Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Частотные характеристики. Ачх, фчх, вчх, мчх, афх, лачх.
Важными динамическими характеристиками объекта являются его частотные характеристики, которые определяют взаимосвязь между параметрами периодических сигналов на входе и выходе. Используются для описания одноканальных объектов: Если на вход объекта подавать гармонический сигнал заданной амплитуды A1 и частоты
то на выходе тоже будет гармонический сигнал той же частоты, но другой амплитуды и со сдвигом по фазе:
Для нахождения соотношения между входным и выходным гармоническими сигналами можно воспользоваться передаточной функцией (1), из которой формальной заменой p на
Ее можно представить в виде:
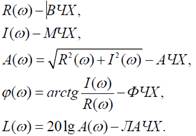
Составляющие обобщенной частотной характеристики имеют самостоятельное значение и следующие названия:
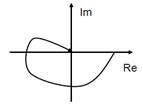
Для исследования частотных свойств объекта или системы удобно использовать графическое представление частотных характеристик. В этом случае обобщенная частотная характеристика может быть построена на комплексной плоскости. При изменении частоты ω от 0 до ∞ вектор частотной характеристики прочерчивает на комплексной плоскости кривую, которая называется амплитудно-фазовой характеристикой ( АФХ).
Наряду с амплитудно-фазовой характеристикой можно построить все остальные частотные характеристики. Так, амплитудная частотная характеристика показывает, как звено пропускает сигналы различной частоты; причем оценкой пропускания является отношение амплитуд выходного А2 и входного А1 сигналов. Фазовая частотная характеристика отражает фазовые сдвиги, вносимые системой на различных частотах.
Типовые динамические звенья. Временные и частотные характеристики типовых динамических звеньев. Для расчета различных САУ их обычно разбивают на отдельные элементы, динамическими характеристиками которых являются дифференциальные уравнения не выше второго порядка. Причем различные по своей физической природе элементы могут описываться одинаковыми дифференциальными уравнениями, поэтому их называют типовыми звеньями. Изображение системы в виде совокупности типовых звеньев с указанием связей между ними называется структурной схемой. Она может быть получена на основе как дифференциальных уравнений, так и передаточных функций. Данный способ и составляет суть структурного метода.
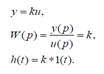
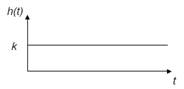
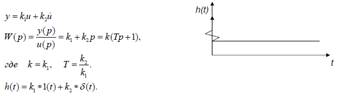
Пропорциональное звено
Безынерционные усилители, механические редукторы Дифференцирующее звено
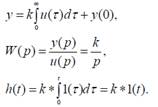
Тахогенератор постоянного тока Интегрирующее звено
Операционный усилитель Апериодическое звено
Различного рода двигатели Форсирующее звено
По сути, это сумма пропорционального и дифференцирующего звеньев. Звено с запаздыванием
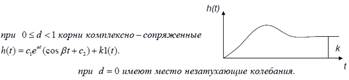
Звено 2-го порядка
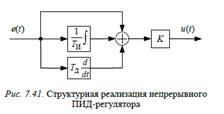
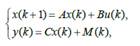
Двигатель постоянного тока, если вход - напряжение якорной цепи, выход – скорость вращения и учитываются как постоянная времени цепи якоря, так и электромеханическая постоянная. Синтез систем автоматического управления. Метод пропорционально –интегрально - дифференциального (ПИД) регулирования. Уравнение непрерывного ПИД - регулятора. Структурная схема замкнутой системы с ПИД- регулятором. Задача синтеза Объект управления, для которого будем рассматривать синтез цифрового регулятора, описывается системой разностных уравнений
где M (k) – возмущение, приложенное к выходу объекта, что при синтезе является наиболее неблагоприятным случаем. После окончания переходного процесса выход объекта должен повторять входное задающее воздействие
В некоторых системах допускается воспроизводить входное задающее воздействие с ошибкой, но величина ошибки должна быть не больше заданной
Кроме требований статики (7.40), (7.41), предъявляются требования и к динамике системы. Время переходного процесса должно быть не более заданного:
Вид (качество) переходного процесса должен соответствовать предписанному, при этом часто задается величина перерегулирования
По заданным требованиям к системе необходимо определить структуру и параметры регулятора. До начала процедуры синтеза следует проверить управляемость и наблюдаемость объекта. Эти понятия мы уже ввели для непрерывных систем (см. главу 5) и здесь будем использовать те же обозначения. Убедимся, однако, что доказывать критерии для импульсных систем много проще. ПИД В инженерной практике систем с обратной связью широкое распространение получили так называемые ПИД-регуляторы (пропорциональный – интегрирующий – дифференцирующий)
Непрерывная реализация ПИД-регулятора описывается уравнением
П: увеличение К уменьшает ошибку воспроизведения входа (ухуд запас устойч), И: выполняет ф-цию накапливания и подавления стат ошибки (чем меньше Ти, тем быстрее интеграл состав парирует ошибку), Д: ф-ция улучшения динамич св-в – (вида перех хар-ки системы)
Структурные схемы. Элементы структурных схем. Правила преобразования и переноса. Построение структурных схем по дифференциальным уравнениям. Первая каноническая форма. Вторая каноническая форма.
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-06; просмотров: 3786; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.58.216.18 (0.008 с.) |
 , n
, n  .
. ,
,

 получим обобщенную частотную характеристику:
получим обобщенную частотную характеристику:








 :
: