Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Схема системы управления силовым преобразователем
Реверсивный преобразователь содержит два комплекта вентилей. Второй комплект предназначен для того, чтобы изменять направление тока. Мгновенно обеспечить реверс невозможно.
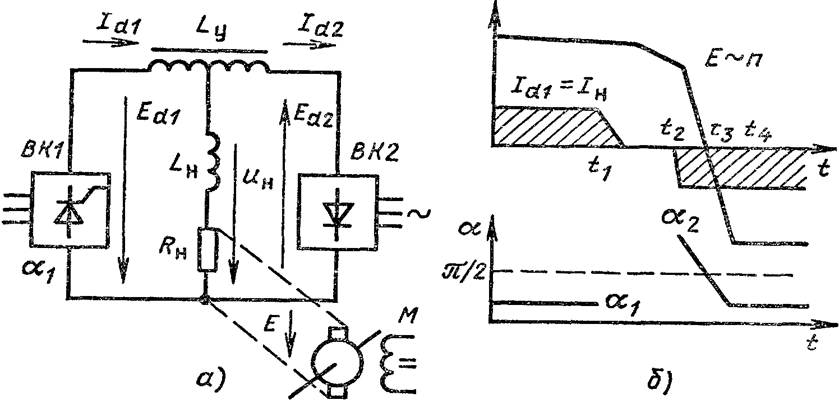
Рисунок 5.2.8.1 - Структурная схема двухкомплектного реверсивного преобразователя (а) и диаграммы токов, напряжения на нагрузке и углов управления при реверсе (б) В реверсивных управляемых выпрямителях используются два основных принципа управления комплектами выпрямителей: совместное и раздельное. Суть раздельного управления состоит в том, что импульсы управления подаются только на один из комплектов выпрямителей ВК1 или ВК2, который должен в данный момент проводить ток. На второй комплект импульсы не подаются – он «закрыт». Совместное управление предусматривает подачу импульсов управления от системы фазоимпульсного управления тиристорами (СИФУ) одновременно на тиристоры выпрямителей ВК1 и ВК2. При этом один из выпрямителей работает в выпрямительном режиме и проводит ток, а другой подготовлен для работы в инверторном режиме и ток не проводит. В нашем преобразователе применяется раздельное управление вентильными комплектами. Реверс осуществляется при подаче сигналов с микроконтроллера. Чтобы произвести реверс, необходимо вначале произвести рекуперативное торможение (t1–t2): импульсы управления α1 снимаются, скорость вращения вала замедляется по инерции, а в момент t2 подаются управляющие импульсы α2. В результате второй комплект преобразователей работает в инверторном режиме, что переводит двигатель в генераторный режим. На участке t2–t3 в результате возникновения тормозного момента скорость вращения вала резко снижается до 0. В момент t3 угол управления α2 достигает граничного значения, а двигатель снова потребляет энергию из сети. С последующим снижением значения угла управления через второй преобразователь до минимального значения на интервале t3–t4 ток через нагрузку достигает номинального значения Iн. Таким образом, с переходом второго комплекта преобразователей в выпрямительный режим скорость вращения вала в обратном направлении возрастает до номинального значения.
Разработка блока питания Для питания элементов схемы необходимо разработать хорошо отфильтрованный и стабилизированный источник питания.
Таблица 5.3.1 - Потребляемый ток всех элементов схемы
Суммарный ток, потребляемый элементами микроконтроллера от источников питания, составляет Iпотр= 443 мА. В качестве источников питания будут использоваться понижающие DC/DC – преобразователи с 24В (промышленная сеть постоянного тока) до 5В и 3.3В.
Рисунок 3.1 – Схема блока питания
Конденсаторы С8-С12 и С12-С16 служат для сглаживания входного и выходного напряжения. Выберем их значение 10мкФ. Для питания микроконтроллера STM32F103ZF и MAX1702 с потребляемой мощностью P = 150*3.3 = 495 мВт используем DC/DC-преобразователь IF1203S-2W. Выходная мощность 2Вт, диапазон входных напряжений 22.8 – 25.2 В, выходное напряжение 3.3 В. Для питания цифровой части схемы с потребляемой мощностью P = 278∙5 = 1390 мВт используем DC/DC-преобразователь B2412LS-W5. Выходная мощность 5Вт, диапазон входных напряжений 9 – 36 В, выходное напряжение 5 В. Для питания АЦП с потребляемой мощностью P=15∙5=75 мВт используем DC/DC-преобразователь IE2405S-1W. Выходная мощность 1Вт, диапазон входных напряжений 22.8 – 25.2 В, выходное напряжение +5 В. Вывод: В данном разделе выпускной квалификационной работы была разработана микропроцессорная часть системы управления на базе микропроцессораSTM32F103ZF. В состав устройства также вошли: клавиатура на 8 клавиш, 10-разрядный 5-канальный АЦП, схема индикации, содержащая 3 семисегментных, схема управления ключами трехфазного мостового несимметричного выпрямителя и 3 линии внешних прерываний. Полученная система управления способна обмениваться данными с другими внешними устройствами посредством связи по интерфейсу SDIO, а также предусмотрена cвязь с периферийными устройствами по USB. Вывод В данной главе была разработана архитектура принципиальной схемы микропроцессорной системы управления электроприводом шпинделя токарного станка. Для решения данной задачи, был выбран подходящий под условия 10-ти разрядный микроконтроллер, АЦП для сбора данных с датчиков, SD-карта памяти, индикаторы и клавиатура, и другие компоненты.
|
|||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 94; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.223.123 (0.007 с.) |
|||||||||||||||||||||||||||||||||