Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Описание аэрофотосъёмочных БПЛА и выбор аппаратного решения
В последнее время в аэрофотосъёмке набирает оборот использование БПЛА в фотограмметрических целях. Основными факторами такой тенденции является высокая оперативность получения данных и относительно низкая стоимость реализации таких проектов. Таким образом, съемка небольших территорий в целях крупномасштабного трёхмерного моделирования с помощью беспилотных летательных аппаратов становится практически вне конкуренции по сравнению с классической аэросъемкой, которая осуществляется с помощью самолётов и вертолётов. Однако, помимо преимуществ, БПЛА характеризуются рядом особенностей. Например, использование некалиброванных камер без компенсации сдвига изображений, нестабильное поведение БПЛА в воздушном пространстве в условиях воздействия сильных ветров, применение в качестве средства позиционирования встроенных GPS приёмников, обладающих серъёзной погрешностью, невозможность проведения качественной аэрофотосъёмки для использования в фотограмметрических целях в ручном режиме. В процессе аэрофотосъёмки БПЛА записывает в специальный файл данные о центре фотографирования снимка (координаты, высота), который необходим для создания трёхмерной модели и присваиванию «грубых» размеров, по данным с БПЛА. Однако, основываясь только на данных с GPS приёмника, установленном на БПЛА, невозможно определить размеры трёхмерной модели с низкой погрешностью из-за высокой ошибки в определении координат самим БПЛА. Для нивелирования погрешностей в определении размеров будущей трёхмерной модели на БПЛА устанавливают дополнительно специальные высокоточные GNSS приёмники, которые также записывают координаты центра снимка в момент фотографирования, либо используют замеренные высокоточным GNSS приёмником точки и в последствии при обработке данных аэрофотосъёмки задают координаты этих точек. Из-за сложности и уклона в сторону геодезии расчёты, основанные на данных GNSS приёмника с БПЛА рассмотрены не будут. Для выполнения работы был выбран более традиционный способ замера координат и высот в опорных точках и использование их для уменьшения погрешности измерений трёхмерной полигональной модели. БПЛА гражданского назначения различают на две большие группы:
- БПЛА, построенные по самолётной схеме, то есть использующие в качестве подъёмной силы крыло, реже планер (для БПЛА, построенных по типу «летающее крыло»). - БПЛА, построенные по вертолётному типу, то есть использующие в качестве подъёмной силы вращение лопастей электродвигателей. В данную группу относятся мультикоптеры. Каждый из этих типов выполняет свой круг задач. БПЛА самолетного типа применяются преимущественно для проведения аэрофотосъёмки протяжённых участков местности. Однако, из-за типа планера, подразумевающей постоянное соблюдение определённой минимальной горизонтальной скорости и невозможности зависать в воздухе, БПЛА, построенные по самолётному типу, не годятся для аэрофотосъёмки таких наземных объектов, как здания. БПЛА вертолетного типа применяются в основном для аэрофотосъёмки небольших территорий или обследования сложных конструкций. Основным их преимуществом является возможность зависать в воздухе, то есть иметь нулевую горизонтальную скорость. БПЛА вертолётного типа может разворачиваться на месте, в отличии от самолётного, которому нужен большой радиус для разворота. Данная возможность очень важна в условиях городской аэрофотосъёмки, из-за большого количества высотных зданий, проводов между ними и риска повреждения аппарата. В настоящее время не существует единой общепринятой классификации БПЛА гражданского назначения. В дипломной работе систематизация БПЛА представлена по характеристикам: Гражданские БПЛА, применяемые для решения задач аэрофотосъёмки, можно разделить по: - типу компоновочной схемы; - радиусу действия; - продолжительности работы от одного заряда аккумулятора; - аэрофотосъёмочному оборудованию; - максимальной скорости; - минимальная и максимальная высота полёта; - тип крепления камеры: фиксированный или настраиваемый; - максимальная и минимальная высота полёта; В настоящее время сложилось несколько систем компоновки БПЛА: классическая – самолётная схема (Рисунок 2), схема «летающее крыло» (Рис. 3), вертолётная схема. Конструкция «летающее крыло» используется как правило для изготовления БПЛА не более 100 кг, для более тяжелых БПЛА применяется самолётная схема компоновки.
Рисунок 2. БПЛА, изготовленный по классической схеме
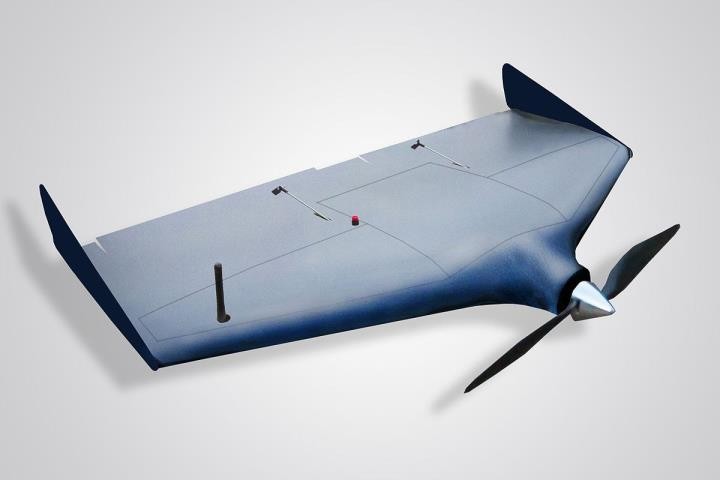
Рисунок 3. БПЛА, изготовленный по схеме «летающее крыло»
У вертолетных БПЛА также существует две системы компоновки: классическая – один ротор с винтом (Рисунок 4) и «мультикоптер» - с несколькими электродвигателями (Рисунок 5).
Рисунок 4. Вертолётный БПЛА классической схемы компоновки
Рисунок 5. Вертолетный БПЛА «мультикоптер»
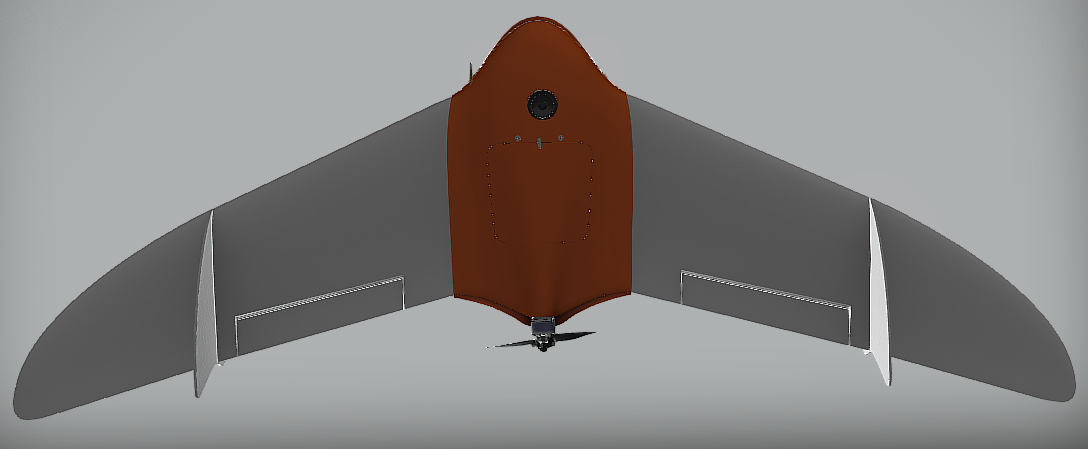
Основными частями аэрофотосъемочного БПЛА являются: - корпус; - двигатель; - бортовая система управления (автопилот); - наземная система управления; - аэрофотосъемочное оборудование; Корпус БПЛА изготавливают из легкого пластика, чтобы защитить дорогостоящую аппаратуру и средства управления и навигации. Двигатель БПЛА может быть бензиновым и электрическим. Бензиновый БПЛА применяется в том случае, когда необходима большая продолжительность полета. Электрическая двигательная установка используется для непродолжительных и недальних полетов. Использование бензиновых двигателей существенно увеличивает конечную массы БПЛА. Бортовая система управления (автопилот ) – наиболее важный элемент управления БПЛА. Он содержит процессор и множество датчиков: гироскоп, акселерометр, датчик скорости, датчик давления, датчики высоты, пиродатчик горизонта, систему спутниковой навигации, магнитный компас. В задачи автопилота входят: - навигация и обеспечение полета; - фотографирование участков местности (управление фотоаппаратурой); определение координат исследуемых участков местности. Автопилот регистрирует координаты центров фотографирования, полученные бортовым спутниковым приемником ГЛОНАСС/GPS, чтобы программа автоматической обработки изображений смогла после увязывания фотографий рассчитать размеры полученной модели. Наземная система управления – это смартфон или планшет на базе операционной системы Android, с установленной программой автоматизации аэрофотосъёмки. Важной частью НСУ является программное обеспечение, которое служит для планирования полетного задания и отображения хода его выполнения. Полетное задание составляется, как правило, автоматически по заданному контуру площадного объекта. Также существует возможность планировки полетного маршрута, исходя из необходимой высоты полета и требуемого разрешения фотоснимков. Во время полета на мониторе отображается положение БПЛА и контуры снимаемых фотографий. Полезная нагрузка (аэрофотосъемочное оборудование) – фотоаппаратура, предназначенная для аэросъемки местности, представлена цифровыми и зеркальными фотокамерами, а также комплектуемыми сменными объективами. Аэрофотосъемочное оборудование устанавливается на БПЛА в зависимости от его класса и цели использования. Для того чтобы выбрать оптимальное оборудование для проведения тестов программы автоматизации аэрофотосъёмки и получения трёхмерной модели наземного объекта (университета МИРЭА), я провёл сравнение двух популярных аппаратных решений: - Первым таким решением является использование Геоскан 201 – БПЛА, построенного по самолётной схеме «летающее крыло», от компании Геоскан. Он представляет собой аэрофотосъёмочный комплекс, состоящий из БПЛА, цифровой камеры, ноутбука для наземного мониторинга состояния БПЛА, аккумуляторной батареи и зарядного устройства. Рисунок 6.
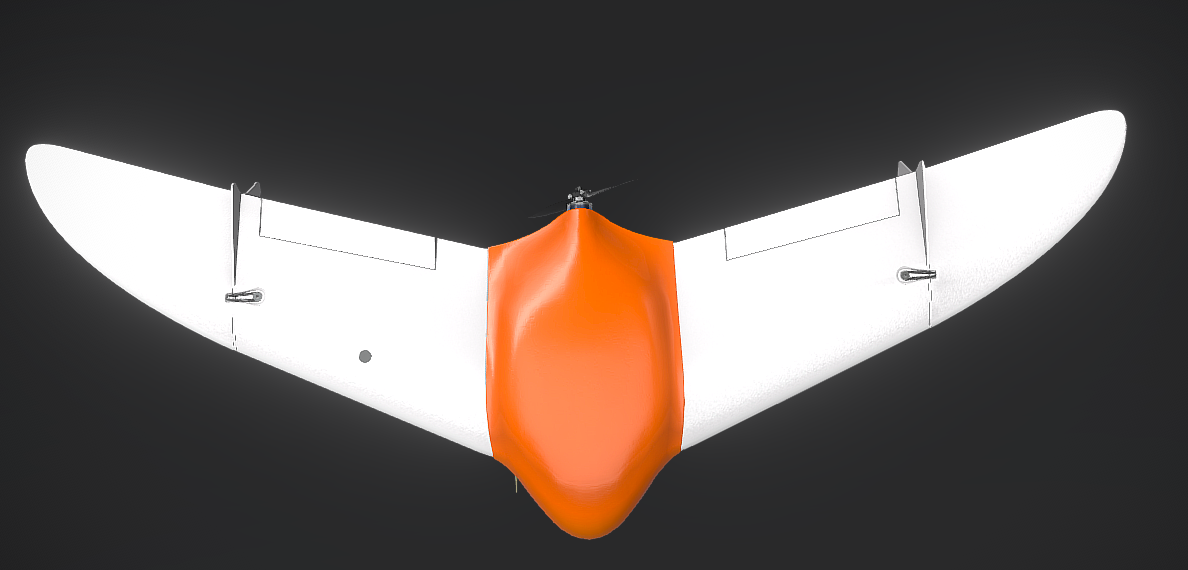
Рисунок 6 – БПЛА Геоскан 201 На виде снизу (Рисунок 7) хорошо видно расположение камеры данного БПЛА. Она зафиксирована под углом в 90 градусов относительно земли. Это достаточно критично, поскольку такие сложные наземные объекты как здания не могут быть сняты камерой, расположенной только под заданным углом. Для лучшего получения данных с целью трёхмерного моделирования необходимо чтобы камера располагалась под углом около 75 градусов. Данный угол даст возможность получить аэрофотоснимки стен здания и других его элементов, а не только крыши.
Рисунок 7 – БПЛА Геоскан 201, вид снизу Краткие характеристики данного аппарата представлены в таблице 1.
Таблица 1 – краткие характеристики Геоскан 201 Поскольку данный БПЛА построен по самолётной компоновочной схеме «летающее крыло», то для удержания его в воздухе необходима хотя бы минимальная горизонтальная скорость. Это делает применение данного БПЛА в городских условиях крайне рискованным из-за большого количества высотных зданий. Если взлёт данного самолётного БПЛА ещё можно осуществить в городских условиях с помощью специальной катапульты, то его посадку, которая подразумевает выпуск парашюта и приземление, уже осуществить достаточно сложно, так как нет системы управления натяжения тросами парашюта, следовательно при малейшем изменении ветра такой БПЛА может приземлиться в совершенно непредсказуемом месте. Решающим же фактором в выборе БПЛА для тестирования системы управления аэрофотосъёмкой стала цена данного аппарата. Другим популярным решением в аэрофотосъёмке в настоящее время является мультикоптер Phantom 4, от компании DJI (Рисунок 8).
Рисунок 8 – квадрокоптер Phantom 4 PRO Управление данным БПЛА происходит с помощью пульта и приложения DJI GO, установленным на смартфон, куда выводится телеметрическая информация. Основной особенностью данного аппарата является предоставление его разработчиком специальных инструментов для разработчика DJI SDK, которые позволяют создавать свои собственные приложения для решения разного рода задач. Данный квадрокоптер имеет на своём борту камеру, наклон которой может изменяется от 0 до 90 градусов, что позволяет его использовать для съёмки сложных наземных объектов. В таблице 2 можно ознакомиться с краткими характеристиками Phantom 4 PRO.
Таблица 2 – краткие характеристики Phantom 4 Pro
Проанализировав информацию по данным БПЛА я пришёл к выводу, что использование в целях тестирования программы автоматического управления аэрофотосъёмкой, учитывая все особенности представленных аппаратов, целесообразно проводить с помощью квадрокоптера Phantom 4 Pro. Его относительно невысокая цена, возможность изменения наклона камеры, способность использовать квадрокоптер для съёмки сложных наземных участков, а также предоставление производителем данного БПЛА средств разработчика для создания своих собственных приложений являются ключевыми для выполнения данной дипломной работы.
1.3 Фотограмметрия, основные определения и формулы Фотограмметрия – техническая наука, занимающаяся определением характеристик объектов и их положения в трёхмерном пространстве по фотоснимкам. В настоящее время фотограмметрия применяется в самых различных сферах человеческой деятельности. Например: получение рельефа местности, контроль строительства посредством аэросъёмки, трёхмерное моделирование объектов культурного наследия, трёхмерное моделирование городов для улучшения качества их планирования и так далее. В фотограмметрии для определения пространственных координат точек объекта изобразившегося на снимке применяется несколько систем координат: прямоугольная геоцентрическая система координат, фотограмметрическая система координат, системы координат, связанные со снимком – плоская система координат снимка и вспомогательная система координат. Геоцентрическая система координат (Xг, Yг, Zг), которая является общей для всего земного эллипсоида, используется при решении фотограмметрических задач на большие площади (расстояния).
Геоцентрическая система координат является левой системой координат (Рис.
Начало этой системы в центре земного эллипсоида, ось Z Г совмещена с полярной осью OГ P, а ось X Г установлена в плоскости начального меридиана. Координаты Гаусса в этом случае преобразуют в геоцентрические координаты по формулам, известным из курса высшей геодезии. 14 Вектор, определяющий положение точки объекта в данной системе координат, будет иметь компоненты:
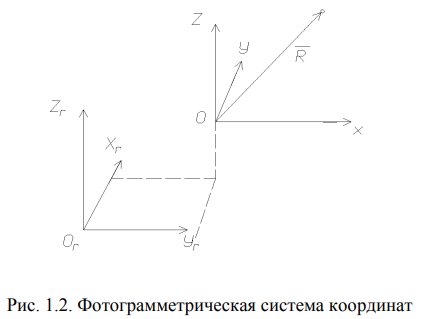
Фотограмметрическая система координат (правая система координат OXYZ) в общем случае может располагаться произвольно, т.е. начало системы координат и направления осей фотограмметрической системы координат может быть любым. В частном случае начало совмещают с какой-либо точкой местности, или с центром проекции снимка, а плоскость XY устанавливают горизонтально (Рис. 1.2).
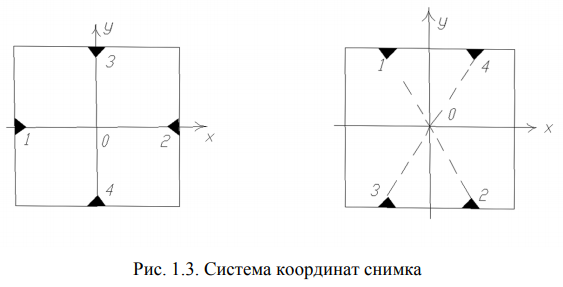
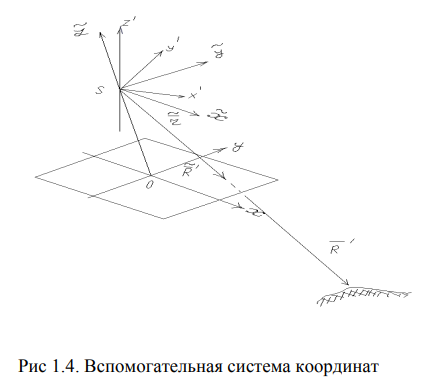
Вектор, определяющий положение точки объекта в данной системе координат, будет иметь компоненты: Система координат снимка - плоская, правая прямоугольная система координат oxy, служит для определения положения точки на снимке, т.е. для измерения изображения (Рис. 1.3). Начало координат находится в пересечении прямых, соединяющих координатные метки 1, 2, 3, 4. Осью x служит прямая 1 – 2 или прямая, параллельная линии 3 – 2. Часто начала координат на снимке совмещают с точкой, координаты которой равны средним значениям координат меток 1, 2, 3, 4. Вспомогательная система координат Sxyz - система координат, в которой изображение точки имеет три координаты (Рис. 1.4). Оси x и y этой системы координат параллельны соответствующим осям плоской системы координат oxy, а ось z совпадает с главным лучом So (оптической осью). Компонентами вектора, определяющего положение точки снимка - изображения точки объекта, в системе Sxyz будут: x, y и z = const = - f, где f - фокусное расстояние, т.е.
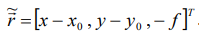
Данная система координат играет важную роль в установлении зависимостей между плоскими координатами изображения точек объекта и координатами точек объекта в пространстве предметов. Кроме упомянутых пространственных систем координат в фотограмметрии используется пространственная система координат SX ¢Y¢Z¢ с началом в центре проекции S. Координатные оси этой системы параллельны соответствующим осям фотограмметрической системы OXYZ или осям системы координат. Положение снимка в момент фотографирования определяют элементы ориентирования. Они разделяются на две группы: элементы внутреннего ориентирования и элементы внешнего ориентирования Элементы внутреннего ориентирования – фокусное расстояние съемочной камеры f и 0 x, 0 y, координаты главной точки снимка о, определяют положение центра проекции S относительно снимка. Эти элементы позволяют восстановить связку лучей, существовавшую в момент фотографирования. Координаты точки снимка во вспомогательной системе координат Sxyz с учетом элементов внутреннего ориентирования будут равны: x = x-x0; y = y-y0; z = - f, а вектор положения точки на снимке:
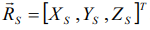
Элементы внешнего ориентирования определяют положение связки лучей относительно пространственной прямоугольной системы координат в момент фотографирования. К ним относятся: - три линейных элемента внешнего ориентирования; - три угловых элемента внешнего ориентирования. Всего элементов внешнего ориентирования шесть. Линейные элементы внешнего ориентирования координаты центра проекции S -- XS YS ZS, по отношению к началу выбранной пространственной системы координат OXYZ (Рис. 1.4). Вектор RS r положения точки фотографирования S относительно начала системы координат OXYZ, будет иметь компоненты:
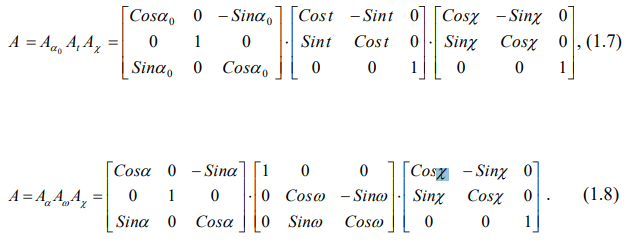
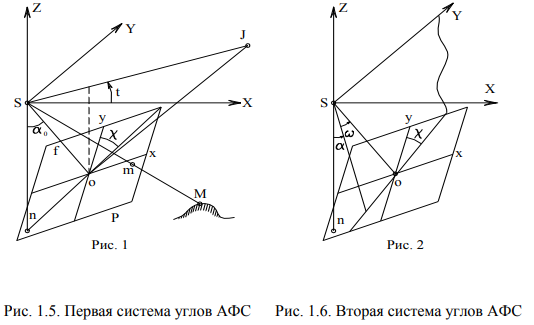
Угловые элементы внешнего ориентирования определяют положение плоскости снимка (изображения) относительно осей выбранной системы координат. Системы угловых элементов внешнего ориентирования, используемых в фотограмметрии, являются системами углов Эйлера. 18 Как известно, существует 12 систем углов Эйлера. Число систем углов может быть увеличено если один или несколько углов Эйлера взять с противоположным знаком, более того, иногда пользуются левыми системами координат. В фотограмметрии используется несколько систем углов Эйлера, ниже дано описание наиболее распространенных систем углов. Первая система углов. К этой системе относятся (Рис. 1.5), a 0 - угол наклона снимка или угол отклонения оптической оси фотокамеры от отвесной линии; t – дирекционный угол оптической оси фотокамеры – угол между осью SX и проекцией главного луча на плоскость SXY; c - угол поворота снимка – угол на снимке между главной вертикалью и осью y. Вторая система углов (a,w,c). Эта система углов включает (Рис. 1.6): a - продольный угол наклона снимка, заключенный между осью SZ и проекцией главного луча на плоскость SXZ; c - угол поворота снимка – угол в плоскости снимка между осью y и следом плоскости, проходящей через главный луч и ось SY. Таким образом, аэроснимок имеет девять элементов ориентирования три элемента внутреннего ориентирования и шесть элементов внешнего ориентирования. Из шести элементов внешнего ориентирования три – линейные, три угловые. Из них a 0 и t или a и w фиксируют направление главного луча, а c - поворот вокруг главного луча. Знание угловых элементов внешнего ориентирования снимка дает возможность сформировать матрицу ортогональных преобразований A, позволяющую осуществить переход от вспомогательной системы координат Sxyz к системе координат SX ¢Y¢Z¢ и, тем самым найти в этой системе вектор R положения точки на снимке:
Матрица ортогональных преобразований A будет определяться системой углов Эйлера и для 1-ой и 2-ой систем углов ориентирования соответственно равна (см. Рис. 1.5, Рис. 1.6):
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 599; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.61.142 (0.031 с.) |