Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Трансформаторы в составе печей сопротивленияСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте К специальным трансформаторам, также можно отнести трансформаторы, используемые в составе печей сопротивления и соляных электродных ваннах. В большинстве случаев, для этих целей применяются трансформаторы сухого типа с естественным воздушным охлаждением. Особенностью таких печных трансформаторов является наличие нескольких ступеней регулирования, как правило, не более 8-ми. С одной стороны, это обусловлено необходимостью иметь несколько температурных режимов печи, а с другой – материалом нагревателей, которые могут менять в широких пределах свое сопротивление при изменении температуры. Как правило, переключение ступеней регулирования напряжения происходит без возбуждения, путем изменения числа витков первичной обмотки. Также особенностью таких трансформаторов являются относительно низкие величины вторичного напряжения и большие токи обмотки низкого напряжения. Так как нагрузка в печах сопротивления и соляных электрованнах носит относительно спокойный характер (без режимов эксплуатационных коротких замыканий), то в остальном, конструкция таких трансформаторов может быть идентична сухим силовым трансформаторам общего назначения.
Вопрос 3 Построение круговой диаграммы по опытам ХХ и КЗ. При выполнении опыта холостого хода АМ работает в режиме двигателя. Подводимое к машине напряжение изменяется в пределах (1,15…0,4)
С этой целью берут ток холостого хода Точка О соответствует синхронному холостому ходу, а Вторая точка окружности тока определяется из опыта короткого замыкания АМ. Опыт короткого замыкания выполняется при неподвижном роторе, при этом к обмотке статора подводится пониженное напряжение, которое изменяется в таких пределах, чтобы ток короткого замыкания Для построения круговой диаграммыдвигателя следует данные опыта короткого замыкания привести к номинальному напряжению. Если
Здесь Д Проведя прямую ОТ, через точку Т1 получим линию электромагнитной мощности. Построенная подобным образом круговая диаграмма используется для построения рабочих характеристик. С этой целью необходимо задаться несколькими значениями тока пределах от В заключение отметим, что круговая диаграмма может быть построена и в соответствии с точной схемой замещения. В этом случае диаметр круговой диаграммы поворачивается против часовой стрелки на угол Угол
Билет 26 Вопрос 1 Специальные машины постоянного тока 1) Здесь рассматриваются специальные машины постоянного тока, имеющие наиболее важное значение в теоретическом и практическом отношениях. По схемам соединений их обмоток, а иногда и по конструкции они отличаются от нормальных машин. Большинство же машин постоянного тока, используемых для специальных целей, от нормальных машин не отличаются а) Униполярные машины
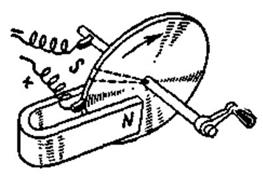
Можно себе представить что изображенный здесь диск состоит из очень большого числа проводников в виде секторов S. Каждый из них при вращении все время будет находиться в поле одной и той же полярности; следовательно, наведенная в нем ЭДС все время будет направлена в одну сторону. При выбранных направлениях поля и вращения она всегда направлена от центра к периферия диска.
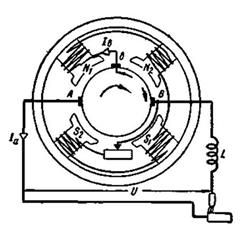
При вращении диска на смену одним проводникам будут приходить в соприкосновение со щетками другие проводники и мы будем получать постоянный ток б) Сварочный генератор с двойной полюсной системой Рассматриваемая машина иначе называется сварочным генератором с «расщепленными» полюсами. Одна из них схематически представлена на рисунке 4.31. Здесь мы имеем двойную полюсную систему N1—N2 и S1—S2, причем полюсы N1 и S1 слабо насыщены, а полюсы N2 и S2 сильно насыщены (их сердечники имеют сравнительно небольшое сечение). Обмотка возбуждения присоединена к главной щетке В и к вспомогательной щетке b, помещенной между главными щетками А и В, находящимися на геометрической нейтрали.
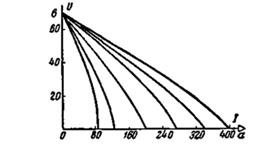
Внешние характеристики сварочного генератора показаны на рисунке 4.32. Они достаточно благоприятны для целей электрической сварки. Установка наибольшего тока (тока короткого замыкания) достигается при помощи реостата в цепи возбуждения, показанного на рисунке 4.31. Реактивная катушка L в цепи якоря служит для сглаживания тока при его резких колебаниях.
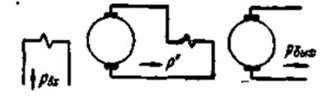
в) Электромашинные усилители Обыкновенный генератор с независимым возбуждением может рассматриваться как усилитель. В этом случае мы должны считать мощность, подведенную к обмотке возбуждения, за «входную» Рвх (или мощностью управления), а мощность на зажимах якоря - за «выходную» Рвых Отношение Рвых/Рвх=kу называется коэффициентом усиления. Для нормальных машин небольшой мощности (0,5…30 кВт) kу=15…50, т.е. в таких машинах мы получаем «усиление» мощности в 15…50 раз (конечно, за счет мощности первичного двигателя, которым должен приводиться во вращение всякий электромашинный усилитель).
Можно при помощи двух генераторов независимого возбуждения получить двухступенчатый усилитель (рис. 4.33). Здесь общий коэффициент усиления будет равен произведению коэффициентов усиления отдельных машин ky=k'yk"y. Он будет, следовательно, значительно больше, чем в предыдущем случае; для нормальных машин при мощности на выходе порядка 30 кВт kу=1000…1200.
Рассмотренные усилители во многих случаях малопригодны для автоматических устройств. Основным их недостатком является большая «инерционность» цепей возбуждения, имеющих большие индуктивности. Отмеченные недостатки в значительно меньшей степени проявляются в электромашинном усилителе поперечного поля, называемом сокращенно ЭМУ поперечного поля
ЭМУ поперечного поля представляет собой коллекторную машину постоянного тока
Вопрос 2 Специальные трансформаторы Специальные трансформаторы представляют собой особый тип устройств, предназначенных для выполнения определенных целей. Наиболее популярными и востребованными являются трехобмоточные, автомобильные, измерительные варианты. Каждая техника обладает собственными видами подключения, нюансами использования. •Трехобмоточный Трехобмоточный тип необходим для корректного распределения поступающий электрической энергии. Используется в радиотехнике, является небольшим по габаритам и весу специальным трансформатором. Он заменяет два двухобмоточных, так как с его помощью получают два вида энергии по номинальным показателям. Качество позволяет упростить работу инженера, потратить меньше на прибор.
Схема трехобмоточного типа проста. Присутствует три несвязанных друг с другом обмотки, которые находятся на одном стержне. На первичную обмотку поступает энергия, создается магнитный поток. В результате обмотки 2 и 3 дают различные номинальные показатели, при этом в сумме они всегда дают большее число, чем одна первая. •Автомобильные Специальные типы автомобильных трансформаторов широко применяются в конструировании средств передвижения. В отличии от обычного оборудования есть связь сторон ВН и НН (последняя часть обмотки первой). В зависимости от числа витков изменяется то, будет ли коэффициент повышающими или понижающим. Ток нагрузки действует на участок обмотки не целиком, а выборочно, при этом трансформация не отличается от единицы. Токи практически идентичные, в результате возникают показатели небольшие. Устанавливают провода меньшего сечения, так как это не влияет на функциональность. Обратите внимание, что:
мощность передается во вторичную сторону; чем сильней коэффициент стремится к единице, тем больше мощности уходит во вторичную сторону; сечения идентичные с привычным трансформатором, если индукция и поток одинаковы. •Измерительные Измерительные трансформаторы используются для расширения функционала приборов. В результате внедрения оборудования в конструкцию снижается риск короткого замыкания — повышается безопасность на производстве. Измерительная техника применяется в устройствах сигнализации, релейной защиты и автоматических устройствах.
Прибор состоит из нескольких обмоток и магнитного провода. Первичная подключается последовательным образом, включается в сеть. Вторичная имеет обмотки меньшего сечения, но большее число. К устройству подключатся счетчики, амперметры, катушки, трансформаторы работают на токах от 5 до 15 тысяч Ампер. Коэффициент трансформации — это сумма токов внешней и внутренней обмоток. Узнать значение параметра можно на эксплуатационном листе измерительного трансформатора. •Трансформаторы напряжения Устройства применяются в схемах оборудования с напряжением от 380 В. Схема схожа с силовыми понижающими приборами. Первичная обмотка состоит из конструкций малого сечения, подключается параллельно. Вторичная имеет большие по размеру витки. Сопротивление приборов вольметров, катушек, частотометров максимальное, при помощи трансформатора напряжения понижающего типа вносят корректировку в работу. •Трансформаторы в составе печей сопротивления К специальным трансформаторам, также можно отнести трансформаторы, используемые в составе печей сопротивления и соляных электродных ваннах. В большинстве случаев, для этих целей применяются трансформаторы сухого типа с естественным воздушным охлаждением. Особенностью таких печных трансформаторов является наличие нескольких ступеней регулирования, как правило, не более 8-ми. С одной стороны, это обусловлено необходимостью иметь несколько температурных режимов печи, а с другой – материалом нагревателей, которые могут менять в широких пределах свое сопротивление при изменении температуры. Сайт: https://otransformatore.ru/izmeritelnyj/spetsialnye-transformatory/ регулирование частоты вращения двигателей постоянного тока можно осуществлять путем изменения потока Ф, введения дополнительного сопротивления в цепь якоря и изменения напряжения сети. В двигателях параллельного возбуждения наиболее просто осуществляется регулирование изменением потока, реализуемого с помощью реостата в цепи возбуждения. При увеличении сопротивления поток Ф уменьшается и частота вращения растет сайт: https://leg.co.ua/knigi/oborudovanie/elektricheskie-mashiny-51.html Вопрос 3 Регулирование частоты вращения двигателя постоянного тока Задача управления двигателем в основном сводится к регулированию частоты вращения. Реже встречается задача управления моментом двигателя. Из формулы n следует, что изменение частоты вращения может достигаться тремя способами: включением реостата R р в цепь якоря (реостатное регулирование); изменением магнитного потока Φ (полюсное регулирование); изменением подводимого к якорю напряжения (якорное регулирование).
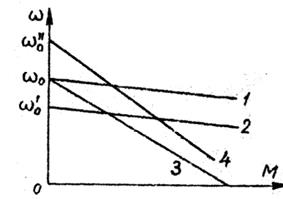
Изменение характеристик при регулировке частоты вращения ДПТ с помощью: а – Ф (параллельное возбуждение); б – Ф или U якоря (последовательное возбуждение); в – U якоря (неза- висимое возбуждение) При реостатном регулировании вместо пускового реостата R п в цепь якоря вводится регулировочный реостат R р, рассчитанный на длительные тепловые перегрузки. Ступенчатое увеличение R р при M c = = const снижает частоту вращения (характеристики И3, И2, И1, Е – рис. Пуск ДПТ с реостатом). Из-за больших потерь в R р этот способ регулирования применяют только для двигателей небольшой мощности. Полюсное регулирование. Для ДПТ параллельного возбуждения изменение магнитного потока Φ достигается введением регулировочного реостата R р в цепь ОВ. При увеличении R р ток I в и магнитный поток Φ уменьшаются, что дает увеличение частоты холостого хода n 0. Жесткость механической характеристики уменьшается незначительно Таким образом, изменением (уменьшением) магнитного потока можно увеличить частоту вращения n, но не более чем до 2 n ном, что связано с ухудшением коммутации. Регулирование n в сторону уменьшения практически невозможно из-за насыщения магнитной системы. Сильное снижение Φ, например до величины Φост, при случайном обрыве обмотки возбуждения при незначительном моменте M с на валу ведет к «разносу» двигателя (пунктирная характеристика на рис. а). Якорное регулирование (регулирование частоты изменение напряжения в цепи якоря).
Рисунок 1 Пусть механическая хар-ка 1 (см.рис) получена при напряжении U1 и потоке возбуждения Ф1. Изменение напряжения приведет к тому, что изменится скорость идеального холостого хода w0=U/KeФ, т.е. скорость при моменте сопротивления, равном нулю (реально при отсутствии полезной нагрузки на валу действует момент сопротивления М0). Наклон характеристики, определяемый коэффициентом (rя+rд)/кекмФ2, не зависит от напряжения. Характеристика 2 соответствует значению U2<U1. Этот способ регулирования следует признать основным для ДПТ. Он позволяет осуществлять регулирование скорости в широких пределах при сохранении постоянного наклона характеристик. Способ экономичен: уменьшение механической мощности на валу P2=wM достигается уменьшением потребляемой от сети электрической мощности P1=UI+UвIв за счет уменьшения напряжения U. Основной недостаток способа – большая мощность регулирования UI, что требует применения соответствующих по мощности управляющих устройств. Билет 27 Вопрос 1 Векторные диаграммы АМ в генераторе Для построения векторной диаграммы необходимо рассмотреть соотношение, величины вторичного тока I2 при вращающемся с любым скольжением роторе:
В генераторном режиме s<0 и, согласно выше написанному выражению, по-прежнему величина I меняет знак, т.е. становится отрицательной и меняет свою фазу на 180. Физически это объясняется тем, что поле вращается относительно ротора по сравнению с двигательным режимом в обратную сторону, вследствие чего изменяются знаки ЭДС E2S и активной составляющей тока I2. В результате изменяется также знак вращающего момента, т.е. последний действует против направления вращения и становится тормозящим. На основании изложенного построена векторная диаграмма на рисунке 2.
Рисунок 2
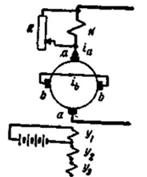
Вопрос 2 Вращающиеся трансформаторы
Сайт: https://rep.bntu.by/bitstream/handle/data/29054/Vrashchayushchiesya_transformatory.pdf?sequence=1&isAllowed=y
Вопрос 3 Вентильные двигатели вентильные двигатели включают в себя три подсистемы: Электронную. Механическую. Электрическую В результате получается мехатронное устройство, которое позволяет сделать корпус более компактным, избавиться от дополнительных деталей, лишних преобразователей, а соответственно сделать весь привод механизма более надежным.
Устройство и работа Вентильный электродвигатель представляет собой измененный вариант коллекторного мотора постоянного тока. Мотор имеет индуктор, расположенный на роторе, обмотка якоря находится на статоре. Электричество подается управляющими командами на статорные обмотки, в зависимости от угла поворота ротора, который определяется встроенными датчиками Холла.
Контроллер вентильного двигателя подключает обмотки статора так, что направление магнитного поля статора всегда перпендикулярно направлению поля ротора. Благодаря широтно-импульсной модуляции контроллер управляет током, который проходит по обмоткам. В результате создается момент вращения ротора, который регулируется. Виды Вентильные двигатели бывают постоянного и переменного тока. Кроме того, их разделяют на виды по числу фаз: Однофазные. Это наиболее простая конструкция вентильных двигателей с минимальным числом связей между электронной системой и мотором. К недостаткам однофазных двигателей относятся большие пульсации, невозможность пуска при некоторых положениях ротора. Однофазные моторы широко используются в механизмах, где необходима высокая скорость работы. Двухфазные. Такие вентильные двигатели работают в механизмах, где обязательно наличие связи обмотки и статора. К недостаткам можно отнести большой момент вращения и сильные пульсации, способные привести к отрицательным последствиям. Трехфазные. Эта дисковая конструкция мотора применяется для создания момента вращения, не применяя для этого большое число фаз. Этот вид моторов используется во многих отраслях промышленности, а также в бытовых условиях. Это наиболее распространенная конструкция, по сравнению с другими. Трехфазные двигатели вентильного типа, имеющие четное количество полюсов, стали хорошим вариантом для устройств, где требуется сочетание небольшой скорости и высокой мощности. Недостатками 3-фазных вентильных моторов является высокий уровень шума. 4-фазные. У таких двигателей значительно уменьшен момент вращения и пульсаций. Используются они достаточно редко, так как они имеют высокую стоимость. Вентильные двигатели применяются во многих областях производства, например, на буровых установках, в системах охлаждения на химических заводах, на нефтяных скважинах. Сайт: https://electrosam.ru/glavnaja/jelektrooborudovanie/ustrojstva/ventilnye-dvigateli/
Билет 28 Вопрос 1 Формула Клосса
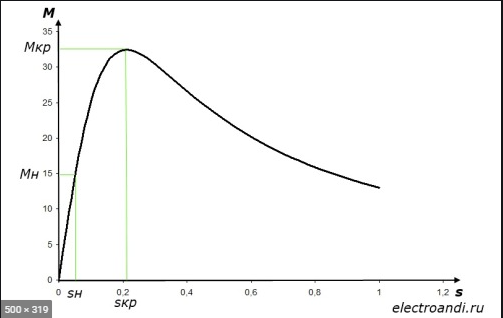
Механические характеристики асинхронных двигателей могут быть выражены в виде n=f(M) или n=f(I). Однако часто механические характеристики асинхронных двигателей выражаются в виде зависимости M = f(S), где S — скольжение, S = (nc-n)/nc, где nс — синхронная скорость. Формула Клосса применяется при решении вопросов, связанных с электроприводом, осуществляемым с помощью асинхронного двигателя. Пользуясь формулой Клосса можно построить график механической характеристики по паспортным данным асинхронного двигателя.
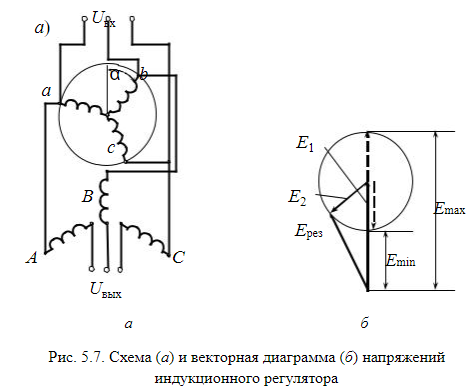
Вопрос 2 Индукционный фазорегулятор Индукционные регуляторы напряжения и фазорегуляторы (фазовращатели) представляют собой асинхронные машины с заторможенным фазным ротором, в которых с помощью поворотного устройства можно изменять положение ротора относительно статора. Намагничивающий ток соединенной с сетью обмотки создает магнитный поток, который наводит ЭДС во вторичной обмотке. Фаза ЭДС меняется в зависимости от взаимного положения осей первичной и вторичной обмоток. В фазорегуляторах на нагрузку подается напряжение от вторичной обмотки, неизменное по амплитуде и меняющееся по фазе в зависимости от угла поворота ротора. В индукционных регуляторах происходит суммирование первичного и вторичного напряжений, при этом изменение фазы ЭДС вторичной обмотки, происходящее при повороте ротора, вызывает изменение напряжения на нагрузке регулятора
Индукционные регуляторы по своей работе аналогичны автотрансформаторам, и их электромагнитная (расчетная) мощность тем меньше проходной (полезной), чем ниже пределы регулирования напряжения. Преимуществом регуляторов является плавное регулирование напряжения в широких пределах.
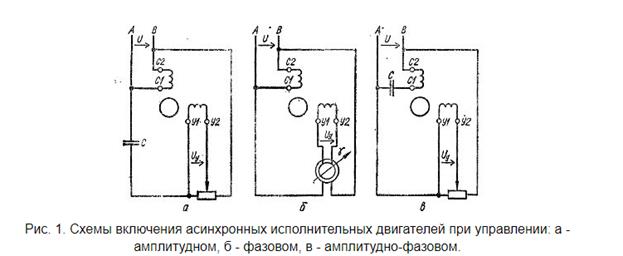
Вопрос 3 Асинхронные исполнительные двигатели Асинхронные исполнительные двигатели (АИД) — это двухфазные АД с короткозамкнутым ротором, которые преобразуют подводимое к ним напряжение сигнала в механическое вращение вала. Асинхронные исполнительные двигатели используют в системах автоматического управления для управления и регулирования различных устройств. Асинхронные исполнительные двигатели начинают действовать при подаче им электрического сигнала, который они преобразуют в заданный угол поворота вала или в его вращение. Снятие сигнала приводит к немедленному переходу ротора исполнительного двигателя в неподвижное состояние без использования каких-либо тормозных устройств. Работа таких двигателей протекает все время в условиях переходных режимов, в результате чего скорость ротора зачастую при кратковременном сигнале не достигает установившегося значения. Этому способствуют также частые пуски, изменения направления вращения и остановки. По конструктивному оформлению исполнительные двигатели представляют собой асинхронные машины с двухфазной обмоткой статора, выполненной так, что магнитные оси ее двух фаз сдвинуты в пространстве относительно друг друга не угол 90 эл. град. Одна из фаз обмотки статора является обмоткой возбуждении и имеет выводы к зажимам с обозначениями C1 и С2. Другая, выполняющая роль обмотки управления, имеет выводы, присоединенные к зажимам с обозначениями У1 и У2. К обеим фазам обмотки статора подводят соответствующие переменные напряжения одинаковой частоты. Так, цепь обмотки возбуждения присоединяют к питающей сети с неизменным напряжением U, а в цепь обмотки управления подают сигнал в виде напряжения управления Uу (рис. 1, а, б, в).
Асинхронные исполнительные двигатели изготавливают на номинальную мощность от долей до нескольких сотен ватт и предназначают для питания от источников переменного напряжения с частотой 50 Гц, а также повышенных частот до 1000 Гц и выше.
Билет 29 Вопрос 1 Линейные асинхронные двигатели Лине́йный дви́гатель — электродвигатель, у которого один из элементов магнитной системы разомкнут и имеет развёрнутую обмотку, создающую магнитное поле, а другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей линейное перемещение подвижной части двигателя. Многие типы линейных двигателей, такие как асинхронные, синхронные или постоянного тока, повторяют по принципу своего действия соответствующие двигатели вращательного движения, в то время как другие типы линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют практического исполнения как двигатели вращательного движения. Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором, или первичным элементом, а часть двигателя, получающую энергию от статора, называют вторичным элементом или якорем (название «ротор» к деталям линейного двигателя не применяется, так как слово «ротор» буквально означает «вращающийся», а в линейном двигателе вращения нет). Наибольшее распространение в транспорте и для больших линейных перемещений получили асинхронные и синхронные линейные двигатели, но применяются также линейные двигатели постоянного тока и линейные электромагнитные двигатели. Последние чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий. Принцип работы Если обмотки статора такого двигателя подключить к сети трёхфазного переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления t: V = 2пf. Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведёт к появлению силы, действующей, по правилу Ленца, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнёт двигаться. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (V - v)/V, где v — скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%.[1] Вторичный элемент линейного двигателя не всегда снабжается обмоткой
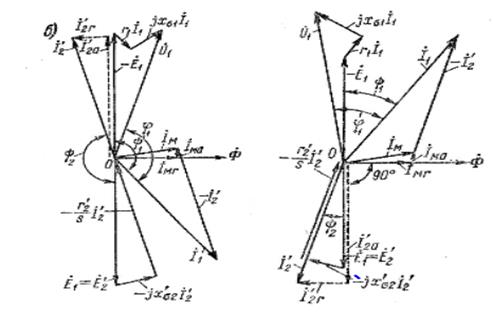
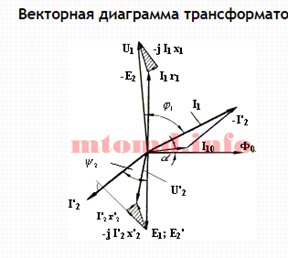
Вопрос 2 Основные уравнения и векторная диаграмма приведённого трансформатора Построение векторной диаграммы: Построение векторной диаграммы удобнее начинать с вектора основного потока Ф. Отложим его по оси абсцисс. Вектор I10 опережает его на угол a. Далее строим векторы ЭДС Е1 и Е2‘, которые отстают от потока Ф на 90°. Для определения угла сдвига фаз между E2‘ и I2‘ следует знать характер нагрузки. Предположим, она активно-индуктивная. Тогда I2‘ отстает от E2′ на угол f2. Для того чтобы достроить векторную диаграмму, необходимо воспользоваться тремя основными уравнениями приведенного трансформатора. Воспользуемся вторым основным уравнением и произведем сложение векторов:
Для этого к концу вектора E2‘ пристроим вектор — j I2‘ x2‘, а к его концу — вектор — I2‘ r2‘. Результирующим вектором U2‘ будет вектор, соединяющий начало координат с концом последнего вектора. Теперь используем третье основное уравнение:
из которого видно, что вектор тока I1 состоит из геометрической суммы векторов I10 и-I2‘. Произведем это суммирование и достроим векторную диаграмму трансформатора. Теперь вернемся к первому основному уравнению:
Чтобы построить вектор — Е1, нужно взять вектор +Е1 и направить его в противоположную сторону. Теперь можно складывать с ним и другие векторы: + j I1 x1 и I1 r1. Первый будет идти перпендикулярно току, а второй — параллельно ему. В результате получим суммарный вектор u1. Построенная векторная диаграмма трансформатора имеет общий характер. По этой же методике можно осуществить ее построение как для различных режимов, так и для разных характеров нагрузки.
|
||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 693; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.018 с.) |
||||||||||||||||||||||||||||

 . При этом регистрируется потребляемые ток
. При этом регистрируется потребляемые ток  и мощность
и мощность  , тогда
, тогда  . По данным опыта холостого хода строят характеристики холостого хода, т.е. зависимости
. По данным опыта холостого хода строят характеристики холостого хода, т.е. зависимости  . Из опыта холостого хода определяют одну из характерных точек, лежащих на окружности токов (рис. 2.17).
. Из опыта холостого хода определяют одну из характерных точек, лежащих на окружности токов (рис. 2.17).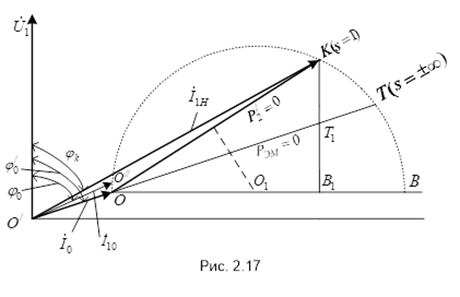
 , соответствующий номинальному напряжению
, соответствующий номинальному напряжению  . Вектор тока
. Вектор тока  отклоняется под углом
отклоняется под углом  к вектору первичного напряжения
к вектору первичного напряжения  , причем
, причем  . Конец этого вектора, т.е. точка
. Конец этого вектора, т.е. точка  лежит на окружности токов. Ток
лежит на окружности токов. Ток  перпендикуляр к оси абсцисс равный величине
перпендикуляр к оси абсцисс равный величине  .
. – току синхронного холостого хода. С достаточным приближением можно считать
– току синхронного холостого хода. С достаточным приближением можно считать  . Точку О будем считать первой характерной точкой окружности токов.
. Точку О будем считать первой характерной точкой окружности токов. не превышал 1,2
не превышал 1,2  . В процессе выполнения опыта короткого замыкания строят характеристики короткого замыкания, т. е. зависимости
. В процессе выполнения опыта короткого замыкания строят характеристики короткого замыкания, т. е. зависимости  , где
, где  .
. линейна, то приведение осуществляются следующим образом
линейна, то приведение осуществляются следующим образом ,
,  .
. – потребляемый ток и мощность короткого замыкания при
– потребляемый ток и мощность короткого замыкания при  .
. ля определения второй точки, лежащей на окружности токов под углом
ля определения второй точки, лежащей на окружности токов под углом  к вектору
к вектору  . Конец вектора
. Конец вектора  , т.е точка К и будет искомой точкой. Соединив точки О и К получим отрезок ОК, который является хордой искомой окружности токов. Для определения центра окружности следует восстановить перпендикуляр к этой хорде. Центр окружности О1 получится в пересечении перпендикуляра с прямой ОВ. Прямая ОК будет являться линией полной механической мощности (
, т.е точка К и будет искомой точкой. Соединив точки О и К получим отрезок ОК, который является хордой искомой окружности токов. Для определения центра окружности следует восстановить перпендикуляр к этой хорде. Центр окружности О1 получится в пересечении перпендикуляра с прямой ОВ. Прямая ОК будет являться линией полной механической мощности ( ). Для получения линии электромагнитной мощности следует опустить перпендикуляр
). Для получения линии электромагнитной мощности следует опустить перпендикуляр  к оси абсцисс и разбить его в отношении
к оси абсцисс и разбить его в отношении  .
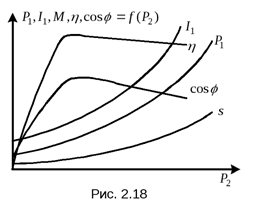
. в
в рис.2.18.
рис.2.18. (рис.2.19), где
(рис.2.19), где  , причем
, причем  аргумент
аргумент  ,
,  .
.