
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Математическое Описание бпла квадрокоптерного типа как объекта управленияСодержание книги
Поиск на нашем сайте
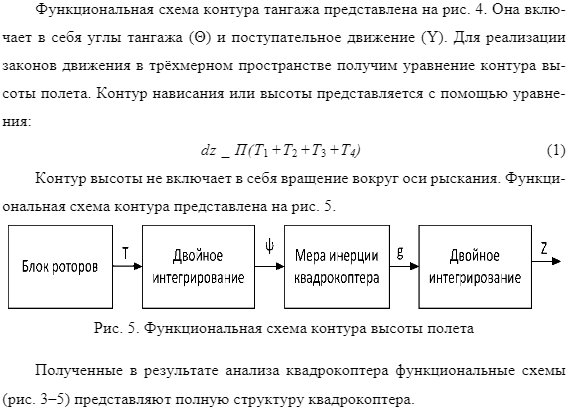
2.2 Бортовые системы управления полётом БПЛА квадрокоптерного типа Бортовые САУ функционируют на нижнем, исполнительном уровне управления, обеспечивая отработку действий, рассчитанных на траекторном уровне. Еще одной важной задачей САУ T I является ограничение предельных значений заданных пилотажных параметров. Общая функциональная схема автопилота может быть представлена в виде, показанном на рисунке 1.5.
Рисунок 1 - Функциональна схема автопилота БПЛА Задающие воздействия X зад подаются на устройство управления (УУ), где сравниваются с текущими значениями X, полученными от измерительных устройств (И). На основе резльтатов сравнения и по заданному алгоритму вырабатываются управляюшие воздействия U, поступающие на исполнительные устройства ИУ, изменяющие аэродинамические силы R A и тягу двигателя для изменения текущего состояния ЛА, на который действуют так же возмущения f.
Большинство современных автопилотов выполняется по трехканальной схеме: каналы руля высоты (стабилизатора), руля направления и элеронов. Автомат тяги используется для управления скоростью полета [75, 93].
Большое влияние на функционирование автопилота оказывает реализация не только УУ, но и измерительная схема. Для получения отказоустойчивой САУ применяют комплексную обработку информации [79] от разных датчиков и гибкие алгоритмы управления, позволяющие обеспечивать не только обработку X зад, но и парировать действие возмущений. Описание некоторых бортовых САУ полетом современных БЛА (по материалам [52, 86, 104, 9]) приведено в приложении Д.
Принципы действия и подробное математическое описание исполнительных устройств и различных первичных измерительных преобразователей информации рассмотрены в [75]. В первом приближении передаточные функции измерительных датчиков W x И и исполнительных устройств W x ИУ можно записать как:
где d x – перемещения исполнительного органа для изменения управляемой величины x под действие управляющего сигнала U x; I x – величина информационного сигнала, передающего измеренную величину параметра x; k x ИУи k x И–коэффициенты пропорциональности, T x –постоянная времени.
Задачи этого уровня решаются традиционными методами теории автоматического управления, поэтому качество их решения может быть выражено показателями качества переходных процессов САУ.
Прямыми показателями качества переходных процессов в САУ являются s – перерегулирование; t рег – время регулирования; D – статическая точность.
Для получения косвенных оценок, позволяющих сравнивать САУ между собой, используются интегральные характеристики, наибольшее распространение имеют квадратичные оценки отклонения e регулируемой величины от желаемой:
представления о характере процессов в системе: одинаковому значению J могут отвечать разные формы переходного процесса.
|
||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 235; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.15 (0.01 с.) |







 где t –коэффициент, определяющий вид желаемого переходного процесса. Недостатком оценки вида (1.5) является то, что она не дает полного
где t –коэффициент, определяющий вид желаемого переходного процесса. Недостатком оценки вида (1.5) является то, что она не дает полного


