
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принцип работы синхронного двигателя
Принцип действия синхронного электродвигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Концепция вращающегося магнитного поля статора синхронного электродвигателя такая же, как и у трехфазного асинхронного электродвигателя.
Магнитное поле ротора, взаимодействуя с синхронным переменным током обмоток статора, согласно закону Ампера, создает крутящий момент, заставляя ротор вращаться (подробнее). Постоянные магниты, расположенные на роторе СДПМ, создают постоянное магнитное поле. При синхронной скорости вращения ротора с полем статора, полюса ротора сцепляются с вращающимся магнитным полем статора. В связи с этим СДПМ не может сам запуститься при подключении его напрямую к сети трехфазного тока (частота тока в сети 50Гц).
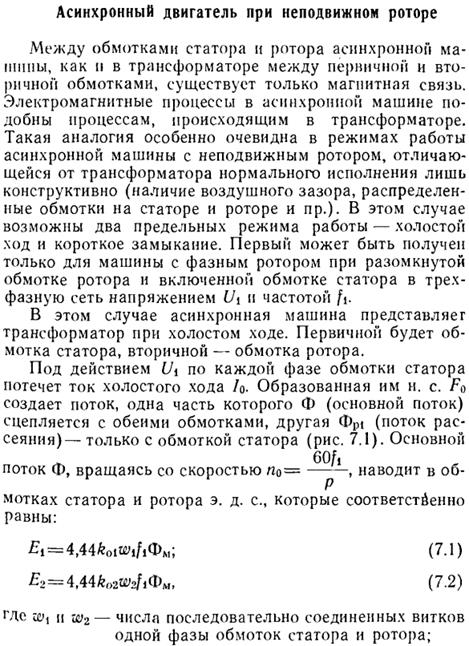
Вопрос 2 АД при неподвижном роторе. Замещение вращающегося ротора эквивалентным неподвижным.
В асинхронной машине при вращающемся роторе происходит преобразование электрической энергии в механическую, если она работает двигателем, и обратное преобразование, если она работает генератором. Кроме того, при вращении ротора частота тока в его обмотке отличается от частоты тока в обмотке статора. В тоже время асинхронная машина при неподвижном роторе с точки зрения преобразования энергии полностью соответствует трансформатору. Возникает желание заменить асинхронную машину при вращающемся роторе эквивалентной ей по энергетическим и электромагнитным процессам машиной при неподвижном роторе. Это возможно, если воспользоваться той особенностью магнитного поля ротора, что оно при любых установившихся режимах вращается синхронно с магнитным полем статора. Наблюдая все магнитные поля в единой системе координат, неподвижной по отношению к статору, можно предположить, что ротор неподвижен. Ток во вращающемся роторе при скольжении s
r2 – активное сопротивление фазы обмотки ротора. Индуктивное сопротивление рассеяния фазы ротора при скольжении s
x2 – индуктивное сопротивление рассеяния при неподвижном роторе. ЭДС, наводимая в фазе ротора при скольжении s
E2 – ЭДС, наводимая в фазе неподвижного ротора (s = 1, f2 = f1). Тогда,
Поделим числитель и знаменатель на скольжение s
Токи I2s и I2 имеют одинаковые значения. Одинаковыми будут углы их сдвига от ЭДС Такая формальная операция не меняет модуля и фазы вторичного тока по отношению к соответствующим ЭДС E2s и E2. Однако, ток I2s и ЭДС E2s=sE2 имеют частоту f2 = sf1, а ток I2 и ЭДС E2 имеют частоту f1. Замена тока I2s эквивалентным током I2 может быть физически истолкована как приведение вторичного (роторного) тока по частоте. При этом сам ротор становится неподвижным. Магнитное поле от тока I2 будет также взаимодействовать с полем статора при неподвижном роторе, как и поле от тока I2s при вращающемся. Чтобы получить ток в обмотке неподвижного ротора таким же по значению и фазе, как во вращающемся роторе, достаточно в цепи этой обмотки установить активное сопротивление r2/s, то есть активное сопротивление обмотки увеличить на величину Асинхронная машина с эквивалентным неподвижным ротором в электрическом отношении будет подобна трансформатору, работающему на чисто активную нагрузку rмх.
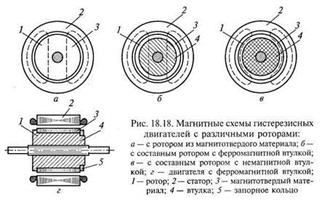
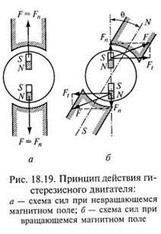
Вопрос 3 Гистерезисный СД. В настоящее время в схемах автоматики получили весьма широкое распространение синхронные гистерезисные микродвигатели. Статор обычного гистерезисного двигателя ничем не отличается от статоров синхронных и асинхронных машин. Пакет статора набирается из изолированных листов электротехнической стали. В полузакрытых (с неширокой прорезью) пазах располагается обычная трехфазная или двухфазная (в конденсаторных двигателях) обмотка, которая при подключении к сети переменного тока создает вращающееся магнитное поле. Ротор большинства гистерезисных двигателей представляет собой сплошной или шихтованный полый цилиндр из магнитотвердого материала, имеющего широкую петлю гистерезиса (обладающего большой остаточной намагниченностью), и располагается на магнитной или немагнитной втулке. Магнитные схемы гистерезисных двигателей с различными роторами представлены на рис. 18.18. Принцип действия гистерезисного двигателя рассмотрим на примере двигателя со сплошным массивным ротором (рис. 18.19). Вращающий момент такого двигателя можно представить как сумму двух моментов: основного гистерезисного МГ, обусловленного наличием большой остаточной намагниченности, и момента от вихревых токов Мв: М= МГ + Мв.
Момент от вихревых токов возникает в результате взаимодействия вращающегося магнитного поля двигателя с вихревыми токами ротора. По своей природе это асинхронный момент. Он равен нулю при синхронизме и вследствие большого активного сопротивления массивного ротора максимален при пуске (n = 0). Если бы двигатель обладал только моментом от вихревых токов, то его механическая характеристика не отличалась бы ничем от механической характеристики обычного асинхронного двигателя с повышенным активным сопротивлением ротора, имеющего sK > 1.
Возникновение гистерезисного момента объясняется наличием у материала ротора широкой петли гистерезиса. При асинхронной скорости вращения ротор, находясь в магнитном поле, все время перемагничивается. При этом ось поля ротора, изготовленного из магнитотвердого материала, при наличии момента сопротивления на валу отстает от оси вращающегося магнитного поля на некоторый угол θ. В результате взаимодействия поля ротора с опережающим его вращающимся магнитным полем статора возникает вращающий гистерезисный момент МГ. Если ротор гистерезисного двигателя поместить в магнитное поле, то он намагнитится, его области спонтанной намагниченности — элементарные магнитики будут ориентированы по силовым линиям магнитного поля. На рис. 18.19 схематично показаны два элементарных магнитика. В результате взаимодействия внешнего поля, которое для наглядности представлено в виде двух полюсов магнита, с элементарными магнитиками ротора возникнут силы F = Fn которые в положении ротора, соответствующем, показанному на рис. 18.18, а, будут направлены радиально. Момент, действующий на ротор в этом случае, будет равен нулю. Если полюсы магнита, а следовательно, внешнее магнитное поле вращать относительно ротора, то элементарные магнитики будут поворачиваться вслед за полем полюсов, однако вследствие молекулярного трения, которое у магнитотвердых материалов весьма значительно, они будут отставать от поля полюсов на некоторый угол θ. Силы взаимодействия F между элементарными магнитиками и полем полюсов магнита в этом случае (см. рис. 18.19, б) кроме радиальных составляющих Fn будут иметь еще тангенциальные составляющие Ft, которые и создадут вращающий гистерезисный момент.
На рис. 18.20 представлены механические характеристики гистерезисного двигателя — зависимости гистерезисного момента МГ, момента от вихревых токов Мв и суммарного момента М = MГ + Мв от частоты вращения n при круговом поле, синусоидально распределенном в пространстве. У гистерезисных двигателей с шихтованным ротором вихревые токи практически отсутствуют, поэтому Мв = 0 и механическая характеристика М= МГ = f(n) имеет вид прямой линии. Роторы гистерезисных двигателей по конструктивному исполнению можно разделить на три группы. 1. Роторы (сплошные или шихтованные), целиком изготовленные из магнитотвердого материала (см. рис. 18.18, а). 2. Сборные роторы, состоящие из полого цилиндра (сплошного или шихтованного), изготовленного из магнитотвердого материала и ферромагнитной втулки (см. рис. 18.18, б). Такие роторы обычно применяются в случае, если магнитотвердый материал имеет малую магнитную проницаемость μ(сравнительно небольшую индукцию насыщения Вm при большой коэрцитивной силе Нс).
3. Сборные роторы, состоящие из активной части — полого (сплошного или шихтованного) цилиндра из магнитотвердого материала — и немагнитной (μ = 1) втулки из алюминия или пластмассы (см. рис. 18.18, в). Такие роторы применяются в том случае, когда магнитотвердый материал имеет сравнительно большую магнитную проницаемость μ(большую Вт при сравнительно небольшой Нс). Наибольшее распространение в настоящее время получили роторы второй и третьей групп. В некоторых двигателях активная часть ротора изготовляется не из листов, а из проволоки, полос или пресс-порошка. Положительные качества синхронных гистерезисных двигателей следующие: большие пусковой момент и момент входа в синхронизм; независимость момента входа в синхронизм от момента инерции; плавность входа в синхронизм — отсутствие рывка; незначительное изменение тока — на 20... 30 % от пуска (n = 0) до холостого хода (n = nс) и на 1... 3 % от холостого хода до номинальной нагрузки; сравнительно высокий КПД, достигающий в некоторых двигателях 60%; малое время разгона; большая механическая прочность и симметрия ротора, что позволяет создавать высокоскоростные двигатели, в том числе гидродвигатели; способность одного и того же ротора работать в магнитных полях различной полюсности — полисинхронизм ротора, позволяющий создавать многоскоростные синхронные двигатели, хотя и неравноценные по качеству на различных скоростях из-за различного намагничивания активного материала ротора; высокая температурная стабильность пусковых и рабочих характеристик, обусловленная тем, что изменение температуры влияет лишь на значение активного сопротивления обмотки статора; высокая надежность, малый уровень шума и сравнительно небольшие габариты и масса. Недостатки синхронных гистерезисных двигателей, ограничивающие области их применения, сводятся к следующим: низкий коэффициент мощности (cosφ), не превосходящий 0,3...0,45; малая стабильность мгновенной скорости вращения — качание ротора при резко изменяющихся нагрузках; большой технологический разброс характеристик двигателя, объясняющийся тем, что даже незначительные отклонения от установленного режима термической обработки ведут к значительным изменениям свойств магнитотвердых материалов;
высокая стоимость магнитотвердых материалов и сложность их механической обработки. Билет 25 Вопрос 1 МДС вращающегося ротора АД Основной магнитный поток Ф в асинхронном двигателе создается совместным действием МДС обмоток статора F1 и ротора F2:
где Rм — магнитное сопротивление магнитной цепи двигателя потоку Ф; F0 — результирующая МДС двигателя, численно равная МДС обмотки статора в режиме х.х. [см. (9.16)]: F0 = 0,45m1 I1 ω1 kоб1/ P (12.11) I0 — ток х.х. в обмотке статора, А. МДС обмоток статора и ротора на один полюс в режиме нагруженного двигателя F1 = 0,45 m1 I1 ω 1 k об 1 / P F2 = 0,45 m2 I2 ω 2 k об 2 / P (12.2) где m2 — число фаз в обмотке ротора; ko62 — обмоточный коэффициент обмотки ротора. При изменениях нагрузки на валу двигателя меняются токи в статоре I1, и роторе I2. Но основной магнитный поток Ф при этом сохраняется неизменным, так как напряжение, подведенное к обмотке статора, неизменно (U1 = const) и почти полностью уравновешивается ЭДС Е1 обмотки статора [см. (12.3)]:
Так как ЭДС Е1 пропорциональна основному магнитному потоку Ф [см. (7.20)], то последний при изменениях нагрузки остается неизменным. Этим и объясняется то, что, несмотря на изменения МДС F1 и F2, результирующая МДС остается неизменной, т. е. Подставив вместо F0, F1 и F2 их значения по (12.11) и (12.12), получим 0,45 m1 Разделив это равенство наm1 ω1 kоб1/ p, определим уравнение токов асинхронного двигателя:
где
- ток ротора, приведенный к обмотке статора. Преобразовав уравнение (12.14), получим уравнение токов статора асинхронного двигателя
из которого следует, что ток статора в асинхронном двигателе Следовательно, ток ротора I2 оказывает на магнитную систему двигателя такое же размагничивающее влияние, как и ток вторичной обмотки трансформатора (см. § 1.5). Таким образом, любое изменение механической нагрузки на валу двигателя сопровождается соответствующим изменением тока в обмотке статора I1 так изменение этой нагрузки двигателя вызывает изменение скольжения s. Это, в свою очередь, влияет на ЭДС обмотки ротора [см.(12.6)], а следовательно, и на ток ротора I2. Но так как этот ток развивает размагничивающее действие на магнитную систему двигателя, то его изменения вызывают соответствующие изменение тока в обмотке статора I1 за счет составляющей – I′2. Так, в режиме холостого хода, когда нагрузка на валу двигателя отсутствует и s ≈ 0, ток I2 ≈ 0. В этом случае ток в обмотке статора
Вопрос 2 Специальные трансформаторы. Специальные трансформаторы представляют собой особый тип устройств, предназначенных для выполнения определенных целей. Наиболее популярными и востребованными являются трехобмоточные, автомобильные, измерительные варианты. Каждая техника обладает собственными видами подключения, нюансами использования. Специальный трансформатор — это не определенное устройство, а класс оборудования, который включает в себя несколько видов. Трехобмоточный Трехобмоточный тип необходим для корректного распределения поступающий электрической энергии. Используется в радиотехнике, является небольшим по габаритам и весу специальным трансформатором. Он заменяет два двухомоточных, так как с его помощью получают два вида энергии по номинальным показателям. Качество позволяет упростить работу инженера, потратить меньше на прибор. Схема трехобмоточного типа проста. Присутствует три несвязанных друг с другом обмотки, которые находятся на одном стержне. На первичную обмотку поступает энергия, создается магнитный поток. В результате обмотки 2 и 3 дают различные номинальные показатели, при этом в сумме они всегда дают большее число, чем одна первая. Под номинальный мощностью понимают показатель первичной, хотя в целом, если учитывать суммирование второй и третьей, то оно будет выше. Автомобильные Специальные типы автомобильных трансформаторов широко применяются в конструировании средств передвижения. В отличии от обычного оборудования есть связь сторон ВН и НН (последняя часть обмотки первой). В зависимости от числа витков изменяется то, будет ли коэффициент повышающими или понижающим. Ток нагрузки действует на участок обмотки не целиком, а выборочно, при этом трансформация не отличается от единицы. Токи практически идентичные, в результате возникают показатели небольшие. Устанавливают провода меньшего сечения, так как это не влияет на функциональность. Обратите внимание, что: · мощность передается во вторичную сторону; · чем сильней коэффициент стремится к единице, тем больше мощности уходит во вторичную сторону; · сечения идентичные с привычным трансформатором, если индукция и поток одинаковы. Несмотря на все преимущества автомобильные трансформаторы имеют некоторые недостатки. Среди ни выделяют: · необходимость изоляции обмоток (из-за связи обмоток с разным напряжением); · возможно попадание высокого напряжения на низкое, что пагубно скажется на сроке службы изделия. Трансформаторы такого типа подбираются в строгом соответствии с требованиями автомобильно транспорта. Измерительные Измерительные трансформаторы используются для расширения функционала приборов. В результате внедрения оборудования в конструкцию снижается риск короткого замыкания — повышается безопасность на производстве. Измерительная техника применяется в устройствах сигнализации, релейной защиты и автоматических устройствах. Прибор состоит из нескольких обмоток и магнитного провода. Первичная подключается последовательным образом, включается в сеть. Вторичная имеет обмотки меньшего сечения, но большее число. К устройству подключатся счетчики, амперметры, катушки, трансформаторы работают на токах от 5 до 15 тысяч Ампер. Коэффициент трансформации — это сумма токов внешней и внутренней обмоток. Узнать значение параметра можно на эксплуатационном листе измерительного трансформатора. Приборы этого типа разделяются по классу точности. Погрешность выражается в процентном соотношении тока. Вторичная нагрузка соответствует каждому варианту точности, при этом если она максимальная, то погрешность увеличивается. Трансформаторы напряжения Трансформаторы напряжения – это разновидность трансформаторов, задача которых не преобразовывать, а гальваническая развязка. От источника электроэнергии или станции ток с высоким напряжением не может использоваться потребителями. Чтобы понизить его на входе устанавливаются понижающие трансформаторы. Они дают возможность работать на расчетном напряжении для бытовой техники, электроприборов и электроники. Их использование позволяет осуществлять работу типовых измерительных приборов. Трансформатор изолирует их от высокого сетевого напряжения, что крайне необходимо для их безопасного обслуживания и эксплуатации. По назначению они разделяются на два основных вида – повышающие и понижающие. Преобразование напряжения в домашних условиях крайне необходимо. Бытовые приборы, питающиеся от сети 380 или 220 вольт, нуждаются в напряжении в несколько раз меньше. Во избежание выхода из строя бытового оборудования нужны понижающие. При необходимости используют повышающие аналоги. Кроме главной функции – преобразования напряжения и тока, ТН могут быть источниками питания для автоматики, релейной защиты электролиний от замыкания, сигнализаций и т.п. Также они используются в качестве измерителей напряжения и мощности. По сути – трансформатор напряжения – это статический электромагнитный прибор, который преобразует переменный ток одного напряжения в переменный ток другого напряжения. По конструктивным решениям и по принципу действия он сходен с силовым аналогом. Если параметр превышает значение 3 тысяч, то обязательно применяют специальные масляные варианты, при этом кожух заземляют во избежание производственных травм.
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 229; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.174.239 (0.052 с.) |


 = (
= ( 1 +
1 +  1 ≈ (-
1 ≈ (-  1) (12.13)
1) (12.13) 0 ω1 kоб1/ p = 0,45m1
0 ω1 kоб1/ p = 0,45m1  =
=  (12.14)
(12.14)


