Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
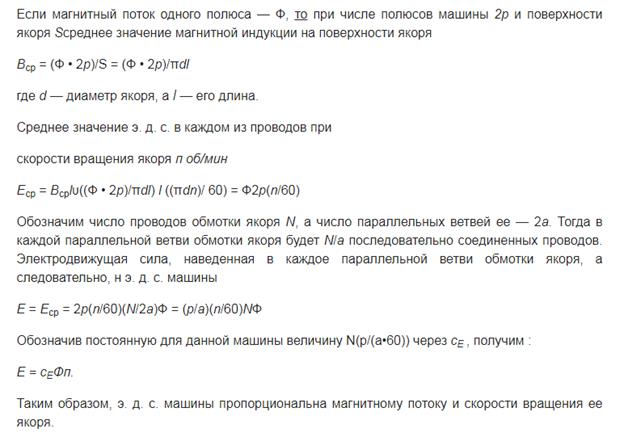
Главные индуктивные сопротивления обмоток переменного тока
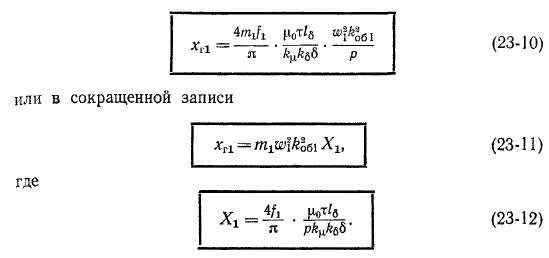
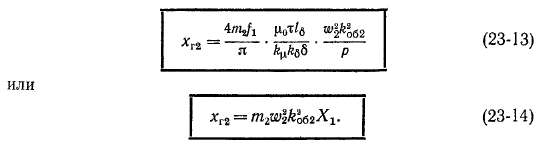
Вращающиеся гармоники магнитного поля обмотки статора асинхронной машины, перемещаясь относительно этой обмотки, индуктируют в ней э. д. с. самоиндукции, частота которых при равномерном воздушном зазоре равна частоте тока в данной обмотке. Во вращающейся машине высшие гармоники поля не создают э. д. с. взаимной индукции основной частоты и их следует, отнести к полям рассеяния. Из-за наличия пазов на статоре и роторе при вращении ротора возникают также дополнительные гармоники, поля, которые индуктируют в обмотках э. д. с. различных, в том числе и относительно высоких, частот. При нормальной конструкции машины эти э. д. с. не имеют существенного значения и ниже не рассматриваются. В электрической машине переменного тока при этом каждой гармонике поля v соответствуют определенные значения индуктивных сопротивлений само- и взаимной индукции xv. Работа машин переменного тока основана на действии основных гармоник поля. I Индуктивные сопротивления, соответствующие этим гармоникам, называют главными. Величины главных индуктивных сопротивлений (Величины, относящиеся к статору и ротору, обозначим соответственно индексами 1 и 2.):
Вопрос 2 Векторная диаграмма АД. Схемы замещения АМ.
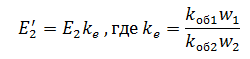
Для построения векторной диаграммы асинхронного двигателя необходимо чтобы параметры цепи ротора были приведены к цепи статора. Это достигается заменой числа витков одной фазной обмотки w2, с числом фаз m2 и обмоточным коэффициентом kоб2 на w1, m1, kоб1. Энергетические параметры должны быть пересчитаны правильно, для того чтобы сохранить энергетические соотношения в двигателе. ЭДС приведенной вторичной обмотки
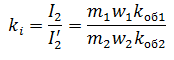
Коэффициент трансформации токов
Отсюда приведенный ток вторичной обмотки
В асинхронном двигателе с короткозамкнутым ротором числа фаз m1 и m2 не равны, потому что каждый стержень короткозамкнутой обмотки рассматривается как отдельная фаза, число витков такой обмотки w2=0.5, а число фаз равно числу стержней m2=Z2. Обмоточный коэффициент для такой обмотки kоб2=1. Исходя из этого ke≠ki, в отличие от трансформатора. Активное и индуктивное сопротивления вторичной обмотки
Угол сдвига фаз между E2’ и I2’
Уравнения токов, напряжений статора и ротора
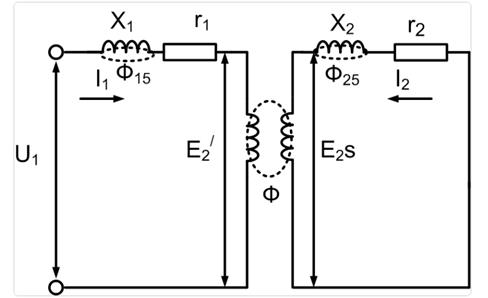
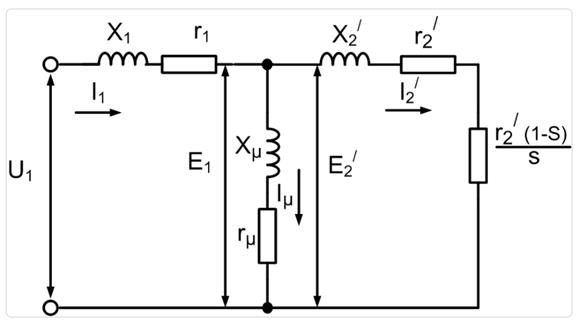
Построение векторной диаграммы начинается с вектора основного магнитного потока Ф. Затем откладываются вектора E2’ и E1, которые отстают от вектора Ф на 90⁰. Затем зная угол сдвига фаз ψ2 между I2’ и E2’, строят вектор I2’. Вектор I0 опережает Ф на угол δ, а вектор I1 находят как векторную сумму I0 и -I2’. Вектор U1 строим, добавляя к вектору –E1 падение напряжения I1r1 параллельно вектору I1, затем откладываем jI1x1 и получаем вектор I1Z1, который складываем с –E1 и в итоге получаем U1. Так как асинхронный двигатель в данном случае можно рассматривать как трансформатор, работающий на активную нагрузку, то вектор –I2’r2’(1-s)/s откладываем под тем же углом, что и I2', затем прибавляем к нему –I2’r2’ и –jI2’x2, получаем вектор –I2’Z2. Схемы замещения Упрощенная картина магнитных потоков работающего асинхронного электродвигателя позволяет представить его в виде эквивалентной схемы: Электромагнитная связь первичной и вторичной цепи осуществляется потоком взаимоиндукции Ф, индуктирующим в роторной обмотке ЭДС Е2S. Сопротивление индуктивное первичной цепи Х1 обусловлено наличием потока рассеивания, связанного только с этой цепью. Аналогично сопротивления Х2 обусловлено потоком рассеивания Ф25. Частота тока ротора будет определяться скоростью его вращения относительно скорости вращения магнитного поля статора, то есть зависеть от скольжения и будет равна f2 = f1S. Ток вторичной цепи при вращающемся роторе: Также выражения для I2 может иметь:
Вместо вращающегося ротора можно рассматривать неподвижный, в котором будет индуцироваться ЭДС Е2. При этом индуктивное сопротивление будет равно Х2, а активное возрастет на величину
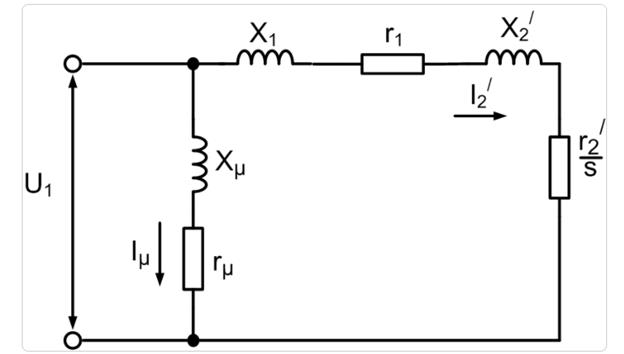
Т – образная схема замещения После приведения первичной и вторичной ЭДС они будут равны Е1 = Е2/ и это дает возможность соединить эквивалентные точки и получить такую схему: Недостатком Т – образной схемы замещения помимо сложностей расчета, является зависимость всех токов I1, I2/, Iμ от скольжения s. Из Т – образной схемы замещения видно, что в режиме холостого хода, при I2/ = 0 и s = 0, ток в контуре будет обуславливаться сопротивлениями намагничивающего контура и первичной цепи и совсем не будет зависеть от скольжения. Данное обстоятельство позволит вынести на зажимы электродвигателя намагничивающий контур и перейти к Г – образной схеме замещения. Г – образная схема замещения
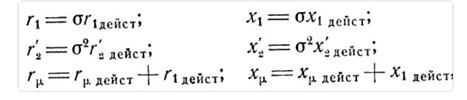
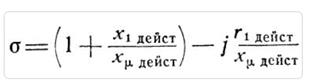
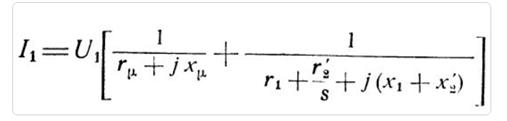
Учет контура намагничивания необходим при определении I1, который потребляется из сети. Но Г — образная схема замещения будет справедлива лишь при наличии определенных допущений: · Все цепи имеют неизменные (постоянные) параметры. Это значит, что приведенное вторичное сопротивление r2/ не будет зависеть от частоты цепи вторичной (ротора), а насыщение не будет влиять на реактивное сопротивление статорных и роторных обмоток Х1 и Х2/; · Полная проводимость намагничивающего контура принимается неизменной, а ток намагничивания, независимо от нагрузки, будет всегда пропорционален напряжению, приложенному к обмоткам; · Потери добавочные не учитываются; · Паразитные моменты, создаваемые высшими гармониками МДС, также не учитывают. В Г – образной схеме замещения в величины сопротивлений необходимо внести соответствующие поправки: Где: В выше перечисленных уравнениях величины имеющие индекс «дейст» соответствуют реальным значениям параметров асинхронной машины, а без индексов – те, которые используют в эквивалентной схеме. Поскольку отношение r1/xμ мало, то практически довольно часто принимают:
Обычно δ лежит в пределах 1,05 – 1,1. Первичный ток I1 будет равен при любом скольжении:
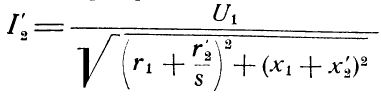
Приведенный роторный ток:
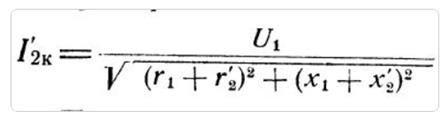
Показанное выше выражение показывает, что ток ротора является функцией скольжения. При s = 0 I2/ = 0. При увеличении скольжения I2/ также будет расти, а при s = 1 достигнет своего максимума, или тока короткого замыкания, или пускового:
Если в роторной цепи отсутствует добавочное сопротивление (АД с КЗ ротором), пусковой ток может достигнуть довольно приличных значений, а именно 5 – 8 раз больше чем его номинальное значение Вопрос 3 Обобщенная электрическая машина. Комплексные уравнения электрических машин Обобщенная машина является упрощенной моделью реальной машины. Ее отличительными признаками являются: 1. Сосредоточенные в пазах проводники с током заменены синусоидальными токовыми слоями, эквивалентными по магнитодинамической силе (МДС) первым гармоникам МДС соответствующих реальных обмоток. 2. Не учитывается неравномерность воздушного зазора, обусловленная пазами. 3. Наличие явнополюсной структуры на статоре (роторе) учитывается введением первой гармоники переменной составляющей зазора. Явнополюсный (с явновыраженными полюсами) ротор обычно используют в машинах с четырьмя и большим числом полюсов. Обмотку возбуждения выполняют в этом случае в виде цилиндрических катушек 2 прямоугольного сечения, которые размещают на сердечниках 3 полюсов и укрепляют полюсными наконечниками. Двухполюсные и четырехполюсные машины большой мощности, работающие при частоте вращения ротора 1500 и 3000 об/мин, выполняют, как правило, с неявнополюсным ротором.
4. Магнитная цепь имеет очень высокую магнитную проницаемость и не насыщается, то есть считается, что энергия магнитного поля сосредоточена в воздушном зазоре. Влияние явнополюсности учитывается введением переменной радиальной магнитной проницаемости
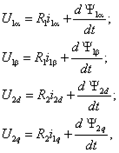
Где - соответственно электрической и геометрический угол поворота ротора относительно статора; 5. Полные сопротивления фаз статора и ротора равны. Математическое описание процессов электромеханического преобразования энергии в обобщенной машине Обобщенная электрическая машина может быть представлена схемой приведенной на рис. Две обмотки статора размещены в ортогональной системе координат Для координат и параметров обобщенной машины будем использовать следующую систему индексов. Индексами 1 и 2 будем обозначены координаты и параметры, относящиеся соответственно к статору и ротору; индексы Динамика обобщенной электрической машины описывается четырьмя уравнениями электрического равновесия в цепях ее обмоток (выраженные через потокосцепления) и уравнением электромеханического преобразования энергии.
где Уравнения (2.2) однотипны и их можно записать в компактной обобщающей форме: Потокосцепления обмоток в общем виде определяются результирующим действием токов всех обмоток машины:
Обобщенная форма записи этой системы При работе машины взаимное положение обмоток статора и ротора изменяется, поэтому собственные и взаимные индуктивности обмоток в общем случае являются функцией угла поворота ротора
Взаимные индуктивности обмоток статора и ротора проходят полный цикл изменений при повороте ротора на угол С учетом выражения (2.5) уравнения электрического равновесия можно представить в обобщенной форме записи В результате взаимодействия токов, протекающих по обмоткам обобщенной машины, на ее роторе создается электромагнитный момент М, который может быть определен с помощью известных соотношений: С помощью выражения (2.5) электромагнитный момент может быть выражен через токи обмоток:
Так как Первый член каждого уравнения (2.12) представляет собой падение напряжения на активном сопротивлении цепи данной обмотки, второй – результирующую ЭДС самоиндукции и взаимной индукции Следовательно, математическое описание процессов преобразования энергии в обобщенной электрической машине в общем виде имеет следующий вид:
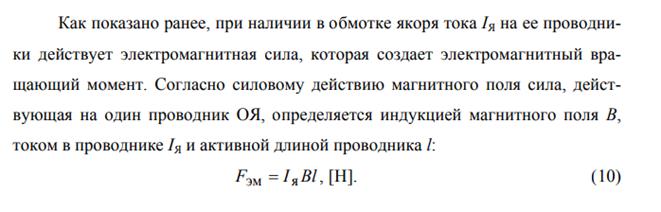
Билет 5 Вопрос 1 Электромагнитные силы и моменты в ЭМ. Сила:
Момент:
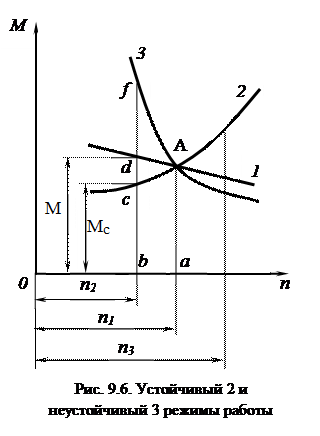
Вопрос 2 Условия устойчивости работы АМ.
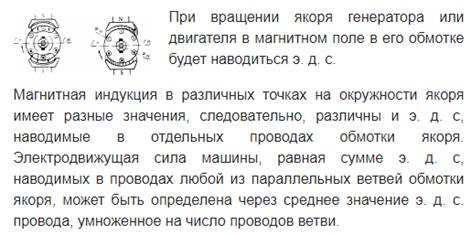
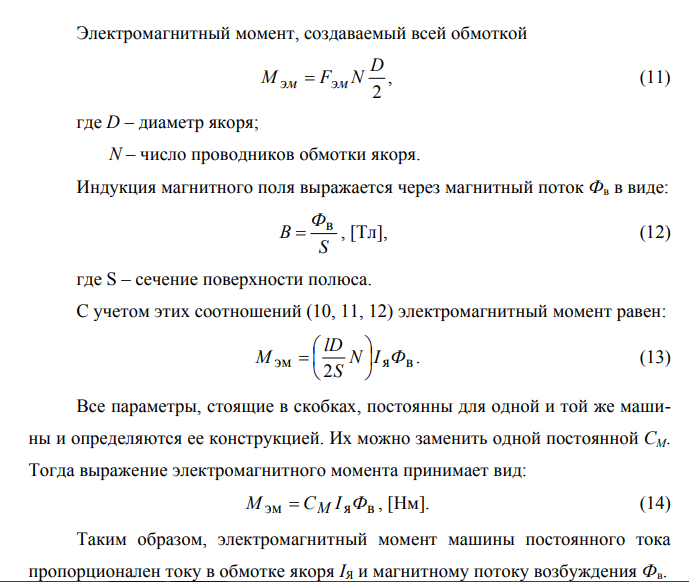
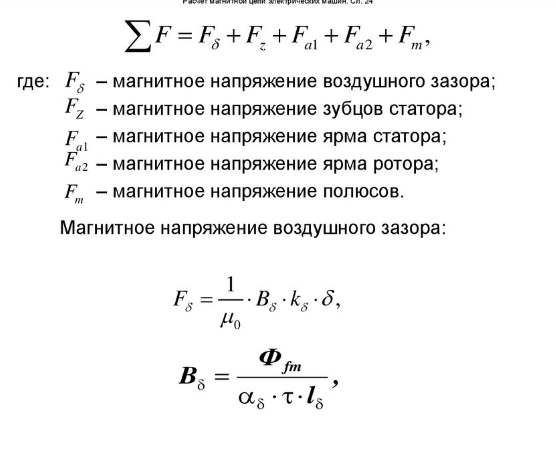
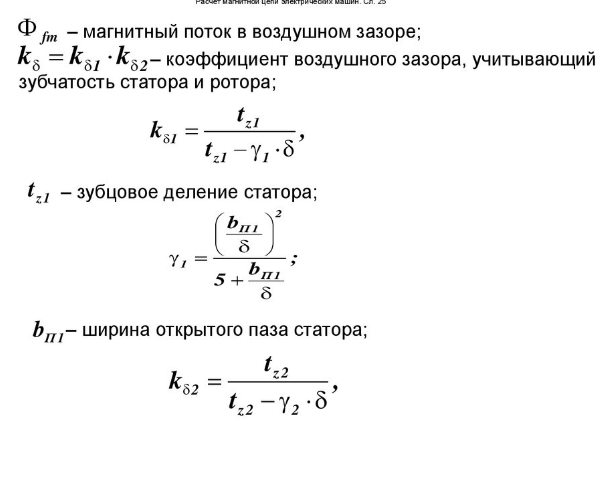
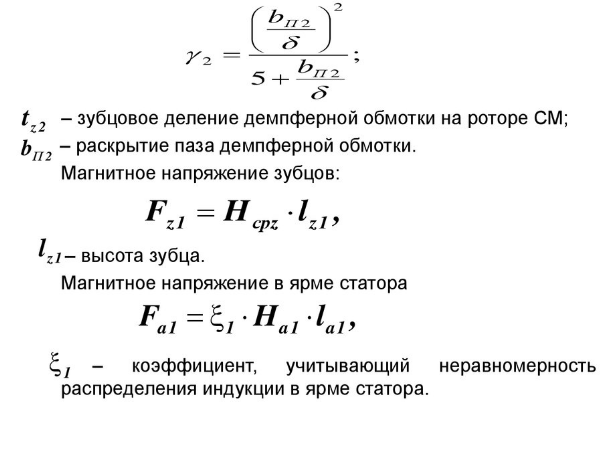
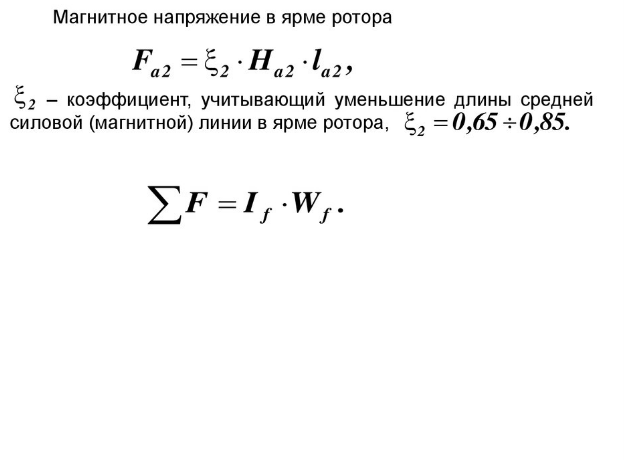
Вопрос 3 Магнитное поле якоря. Расчет магнитной цепи машины. Реакцией якоря называется воздействие магнитного поля, создаваемого током якоря, на магнитное поле главных полюсов машины. В режиме холостого хода ток якоря равен нулю и магнитное поле машины образуется только главными полюсами.Оно симметрично относительно оси главных полюсов и относительно геометрической нейтрали. Если отключить обмотку возбуждения и подключить якорь к источнику питания, то протекающий в обмотке якоря ток создаст магнитное поле. Магнитная ось полюсов этого поля совпадает с осью щеток и перпендикулярна оси поля главных полюсов. Вращение якоря не влияет на картину поля якоря, т.к. распределение тока в обмотке якоря остается постоянным. В рабочем режиме машины включены обе обмотки и магнитное поле образуется суммированием обоих полей. В результате ось магнитного поля поворачивается на некоторый угол
В результате смещения часть проводников параллельной ветви, расположенных между щеткой и нейтралью окажется под полюсом противоположной полярности и будет создавать тормозной момент. Изменение нагрузки машины будет приводить к изменению тока якоря и соответствующему усилению или ослаблению его магнитного поля. Поэтому угол Помимо смещения нейтрали реакция якоря уменьшает общий магнитный поток за счет того, что поле под главными полюсами искажается. Под одним краем полюса оно ослабляется, а под другим усиливается, но усиление поля в результате насыщения края полюса оказывается меньше ослабления и результирующий магнитный поток уменьшается, что отрицательно сказывается на энергетических показателях машины. Смещение физической нейтрали оказывает также негативное влияние на процесс коммутации. Наиболее эффективным средством уменьшения влияния реакции якоря является компенсационная обмотка. Она укладывается в специальные пазы главных полюсов и включается последовательно в цепь якоря. Магнитное поле компенсационной обмотки направлено встречно и, как следует из ее названия, компенсирует магнитное поле якоря. Ток компенсационной обмотки равен току якоря, поэтому компенсация происходит при всех режимах от холостого хода до полной нагрузки. В результате поле машины под главными полюсами остается практически неизменным. Однако в межполюсном простанстве часть МДС якоря остается не скомпенсированной и оказывает отрицательное влияние на работу щеточно-коллекторного узла. Компенсация реакции якоря в этой области осуществляется применением добавочных полюсов. Компенсационные обмотки сильно усложняют и удорожают машину, поэтому они используются только в специальных двигателях средней и большой мощности. Другим способом компенсации является увеличение зазора между краями главных полюсов и якорем. Для сохранения потока при увеличении зазора требуется увеличение МДС обмотки возбуждения. Это приводит к увеличению полюсов, катушек и в целом к ухудшению массогабаритных показателей. Увеличение зазора используют в машинах малой и средней мощности. В микромощных машинах (< 1 кВт) реакцию якоря компенсируют установкой щеток на физическую нейтраль. При этом полная компенсация возможна только при одном значении тока якоря, т.е. только при какой-либо одной постоянной нагрузке. Однако в результате сдвига все же в машине существенно улучшается коммутация.
Билет 6 Вопрос 1 Электромагнитные силы и моменты в ЭМ. (тоже самое,что и в 1 вопросе моего 5 билета)
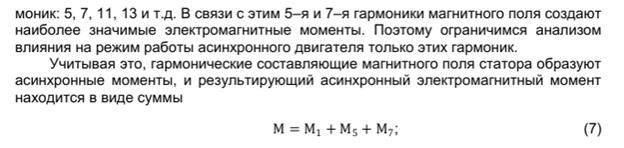
Вопрос 2 Электромагнитные моменты от высших гармоник магнитного поля.
Вопрос 3 Влияние поля якоря на величину магнитного потока и ЭДС машины.
Смещение магнитного поля генератора. Под реакцией якоря понимают явление воздействия магнитного поля, создаваемого током якоря, на магнитное поле главных полюсов. При холостом ходе генератора магнитное поле машины образовано только главными полюсами. Оно симметрично относительно оси полюсов и его ось совпадает с осью полюсов. Когда генератор работает с нагрузкой, по обмотке якоря протекает ток, который создает свое магнитное поле, называемое полем якоря. Ось магнитного поля якоря совпадает с линией, соединяющей щетки, т.е. с геометрической нейтралью, и перпендикулярна оси главных полюсов. При вращении якоря распределение тока в проводниках якоря остается неизменным и поле якоря — неподвижным в пространстве. Индукция этого поля пропорциональна току в якоре. При работе генератора с нагрузкой поле якоря накладывается на поле полюсов. В генераторе создаётся результирующее поле (рис 1.10, В), повернутое по направлению вращения якоря на некоторый угол у относительно поля главных полюсов. Физическая нейтральная линия оказывается повернутой на тот же угол Результаты смещения магнитного поля. Смещение физической нейтральной линии вызывает нежелательные последствия, приводящие к ухудшению работы генератора: Ø уменьшается ЭДС, так как щетки оказываются установленными в точках, между которыми разность потенциалов не максимальная; Ø переключение проводников обмотки якоря из одной параллельной ветви в другую происходит не на физической нейтрали, а на геометрической, где расположены щетки и где результирующее поле В′≠ 0, что, как будет показано в следующем параграфе, приводит к искрению щеток и обгоранию коллекторных пластин; Ø индукция магнитного поля под полюсами распределяется неравномерно; под краем полюса, на который якорь набегает, она уменьшается, а под краем полюса, с которого сбегает, – увеличивается настолько, что может создаться насыщение сбегающего края полюса и зубцов якоря. В результате появится продольная размагничивающая составляющая поля якоря, направленная против поля главных полюсов, что также приведет к уменьшению ЭДС якоря. Кроме того, в части проводников, находящихся в зоне магнитного насыщения, наводится значительная ЭДС, которая может вызвать пробой изоляции между соседними коллекторными пластинами и повышенное искрение на коллекторе. Смещение магнитного поля двигателя. У двигателя постоянного тока при том же направлении тока в якоре направление вращения якоря по сравнению с генератором противоположное, а картина распределения полей одинаковая. Результирующее поле и физическая нейтральная линия оказываются повернутыми на угол Это приводит к нежелательным последствиям: уменьшается вращающий момент двигателя, так как часть проводников параллельной ветви, расположенных между щеткой и физической нейтралью, будет находиться в зоне полюса противоположной полярности – эта часть проводников будет создавать тормозной момент. Способы уменьшения влияния реакции якоря. Наиболее действенным и распространенным средством уменьшения влияния реакции якоря на работу машины является применение дополнительных полюсов. Дополнительные полюсы устанавливаются на геометрической нейтральной линии между главными полюсами. Их обмотка включается последовательно с обмоткой якоря и намотана так, что ее магнитное поле направлено против магнитного поля якоря. В зоне геометрической нейтральной линии создаются условия, благоприятные для безыскровой работы щеток (более подробно этот вопрос рассмотрен в следующем параграфе). Дополнительные полюсы выполняют свои функции во всех режимах работы машины: при изменении нагрузки одновременно изменяются ток и поле якоря, ток и поле дополнительных, полюсов; при переходе машины в режим двигателя одновременно изменяется направление токаи поля якоря и направление тока и поля дополнительных полюсов. Для выравнивания индукции под полюсами в быстроходных машинах большой мощности (свыше 80 кВт на один полюс) применяют компенсационную обмотку, которую закладывают в специальные пазы в полюсных наконечниках. Компенсационная обмотка включается последовательно с обмоткой якоря и обмоткой дополнительных полюсов. Магнитное поле компенсационной обмотки всегда направлено навстречу магнитному полю якоря и таким образом оно компенсирует поле якоря в зоне главных полюсов. В машинах малой мощности (до нескольких сотен ватт) вместо дополнительных полюсов применяют сдвиг щеток с геометрической нейтральной линии. При этом, создаются условия, уменьшающие искрение щеток из-за влияния реакции якоря.
!!!Ниже второй вариант ответа,но он мне нравится больше!!! (Слова Ромы) Под реакцией якоря в синхронных машинах понимают воздействие магнитного поля статора (якоря) на магнитное поле ротора. Реакция якоря оказывает сильное влияние на все электромагнитные процессы в машине. Явление реакции по определению связано с магнитным полем статора, поэтому характер и степень влияния реакции определяется током статора, т.е. нагрузкой машины.
При чисто активной нагрузке (R) ток При чисто индуктивной нагрузке (L) ток статора и магнитный поток отстают от ЭДС При чисто емкостной нагрузке (C) ток статора и магнитный поток опережают ЭДС на В случае активно-реактивной нагрузки (RL и RC) поток статора оказывается смещенным на угол меньший, чем Таким образом реакция якоря в синхронной машине изменяет величину и направление магнитного потока, в отличие от асинхронной машины, у которой Магнитный поток
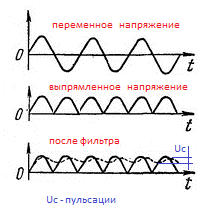
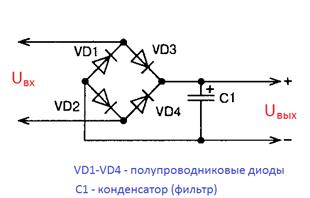
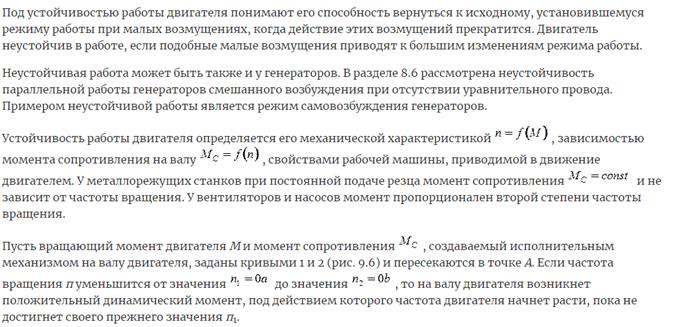
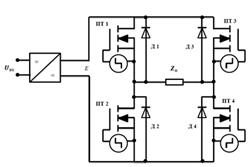
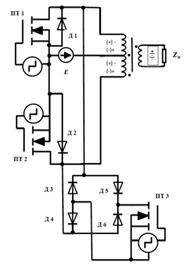
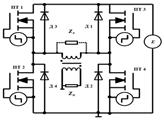
Билет 7 Вопрос 1 Преобразование переменного тока в постоянный и постоянного в переменный Процесс получения из переменного тока постоянного называется выпрямлением, а устройства – выпрямителями. Основная деталь выпрямителя – полупроводниковый диод, проводящий ток только в одном направлении. В результате выпрямления получается пульсирующий ток, меняющий со временем свою величину, но не изменяющий знак. Затем пульсации устраняют при помощи фильтров, простейшим из них является конденсатор. Полностью пульсации устранить невозможно, а их конечный уровень зависит от схемы выпрямителя и качества фильтра. Сложность и стоимость выпрямителей зависит от величины пульсаций на выходе и от максимальной мощности на выходе. Для преобразования в переменный ток используются инверторы. Принцип их работы состоит в генерации переменного напряжения с формой, максимально приближенной к синусоидальной. Что бы получить такую форму достаточно подключить аккумулятор к потребителю сначала одной полярностью, а затем через короткий промежуток отключить аккумулятор, а потом снова подключить, но уже обратной полярностью. И такие переключения повторять все время через равные промежутки времени. Если выполнять таких переключений 50 раз за секунду, то на потребитель будет подаваться переменное напряжение частотой 50 Гц. Роль переключателей чаще всего выполняют транзисторы или тиристоры, работающие в ключевом режиме. Пример такого устройства – автомобильный инвертор для подключения к бортовой сети бытовых приборов или инструмента. Чем качественнее и дороже инвертор, тем больше его мощность или точнее выдаваемое им напряжение приближается к синусоиде. Выделяют три основные схемы инверторов напряжения: · Мостовой ИН без трансформатора (инвертор) · · С нулевым выводом трансформатора (инвертор) · · Мостовая схема с трансформатором (Инвертор)
· Диодный мост для выпрямления тока
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 414; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.244.44 (0.099 с.) |

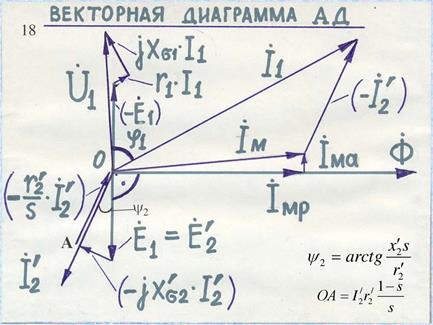

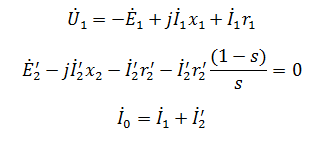 На основании этих уравнений выполняется построение векторной диаграммы асинхронного двигателя
На основании этих уравнений выполняется построение векторной диаграммы асинхронного двигателя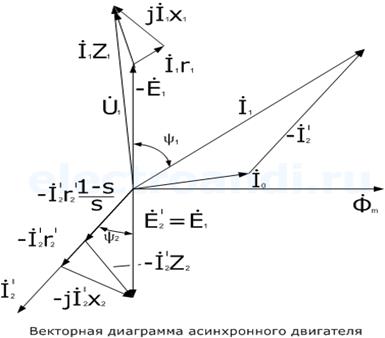
 так как
так как  . При этом I1 останется прежним по фазе и величине, что не повлияет на потребляемую из сети мощность. Поскольку I1 и I2 не изменятся, то потери в первичных и вторичных цепях также не изменятся, соответственно мощность тоже не будет изменяться, а мощность развиваемая двигателем при вращении, будет равна мощности, потребляемой в добавочном сопротивлении
. При этом I1 останется прежним по фазе и величине, что не повлияет на потребляемую из сети мощность. Поскольку I1 и I2 не изменятся, то потери в первичных и вторичных цепях также не изменятся, соответственно мощность тоже не будет изменяться, а мощность развиваемая двигателем при вращении, будет равна мощности, потребляемой в добавочном сопротивлении 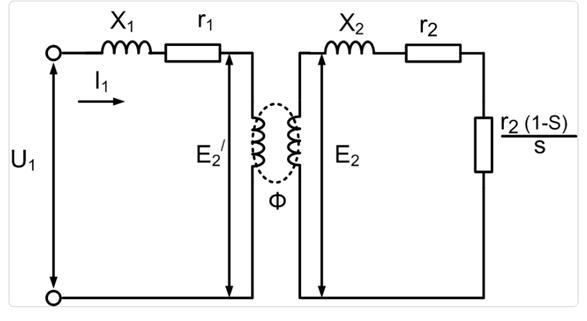


 - число пар полюсов машины.
- число пар полюсов машины.
 , неподвижной относительно статора, а две обмотки ротора – в ортогональной системе координат d, q, неподвижной относительно ротора.
, неподвижной относительно статора, а две обмотки ротора – в ортогональной системе координат d, q, неподвижной относительно ротора.
 – активное сопротивление одной фазы статора (ротора),
– активное сопротивление одной фазы статора (ротора),  - потокосцепления соответствующих индексам обмоток.
- потокосцепления соответствующих индексам обмоток. где индекс i принимает значения
где индекс i принимает значения  2d, 2q, соответствующие индексам обмоток.
2d, 2q, соответствующие индексам обмоток.
 Здесь для собственных и взаимных индуктивностей обмоток принято одинаковое обозначение с подстрочным индексом, первая часть которого i=
Здесь для собственных и взаимных индуктивностей обмоток принято одинаковое обозначение с подстрочным индексом, первая часть которого i=  .
. ,поэтому можно записать
,поэтому можно записать 
 где
где  определяются формулами (2.6).
определяются формулами (2.6).
 Уравнения электрического равновесия (2.7) в сочетании с уравнением электромагнитного момента (2.8) представляют собой математическое описание динамического процесса преобразования энергии, которое в дальнейшем будет конкретизировано для наиболее используемых разновидностей электродвигателей. В обобщенной форме это описание принимает следующий вид: Уравнение электромагнитного момента можно упростить, подставив в (2.9) выражения для собственных и взаимных индуктивностей обмоток (2.6):
Уравнения электрического равновесия (2.7) в сочетании с уравнением электромагнитного момента (2.8) представляют собой математическое описание динамического процесса преобразования энергии, которое в дальнейшем будет конкретизировано для наиболее используемых разновидностей электродвигателей. В обобщенной форме это описание принимает следующий вид: Уравнение электромагнитного момента можно упростить, подставив в (2.9) выражения для собственных и взаимных индуктивностей обмоток (2.6): 
 , а, следовательно, и от времени t, уравнение (2.7) после дифференцирования по времени преобразуется к виду:
, а, следовательно, и от времени t, уравнение (2.7) после дифференцирования по времени преобразуется к виду:  где
где  - угловая скорость вала двигателя.
- угловая скорость вала двигателя. , вызванную изменениями токов в обмотках, а третий член отражает взаимодействие механической и электрической частей электропривода и представляет собой результирующую ЭДС, наведенную в обмотке в результате механического движения ротора машины.
, вызванную изменениями токов в обмотках, а третий член отражает взаимодействие механической и электрической частей электропривода и представляет собой результирующую ЭДС, наведенную в обмотке в результате механического движения ротора машины.
 и на этот же угол поворачивается физическая нейтраль. Так как при одинаковом направлении вращения, направление тока якоря двигателя и генератора разное, то направление магнитного поля якоря и смещение физической нейтрали в этих режимах будет противоположеным. В режиме генератора нейтраль смещается в сторону вращения, а в режиме двигателя – против вращения.
и на этот же угол поворачивается физическая нейтраль. Так как при одинаковом направлении вращения, направление тока якоря двигателя и генератора разное, то направление магнитного поля якоря и смещение физической нейтрали в этих режимах будет противоположеным. В режиме генератора нейтраль смещается в сторону вращения, а в режиме двигателя – против вращения.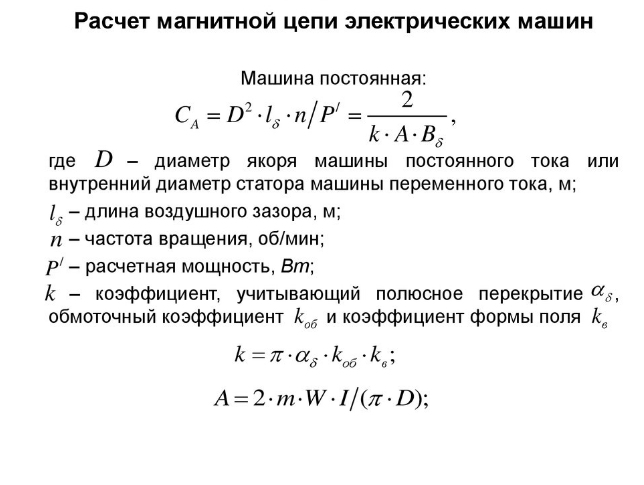
 относительно геометрической нейтральной линии. При изменении нагрузки индукция поля якоря изменяется, изменяется и угол
относительно геометрической нейтральной линии. При изменении нагрузки индукция поля якоря изменяется, изменяется и угол 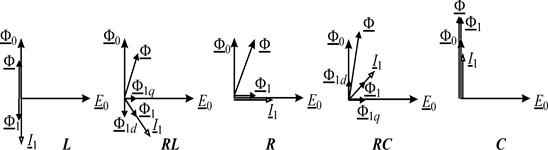 Рассмотрим этот процесс на примере синхронного генератора. Изобразим вращающееся магнитное поле ротора вектором
Рассмотрим этот процесс на примере синхронного генератора. Изобразим вращающееся магнитное поле ротора вектором  . При вращении оно пересекает неподвижные проводники обмоток статора и наводит в них ЭДС
. При вращении оно пересекает неподвижные проводники обмоток статора и наводит в них ЭДС  , отстающую от потока
, отстающую от потока  . Ток статора
. Ток статора  создает магнитный поток статора
создает магнитный поток статора  , совпадающий с ним по направлению. В зависимости от характера нагрузки ток статора может иметь фазовый сдвиг по отношению к ЭДС
, совпадающий с ним по направлению. В зависимости от характера нагрузки ток статора может иметь фазовый сдвиг по отношению к ЭДС  .
. оказывается смещенным относительно потока ротора
оказывается смещенным относительно потока ротора  и поперечную
и поперечную  составляющие. Продольная составляющая будет оказывать при RL нагрузке размагничивающее действие, а при RC нагрузке – подмагничивающее. Поперечная составляющая будет вызывать деформацию поля, аналогичную деформации при активной нагрузке.
составляющие. Продольная составляющая будет оказывать при RL нагрузке размагничивающее действие, а при RC нагрузке – подмагничивающее. Поперечная составляющая будет вызывать деформацию поля, аналогичную деформации при активной нагрузке. . Негативное влияние реакции якоря в синхронных машинах снижают увеличением рабочего зазора.
. Негативное влияние реакции якоря в синхронных машинах снижают увеличением рабочего зазора. . Так как поток
. Так как поток  , то эту ЭДС можно представить в комплексной форме через некое индуктивное сопротивление в виде
, то эту ЭДС можно представить в комплексной форме через некое индуктивное сопротивление в виде  .
.
 (я бы не советовал их все рисовать, но накидать что-то если что сможете)
(я бы не советовал их все рисовать, но накидать что-то если что сможете)