Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Равномерное движение материальной точки по окружности
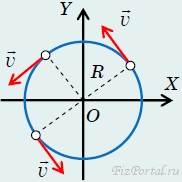
Движение по окружности является достаточно распространенным в окружающем нас мире: при вращении любого твердого тела вокруг фиксированной оси все точки этого тела движутся по окружностям. Так как все окружности подобны, то достаточно описать движение одной из них, чтобы описать вращение всего твердого тела. Кроме того, равномерное движение по окружности является простейшим криволинейным движением. Пусть материальная точка движется с постоянной по модулю скоростью v по окружности радиуса R. При таком движении направление вектора скорости v постоянно изменяется (рис. 71), следовательно, как и при любом криволинейном движении, движение по окружности есть движение с ускорением.
рис. 71
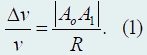
Рассмотрим изменение вектора скорости тела за малый промежуток времени Δt (рис. 72). Обозначим положение точки, движущейся по окружности радиуса R, в некоторый момент времени Аo.
рис. 72
Вектор скорости vo в этот момент направлен по касательной к окружности, то есть перпендикулярно радиусу ОАo. За время Δt частица переместилась в точку A1, ее скорость v1 изменила направление и стала перпендикулярна радиусу ОА1 (но модуль ее остался неизменным: |vo| = |v1| = v). Для того чтобы вычислить изменение скорости, совместим начало векторов vo и v1. Тогда треугольник, образованный векторами скоростей, подобен треугольнику OAoA1. Из подобия этих треугольников следует
Если рассматривать изменение положения частицы и ее скорости за очень малый промежуток времени, то длина хорды |АoА1| будет очень близка к длине дуги АoА1 S = vΔt,
поэтому
откуда получаем
Таким образом, модуль ускорения точки равен:
Чтобы полностью определить вектор ускорения, необходимо выяснить его направление. Заметим, что при малой величине Δt угол между векторами vo и v1 крайне мал, поэтому можно считать, что вектор изменения скорости направлен перпендикулярно1 как вектору vo, так и вектору v1. Следовательно, вектор ускорения в данном случае направлен к центру окружности. Вектор ускорения точки при ее равномерном движении по окружности направлен к центру окружности, а его модуль равен v2/R. Такое ускорение называется центростремительным. Как мы уже отмечали ранее, материальная точка, движущаяся по заданной линии, обладает одной степенью свободы, поэтому ее положение однозначно определяется одной координатой. В случае движения точки по окружности в качестве такой единственной координаты удобно выбрать угол поворота.
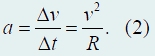
Математическое отступление: радианная мера угла. Градусная мера измерения углов оказывается не слишком удобной при описании механического движения. Поэтому в физике чаще используется другая единица измерения углов. Напомним, углом называется часть плоскости, ограниченная двумя лучами. Построим внутри угла несколько дуг окружностей разных радиусов, центры которых совпадают с вершиной угла (рис. 73).
рис. 73
Длина дуги s, заключенной внутри угла, конечно, зависит от ее радиуса, однако отношение длины дуги к ее радиусу зависит только от величины угла:
s1/r1 = s2/r2 = s3/r3.
Поэтому это отношение может служить мерой угла. Таким образом, радианной мерой угла называется отношение длины дуги окружности с центром в вершине угла и расположенной внутри угла к ее радиусу:
φ = s/r.
Легко установить соответствие между радианной и градусной мерой. Так как длина окружности равна s = 2πr, то полный угол равен φ = 2π радиан2. Соответственно, развернутый угол равен π радиан, прямой угол − π/2 радиан. В общем виде связь между градусной φ° и радианной φ мерой выражается формулами
φ° = (180/π) × φ; φ = (π/180) × φ°. (3)
Один радиан равен
180/π ≈ 57,3°.
Основные достоинства радианной меры заключаются в том, что, s = rφ.
Связывая меру угла с длиной дуги, мы можем рассматривать углы произвольной величины − большие, чем угол 2π (360°). Таким углам соответствует дуга, несколько раз охватывающая целую окружность. Так, например, угол поворота φ = 10π равен пяти полным оборотам. Это очень удобно при описании вращательного движения: чем больше вращается тело, тем больший угол его поворота. Конечно, при движении по окружности материальная точка регулярно проходит через одни и те же положения в пространстве, поэтому, зная угол поворота, мы однозначно определим положение точки, но зная только положение точки (например, ее декартовые координаты), мы не можем однозначно определить угол поворота, так как нам неизвестно, сколько оборотов совершила данная точка к данному моменту времени.
Пусть материальная точка движется по окружности радиуса R. Введем декартовую систему координат, начало которой совместим с центром окружности (рис. 74). Положение точки на окружности однозначно определяется углом φ между осью X и радиус-вектором точки.
рис. 74
Конечно, оси координат можно направить произвольно, да и угол можно отсчитывать от оси Y, однако мы в дальнейшем для однозначности будем отсчитывать угол поворота от оси X в направлении против часовой стрелки. Декартовые координаты точки однозначно выражаются через угол поворота по формулам
При движении точки ее координата, то есть угол поворота, изменяется, становится функцией времени. Поэтому закон движения в этом случае представляется функцией φ(t), то есть зависимости угла поворота от времени. По аналогии с одномерным движением введем понятие угловой скорости. Угловой скоростью ω называется отношение угла поворота к промежутку времени, в течение которого этот поворот произошел, при промежутке времени, стремящемся к нулю:
Единицей угловой скорости является рад/с − радиан в секунду, однако так как радиан является безразмерной величиной, размерность угловой скорости может быть просто 1/с = с−1 − секунда в минус первой степени. При равномерном движении по окружности угловая скорость является постоянной и равна углу поворота в единицу времени. Время одного оборота (эту величину еще называют период вращения) Т легко найти, если вспомнить, что один оборот соответствует углу поворота 2π, поэтому
T = 2π/ω. (6)
Число оборотов в единицу времени называют частотой вращения, и она вычисляется по формуле
n = 1/T = ω/(2π). (7)
Установим связь между угловой и линейной скоростями при движении материальной точки по окружности. Модуль линейной скорости определяется как отношение пройденного пути к промежутку времени, за который этот путь пройден v = S/Δt, а при движении по окружности длина пути (длина дуги окружности) выражается через угол поворота (выраженный в радианах): s = RΔφ, поэтому
v = RΔφ/Δt = Rω. (8)
Запишем также выражение для центростремительного ускорения, используя понятие угловой скорости:
a = v2/R = (Rω)2/R = Rω2. (9)
Специально отметим, что формулы (8) и (9) остаются справедливыми при движении по окружности и в том случае, когда скорость точки изменяется по абсолютной величине. Так, при выводе формулы (8) можно рассмотреть случай Δt → 0. В таком пределе скорость v будет являться мгновенной скоростью, а ω − мгновенной угловой скоростью. При вращении вокруг фиксированной оси направление вращения может иметь только два значения − по часовой стрелке и против часовой стрелки. Поэтому в этом случае можно говорить о двух знаках угловой скорости, обычно − плюс при вращении против часовой стрелки и минус − при вращении по часовой стрелке. Для того чтобы описать произвольное вращение, необходимо задать также ось вращения. Оказывается, удобно задавать ось вращения с помощью вектора, направленного вдоль этой оси. Если совместить эти две характеристики вращения, то получим вектор угловой скорости ω, направление которого совпадает с осью вращения, а модуль равен определенной нами угловой скорости. Используя математическую операцию векторного произведения, можно записать выражение для связи между линейной и угловой скоростями:
Аналогично можно определить вектор углового ускорения:
который определяет не только изменение скорости вращения, но и изменение оси вращения. 1Иными словами, вектор скоростей представляет собой равнобедренный треугольник с очень малым углом при его вершине. Тогда равные углы при основании треугольника будут близки к прямым. 2Часто наименование «радиан» опускают и говорят: «полный угол равен 2π, прямой угол равен π/2 и т. д.
|
|||||||
|
|
Последнее изменение этой страницы: 2021-03-09; просмотров: 252; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.48.3 (0.048 с.) |