
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Математическая модель системы мониторинга
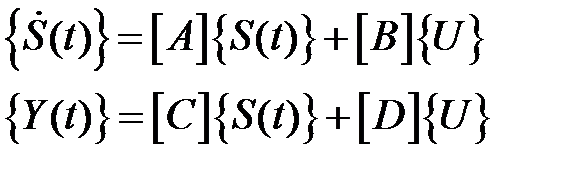
Чем больше погрешности или отклонения от номинального диапазона режимов работы, тем большие динамические нагрузки испытывает агрегат, тем больше скорость износа ответственных деталей и узлов, определяющих его остаточный ресурс, хуже техническое состояние агрегата, меньше остаточная работоспособность R (t), меньше остаточный уровень безаварийности, безопасности и безотказности P (t), больше степень старения объекта S (t). Учитывая, что пространство погрешностей { Xm } и пространство состояний { S (t)} тесно связаны между собой моделью (2.12), запишем обобщенную математическую модель системы мониторинга на основе уравнений переменных состояния в следующем виде [20, 41, 229]:
где { S (t)} – вектор функций старения агрегата размерности I, каждая составляющая которого характеризует его обобщенный (совокупный) структурный параметр, изменяющийся во времени, подлежащий оценке и характеризующий остаточный парциальный запас работоспособности и остаточный парциальный ресурс агрегата по этому обобщенному параметру;
{ Up+k (t)} – вектор входных воздействий размерности (p+k); { Yn (t)} – вектор диагностических признаков состояния объекта, получаемый функциональным преобразованием виброакустического сигнала в блоках СДМ (рис. 2.19), измеряемый системой мониторинга. Рис. 2.19 Важно отметить, что в уравнениях состояния (2.13) присутствует как сам структурный параметр, так и его первая производная, которая представляет собой скорость износа или деградации объекта. Вектор переменных управления { Up+k (t)} включает в себя переменные задания режима работы диагностируемого объекта { Up (t)} и факторы воздействия персонала при регулировке и обслуживании объекта { Uk (t)}. Вектор сигналов { Yn (t)} включает диагностические параметры вибрации, температуры, тока и т.д. – диагностические признаки, например, суммы амплитуд частотных составляющих вибрации, которые используются для диагностики. Матрицы [ А ], [ В ], [ С ], [ D ] определяются следующим образом: [ m, m ] – квадратная матрица системы [ A ] = [ aij ], которая полностью определяет состояние невозмущенной системы при u (t) = 0; [ m, (p+k)] – прямоугольная матрица управления [ B ] = [ bij ], которая определяет влияние управляющего вектора (вектора входа – режима и ремонтов агрегатов) на вектор его состояния (обобщенных погрешностей);
[ n, m ] – матрица наблюдения (матрица выхода) [ С ] = [ сij ], которая определяет наблюдаемость внутреннего состояния посредством доступного измерения вектора выхода; [ n, (p+k)] – переходная матрица [ D ] = [ dij ], которая определяет непосредственное влияние вектора входа на вектор выхода. Для вибродиагностики матрица D определяет влияние на параметры вибрации агрегата действий персонала – изменения режима работы агрегата, либо его состояния путем регулировки или ремонта, в том числе на ходу. Элементы матриц [ A ], [ С ] – элементы системы определяющих критериев неиспраностей объекта, которые чаще называют элементами диагностической матрицы. Элементы матриц [ B ], [ D ] являются коэффициентами соответствующих кривых регрессии деградации состояния составляющих объекта мониторинга, которые, как правило, показывают нелинейную взаимосвязь между измеряемыми косвенными признаками и величинами структурных параметров. Все векторы – медленно меняющиеся функции времени на интервале жизни агрегата. Система мониторинга (4) вполне управляема как производственный комплекс и наблюдаема при совпадении рангов матриц [ A ] и [ С ] и отсутствии в последней нулевых столбцов [229]. Размерность вектора { Sm (t)} (матрицы [ A ]), которая определяет степень реальной наблюдаемости состояния агрегата, рекомендуется выбирать исходя из причин и статистики отказов агрегатов каждого типа. Составляющие { Sm (t)}, как правило, недоступны для непосредственного наблюдения, что заставляет использовать методы косвенных измерений и диагностики. Отличительной особенностью предложенной обобщенной модели является то, что вектор управления { Up+k (t)} при диагностике практически поcтоянен и изменяется спорадически при пуске-останове агрегата и техобслуживании. Между этими моментами { Up+k (t)} = const. Скорость деградации
|
||||||||
|
|
Последнее изменение этой страницы: 2021-06-14; просмотров: 82; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.190.176.78 (0.006 с.) |
 ‑ вектор скорости старения (износа, деградации, снижения безаварийности, безопасности, безотказности и остаточного ресурса);
‑ вектор скорости старения (износа, деградации, снижения безаварийности, безопасности, безотказности и остаточного ресурса); и сигнал { Yn (t)} имеют квазистационарную составляющую, определяемую последними слагаемыми уравнений системы (2.13), которые изменяются только в моменты управляющих воздействий со стороны персонала. Между этими моментами времени { Up+k (t)} = const.
и сигнал { Yn (t)} имеют квазистационарную составляющую, определяемую последними слагаемыми уравнений системы (2.13), которые изменяются только в моменты управляющих воздействий со стороны персонала. Между этими моментами времени { Up+k (t)} = const.


