Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Структура и геометрия манипуляторов
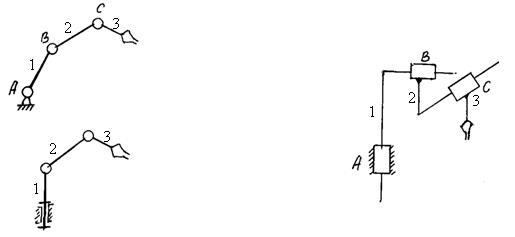
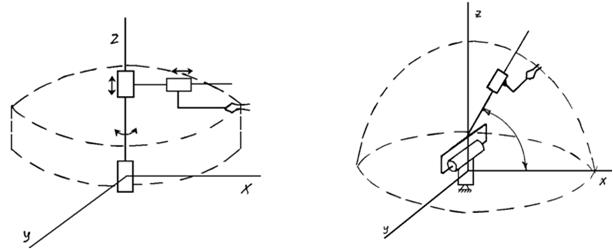
Движения, совершаемые человеком и воспроизводимые роботом, можно разделить на три класса: глобальные, региональные, локальные. Глобальные движения – это перемещения на расстояния, превышающие размеры робота, например, перемещение робота по монорельсу для обслуживания группы станков. Движения, совершаемые рукой робота в пределах его рабочей зоны, называются региональными, или переносными, так как они обеспечивают перенос объекта в требуемую точку. Локальные движения – это перемещения, соответствующие движениям кисти руки. Основное назначение – ориентирование объекта манипулирования, поэтому их также называют ориентирующими. Пространственный манипулятор в общем случае должен иметь шесть степеней подвижности, три для отработки региональных (переносных) движений и три – для локальных (ориентирующих). Для промышленных роботов обычно оказывается достаточным для выполнения рабочих операций 4 –5 степеней (3 переносных и 1 – 2 ориентирующих). Простейшие, не перепрограммируемые роботы, называемые автооператорами, могут иметь 1 –2 степени подвижности. Кинематическая цепь региональных движений обычно содержит три звена и три кинематические пары V класса (вращательных (В) и поступательных (П)) и носит название руки. Возможны следующие расположения кинематических пар (рисунок 1.26) ВВВ,ВВП,ВПВ,ПВВ,ППВ,ПВП, ВПП, ППП. Оси соседних кинематических пар могут иметь самое различное относительное расположение, поэтому схемы манипуляторов весьма разнообразны. Одной из простейших схем является схема ППП (рисунок 1.26) с прямоугольной системой координат, форма ее рабочей зоны – параллелепипед. Такая схема наиболее удобна для выполнения прямолинейных движений. Применяется в станках с ЧПУ. В настоящее время наибольшее распространение получили манипуляторы ВПП с цилиндрической системой координат (рисунок 1.27). Рабочее пространство имеет форму цилиндра или его части. Рука может осуществлять движения по горизонтали и вертикали, и поворот вокруг оси колонны. Такую схему имеют обычно транспортные роботы.
ВВВ ППП Рисунок 1.26
Манипулятор исполнения ВВП имеет сферическую систему координат, его рабочее пространство – сферический сегмент (рисунок 1.28). Такие манипуляторы сложнее, чем с цилиндрической, однако, компактнее, обслуживают большой объем. Имеют повышенную жесткость, что позволяет использовать при повышенных нагрузках, например, при точечной сварке.
Рисунок 1.27 Рисунок 1.28
Манипулятор исполнения ВВВ имеет сложную сферическую систему координат (рисунок 1.29). Он называется ангулярным, шарнирным или антропоморфным. Имеет значительно меньшие габариты, чем у ППП при большей зоне обслуживания. Может применяться в стесненной зоне обслуживания. Каждая их рассмотренных схем обладает определенными достоинствами и недостатками, поэтому выбор схемы является компромиссным решением и ведется с учетом предъявляемых к данному роботу разнообразных требований. Нет такой схемы робота, которая была бы оптимальной во всех случаях – для каждой задачи нужно искать наилучшую компоновку. Кинематическая цепь, реализующая локальные движения называется кистью робота. Назначение – выполнять ориентирующие движения. Для удержания объекта манипулирования кисть снабжается захватным устройством. Назначение переносных и ориентирующих движений - поместить захватное устройство в любую точку рабочей зоны. Рабочей зоной (зоной обслуживания) называется часть рабочего объема манипулятора, в которой можно выполнять данную операцию, характеризуемую расположением захвата по отношению к объекту манипулирования. Для каждой точки рабочего объема манипулятора можно определить некоторый телесный угол ψ, внутри которого захват можно подвести к этой точке. Этот угол называется углом сервиса (рисунок 1.30).
Отношение
Качество манипулятора в отношении возможностей выполнения различных операций оценивается средней величиной коэффициента сервиса θср в рабочем объеме V, который называется полным коэффициентом сервиса манипулятора.
Под маневренностью манипулятора понимается его число степеней свободы при неподвижном захвате. Одну степень маневренности имеет манипулятор со сферическими парами (m = 1), у которого при неподвижном захвате его звенья могут вращаться вокруг оси, проходящей через центры сферических пар, т.е. как бы «ометают» некоторый объем. В манипуляторах с одноподвижными кинематическими парами маневренность равна нулю m = 0, т.е. каждому положению захвата соответствует единственное расположение всех звеньев. Маневренность зависит не только от числа степеней свободы захвата, но и от расположения сферических пар. Повышение маневренности манипулятора позволяет выполнять движения более высоких классов, которые подразделяются на четыре класса. К первому классу относится движение в свободном рабочем объеме (рисунок 1.31, а). Ко второму – движение в несвободном пространстве, при котором часть рабочего объема занята некоторым твердым телом (рисунок 1.31, б). К третьему классу относятся движения, при которых точка захвата перемещается по заданной плоской или пространственной кривой (рисунок 1.31, в). К четвертому классу относятся движения, совершаемые в несвободном пространстве при несвободном объекте манипулирования (рисунок 1.31, г).
а) б) в) г) Рисунок 1.31
|
||||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 398; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.80.39 (0.006 с.) |
 Телесный угол это часть пространства, ограниченная прямыми, проведенными из одной точки (S) ко всем точкам какой либо замкнутой кривой. Мерой телесного угла является площадь, вырезаемая телесным углом на сфере единичного радиуса с центром в вершине. Максимальное значение телесного угла равно 4π.
Телесный угол это часть пространства, ограниченная прямыми, проведенными из одной точки (S) ко всем точкам какой либо замкнутой кривой. Мерой телесного угла является площадь, вырезаемая телесным углом на сфере единичного радиуса с центром в вершине. Максимальное значение телесного угла равно 4π. называется коэффициентом сервиса в данной точке. Значение этого коэффициента может меняться от 0 для точек на границе рабочего объема до 1 для точек зоны полного сервиса (схват совершает полное сферическое движение вокруг данной точки).
называется коэффициентом сервиса в данной точке. Значение этого коэффициента может меняться от 0 для точек на границе рабочего объема до 1 для точек зоны полного сервиса (схват совершает полное сферическое движение вокруг данной точки). .
.