
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Маневрування ресурсами та інтенсивностями.Стр 1 из 4Следующая ⇒
Основні фактори, що визначають ступінь інерційності. Фактор часу. Для опису впливу цього фактора потрібно розглянути весь процес прийняття і реалізації рішення. На першій стадії ведуться передпланові розробки, планові рішення підготовлюються до прийняття. На цій стадії, якщо знехтувати часом розробки якогось варіанта, в зв’язку з змінними умовами майбутнього функціонування системи існує вибір будь-якого нового оптимального базису, маневреність в цьому сенсі ніяк не обмежена по часу. На другій стаді рішення узгоджуються в всіх підсистемах даної системи, приймаються і перетворюються в твердження економічної системи. Припустимо, що зміна умов майбутнього функціонування локальної системи виявились тільки тепер. До цього часу почалась часткова настройка економічної системи з її багаточисельними внутрішніми взаємозв’язками на певний режим, відповідний вихідному плану. Зміна складу об'єктів і способів їх функціонування на даній стадії вже вимагатиме досить великого часу для переходу з одного режиму на інший (від плану до х°). Цей час складається принаймні з часу на прийняття рішення про цілеспрямованість такої зміни, часу розробки, погодження та затвердження нового плану, а також часу на довгу відстань економічної системи (мінімально необхідну для того, щоб створити передумови для початку виконання нового плану системи). Час на прийняття нового рішення, як і час узгодження планів, пере настроювання системи на новий режим, можна, звичайно, зменшити за рахунок вдосконалення процедур планування і прийняття рішень. Але в будь-якому випадку в результаті виникає якийсь кінцевий час переходу з одного стану в інший. Якщо цей час більше або дорівнює прийнятому горизонту планування (Т '> Т), то початковий базис оптимального плану в межах розглянутого періоду розширитися не може. При інших співвідношеннях Т 'і Т можлива часткова зміна оптимального базису вихідного плану на відрізку [0, T]. Нарешті, якщо зміна умов майбутнього функціонування плану відбувається, коли вже розпочато реалізацію вихідного плану, то практично вся реалізована частина базису повинна бути в новий базис. Крім того, система до цього часу вже в тій чи іншій мірі увійшла в певний режим функціонування, і час на його переналагодження істотно збільшиться.
Алгоритм ігрового підходу. Допустимо, що проектувальнику відомо, що потреба в першому пункті полягає у відрізку 5. Перевіримо випуклість функції виграшу. При фіксуючому
6. Визначаємо ціну гри і оптимальні стратегії другого гравця:
Вичислимо вн. максимум: Чиста оптимальна стратегія і знаходитись з рівняння: Ціна гри звідси рівна 7. Очевидно, що суттєвими стратегіями першого гравця будуть
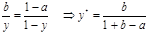
8. Знайдемо розподіл ймовірностей з рівняння: Звідси матимемо, що Величина b-a в оптимальних стратегіях гравців відображає втрати в ефективності функціонування системи, викликані неповнотою знань про умови її роботи. Оптимальна стратегія проектувальника може інтерпретуватися наступним чином. Якщо відомо, що наприклад, що потреби в п.1 можуть коливатися від 30 до 60% сумарних потреб п-ції, тобто а=0,3, b=0,6, то проектувальник повинний помістити в цьому пункті 0,6/(1+0,6-0,3)=0,46, тобто 46% вир.потужностей. Коеф.напруженості роботи, визначений ціної гри, буде 1+0,6-0,3=1,3, а найменш сприятливий збіг обставин, який проявляється в появі макс потреби в першому пункті, з’явиться з ймовірністю а*=(1-0,3)/(1+0,6-0,3)=0,54. маневрування ресурсами та інтенсивностями. Існує широка гама можливостей маневрування: ресурсами; продукцією; способами функціонування; інтенсивностями способів.По кожному з перелічених напрямків можливі два способи маневрування: зміна об’ємних характеристик іорганізація взаємозаміни у межах наявних можливостей.Чим вища міра маневреності, тим ширша можливість отримання еластичного плану. У одноперіодичній задачі із незмінним періодом [0, Т] знання граничних прискорень дозволяє встановити гранично можливі прирости інтенсивностей і об’ємів використовуваних ресурсів в економічній системі при використанні того або іншого способу, тобто встановити
Граничні значення приросту інтенсивностей 16. Умови маневрування Реальна міра маневреності плану обмежується балансом ресурсів і продукції. Це означає, що при зміні умов виконання плану, наприклад, при недопоставці частини ресурсів, можливості маневрування обмежені ресурсними та іншими припущеннями. Збільшення інтенсивностей по будь-яким об’єктам не повинно перевищувати гранично можливих значень
18. Найпростіша постановка задачі знаходження оптимального плану в умовах маневреності.
Найпростіша задача опт. плану з урах. маневреності:
Тоді: Задачі зводяться до наборів таких обєктів, які при виконанні всіх ресурсних та інших обмежень утворюють деякий запас маневреності системи на випадок можливої зміни умов виконання плану. 19. Узагальнена постановка задачі оптимізації планів в умовах маневреності Припустимо, що система допускає можливість маневрування при змінах умов реалізації її плану. Тому необхідно сформувати такий базовий план, який буде орієнтований на визначені поставки ресурсів, проте одночасно допускає можливість його коректування з врахуванням реальних умов, найважливішими з яких є умови маневреності. Окрім цього всі можливі корективи повинні задовольняти нормі еластичності. Під нормативним заданням еластичності в загальному випадку може прийматися задання системи К функцій виду:
Так, в рамках моделі це означає, що для прийняття плану х0 і його коригувань хh ( M(x0, xh)=0,
20. Алгоритм знаходження оптимального еластичного плану 1. Для 2. Вибирається множина 3. Кожному плану а) Будь-який план б) умови маневрування дозволяють скорегувати будь-який план 4. Знаходиться об'єднання тобто всіх планів, допустимих при нульовому рівні недопоставок і які допускають коригування для 5. Знаходиться перетин Він включає всі допустимі при нульовому рівні недопоставок плани Продовження алгоритму можливе, наприклад, за такою схемою. 6. Для кожного плану 7. Для всіх коригувань 8. В якості коригування плану 9. Для кожного 10. В якості оптимального еластичного плану береться такий план 21. Способи виявлення оптимальної напруженості планів Існують два способи виявлення оптимальної напруженості планів. Суттю першого способу є те, що для заданого об’єму заходу, посередництвом резервування, підвищення еластичності планів і інше вибирається такий об’єм планового завдання, який відповідав би оптимуму надійності і одночасно напруженості плану. В другому способі при заданому плановому завданні можна встановити такі об’єми засобів резервування, підвищення еластичності планів, підвищення їх маневрених властивостей, які відповідали б оптимуму напруженості. Описане дозволяє говорити про те, що при оцінці напруженості планів через їх надійність враховується широка сукупність факторів, які дійсно впливають на напруженість планових завдань. В цілому це фактори збалансованості виділених ресурсів з встановленим плановим завданням в умовах, коли мірою збалансованості являється надійність планів. Визначені реалізаційні труднощі виникають внаслідок необхідності оцінити ймовірність поставок різного роду ресурсів в різних об’ємах і ймовірність формування тих чи інших витратних коефіцієнтів по ресурсах. Але ці трудності можна подолати. Можна використати метод експертних оцінок цих ймовірностей, метод їх укрупненої статистичної оцінки, і отримати статистичні закономірності розподілу ймовірностей. Якщо напруженість плану по випуску k - ої продукції складає
Напруженість плану по валовому випуску продукції становить:
22. Оптимальна стратегія проектування Для ілюстрації принципово іншого підходу до оцінки напруженості плану розглянемо розподіл виробничих потужностей в умовах часткової невизначеності. Нехай x - виробництво підприємства в одному з пунктів, а y – потреба в цьому ж пункті. Тоді напруженість плану роботи підприємства може бути виміряна відношенням x/y. Критерієм розподілу потужностей являється мінімізація максимальної напруженості роботи обох підприємств. В даному випадку – планування випуску продукції на двох підприємствах. Допустимо, що проектувальнику відомо, що потреба в першому пункті полягає у відрізку 1. Перевіримо випуклість функції виграшу. При фіксуючому
2. Визначаємо ціну гри і оптимальні стратегії другого гравця: 3. Очевидно, що суттєвими стратегіями першого гравця будуть
4. Знайдемо розподіл ймовірностей з рівняння:
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-07-16; просмотров: 219; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.226.4.239 (0.042 с.) |
 ,
,  . Таким чином, множиною стратегій першого гравця є
. Таким чином, множиною стратегій першого гравця є  . Тому і проектуючи потужність повинна лежати в тих же межах. Тому ця гра на квадраті
. Тому і проектуючи потужність повинна лежати в тих же межах. Тому ця гра на квадраті  *
*  і її можна розглядати по такій же схемі, що й ігри на одиничному квадраті:
і її можна розглядати по такій же схемі, що й ігри на одиничному квадраті: функція виграшу набуває такого вигляду:
функція виграшу набуває такого вигляду: 
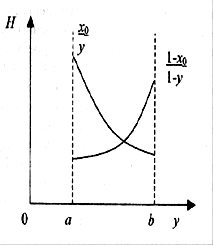 а її графік являє собою верхню опуклу дугу пари гіпербол
а її графік являє собою верхню опуклу дугу пари гіпербол

 повинна забезпечувати мін
повинна забезпечувати мін 
 .
. . Для них виконується:
. Для них виконується: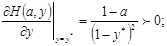

 і
і  . Причому, як і раніше
. Причому, як і раніше

 =
=  Аналогічно, якщо лімітуючою ланкою виявляється маневреність за ресурсом, то не зможе бути реалізована гранична маневренність за інтенсивностями і виконається рівність
Аналогічно, якщо лімітуючою ланкою виявляється маневреність за ресурсом, то не зможе бути реалізована гранична маневренність за інтенсивностями і виконається рівність  , де
, де  Таким чином, постановка задачі, що характеризується, базується на тому, що для кожного технологічного способу встановлюється або
Таким чином, постановка задачі, що характеризується, базується на тому, що для кожного технологічного способу встановлюється або  визначуване можливостями поглинання приросту ресурсу в даній системі.
визначуване можливостями поглинання приросту ресурсу в даній системі.
 =
= 
 . При цьому необхідно, щоб інтенсивності по іншим способам зменшувалися. Стратегії маневрування, задовольняють ресурсним обмеженням, формуються процедурами отримання еластичних планів. Але ці стратегії можна отримати і за іншою схемою формування еластичності плану. При переході від рішення h-го кроку
. При цьому необхідно, щоб інтенсивності по іншим способам зменшувалися. Стратегії маневрування, задовольняють ресурсним обмеженням, формуються процедурами отримання еластичних планів. Але ці стратегії можна отримати і за іншою схемою формування еластичності плану. При переході від рішення h-го кроку  до вирішення (h -1)-го кроку
до вирішення (h -1)-го кроку  можлива наступна стратегія. Обчислимо мінімальний приріст витрат:
можлива наступна стратегія. Обчислимо мінімальний приріст витрат:  При цьому повинні бути виконані додаткові умови: - приріст випуску продукції не повинен бити менший того, який задається характеристикою еластичності, тобто зміною випуску продукції к-го виду:
При цьому повинні бути виконані додаткові умови: - приріст випуску продукції не повинен бити менший того, який задається характеристикою еластичності, тобто зміною випуску продукції к-го виду:  , затрати додаткових ресурсів не повинні бути більшими заданого приросту по кривій еластич-ності, тобто зміни забезпеченості ресурсом і-го виду:
, затрати додаткових ресурсів не повинні бути більшими заданого приросту по кривій еластич-ності, тобто зміни забезпеченості ресурсом і-го виду:  , на будь-якому кроці для
, на будь-якому кроці для  виконується умова маневрування:
виконується умова маневрування:  Це відноситься як для від’ємних так і для додатних значень
Це відноситься як для від’ємних так і для додатних значень  означає як швидкість використання ресурсів так і швидкість випуску продукції, тому що ця величина залежить від одиниці часу. Нехай
означає як швидкість використання ресурсів так і швидкість випуску продукції, тому що ця величина залежить від одиниці часу. Нехай  , при зміні будь-яких умов реалізації плану можуть змінюватись і використання ресурсів і інтенсивність випуску продукції. Якщо цю зміну характеризувати через прискорення то таку залежність можна представити співвідношенням:
, при зміні будь-яких умов реалізації плану можуть змінюватись і використання ресурсів і інтенсивність випуску продукції. Якщо цю зміну характеризувати через прискорення то таку залежність можна представити співвідношенням:  . Ввівши нові позначення отримаємо:
. Ввівши нові позначення отримаємо:  , де
, де  ,
,  ,
,  - показники, що виражають прискорення даної системи маневреності при використанні і – го ресурсу j –им способом.
- показники, що виражають прискорення даної системи маневреності при використанні і – го ресурсу j –им способом. ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , Цільова функція передбачає мінімізацію витрат, перше обмеження – обмеження на випуск продукції, друге обмеження – обмеження на поставки ресурсів,
, Цільова функція передбачає мінімізацію витрат, перше обмеження – обмеження на випуск продукції, друге обмеження – обмеження на поставки ресурсів,  - норма маневреності. Якщо на якійсь ділянці цієї залежності допустити лінійну залкжність маневреності
- норма маневреності. Якщо на якійсь ділянці цієї залежності допустити лінійну залкжність маневреності 
 ,
,  ,
,  ,
, 
 - вектор недопоставок ресурсів в порівнянні з плановим,
- вектор недопоставок ресурсів в порівнянні з плановим,  - мінімально допустимий об’єм випуску к-го продукту. Вимоги виконання нормативної еластичності можуть бути представлені так:
- мінімально допустимий об’єм випуску к-го продукту. Вимоги виконання нормативної еластичності можуть бути представлені так:  ,
,  ,
,  назвемо h-м рівнем недопоставок, а відповідний йому вектор-стовпець (
назвемо h-м рівнем недопоставок, а відповідний йому вектор-стовпець ( ) – h-рівнем норми еластичності. Розглянемо основні питання формування оптимального еластичного плану на мові наступної оптимізаційної задачі:
) – h-рівнем норми еластичності. Розглянемо основні питання формування оптимального еластичного плану на мові наступної оптимізаційної задачі: 

 де х - шуканий вектор оптимального стану системи; Припустимо, що економічною системою, яка розглядається, прийнято деякий план х0. Будемо вважати, що він розрахований на постійне постачання ресурсів (тобто ΔS =0). Цей план не обов'язково оптимальний, але перераховані вище умови можна записати так:
де х - шуканий вектор оптимального стану системи; Припустимо, що економічною системою, яка розглядається, прийнято деякий план х0. Будемо вважати, що він розрахований на постійне постачання ресурсів (тобто ΔS =0). Цей план не обов'язково оптимальний, але перераховані вище умови можна записати так: ,
,  ,
,  ,
, 
 ) співвідношення повинні бути доповненими умовами допустимості коректування плану х0 на xh, тобто умовами маневреності. У найбільш загальному випадку можна записати:
) співвідношення повинні бути доповненими умовами допустимості коректування плану х0 на xh, тобто умовами маневреності. У найбільш загальному випадку можна записати:
 ,
, 
 -го рівня недопоставок (для кожного
-го рівня недопоставок (для кожного  ) формується відповідна нормі еластичності система обмежень
) формується відповідна нормі еластичності система обмежень  .
. всіх допустимих щодо системи планів.
всіх допустимих щодо системи планів. ставиться у відповідність множина планів
ставиться у відповідність множина планів  кожен з яких задовольняє умови:
кожен з яких задовольняє умови: допустимий при нульових недопоставках;
допустимий при нульових недопоставках; в допустимий з рівнем недопоставок
в допустимий з рівнем недопоставок  .
. всіх
всіх 
 множин
множин  .
. , кожен з яких допускає коригування для будь-якого рівня недопоставок
, кожен з яких допускає коригування для будь-якого рівня недопоставок  . Якщо множина
. Якщо множина  знаходиться значення функціоналу, яке позначимо через
знаходиться значення функціоналу, яке позначимо через  . Організуємо цикл по
. Організуємо цикл по  .
. плану
плану  .
. такий, що
такий, що  .
. підраховується середнє значення:
підраховується середнє значення: 
 що
що  .
. , то напруженість плану випуску продукції в цілому складає
, то напруженість плану випуску продукції в цілому складає причому
причому  або
або 

 ,
,  . Таким чином, множиною стратегій першого гравця є
. Таким чином, множиною стратегій першого гравця є  *
*  і її можна розглядати по такій же схемі, що й ігри на одиничному квадраті:
і її можна розглядати по такій же схемі, що й ігри на одиничному квадраті: а її графік являє собою верхню опуклу дугу пари гіпербол (рис.1)
а її графік являє собою верхню опуклу дугу пари гіпербол (рис.1)
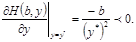
 Вичислимо внутрішній максимум:
Вичислимо внутрішній максимум:  Чиста оптимальна стратегія
Чиста оптимальна стратегія  Ціна гри звідси рівна
Ціна гри звідси рівна  .
. . Для них виконується:
. Для них виконується:

 Звідси матимемо, що
Звідси матимемо, що  Величина b-a в оптимальних стратегіях гравців відображає втрати в ефективності функціонування системи, викликані неповнотою знань про умови її роботи.
Величина b-a в оптимальних стратегіях гравців відображає втрати в ефективності функціонування системи, викликані неповнотою знань про умови її роботи.


