Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Изучение работы сервопривода
Цель работы Получить навыки программирования микроконтроллера, разработать программу управления электродвигателем - SERVO. Теоретическая справка В этой работе изучается такой элемент, как Servo (сервопривод). Сервопривод – это привод, предназначенный для осуществления контроля (угол поворота вала, скорость вращения/движения и так далее) над различными объектами, находящимися в постоянном движении. Контроль производится в зависимости от заданных ему параметров извне. Сервопривод включает в свой состав такие элементы как:
Для использования функций сервопривода в начале исполняемого кода следует подключить библиотеку «Servo» делается это строкой #include <Servo.h>. Далее представлены основные функции для работы с сервоприводом: Servo.attach(pin, min, max) – прикрепляет переменную сервопривода к контакту на доске. Где min - (необязательно) - значение PWM (в микросекундах), которое будет соответствовать минимальным 0 градусам, max - (необязательно)- значение PWM (в микросекундах), которое будет соответствовать максимуму 180 градусов; Servo.write(angle) – позиционирует стержень серводвигателя под заданным углом, angle – (в градусах) угол, под которым будет располагаться стержень; Servo. writeMicroseconds(uS) – то же, что и функция write (), но запрашивает ввод в микросекундах, где uS - значение в микросекундах для поворота стержня в определенную степень; Servo. read() – считывает текущее значение угла сервопривод; Servo.attached() – проверяет, подключен ли сервопривод к штифту; Servo.detach – освобождает сервопривод от указанного pin-вывода;
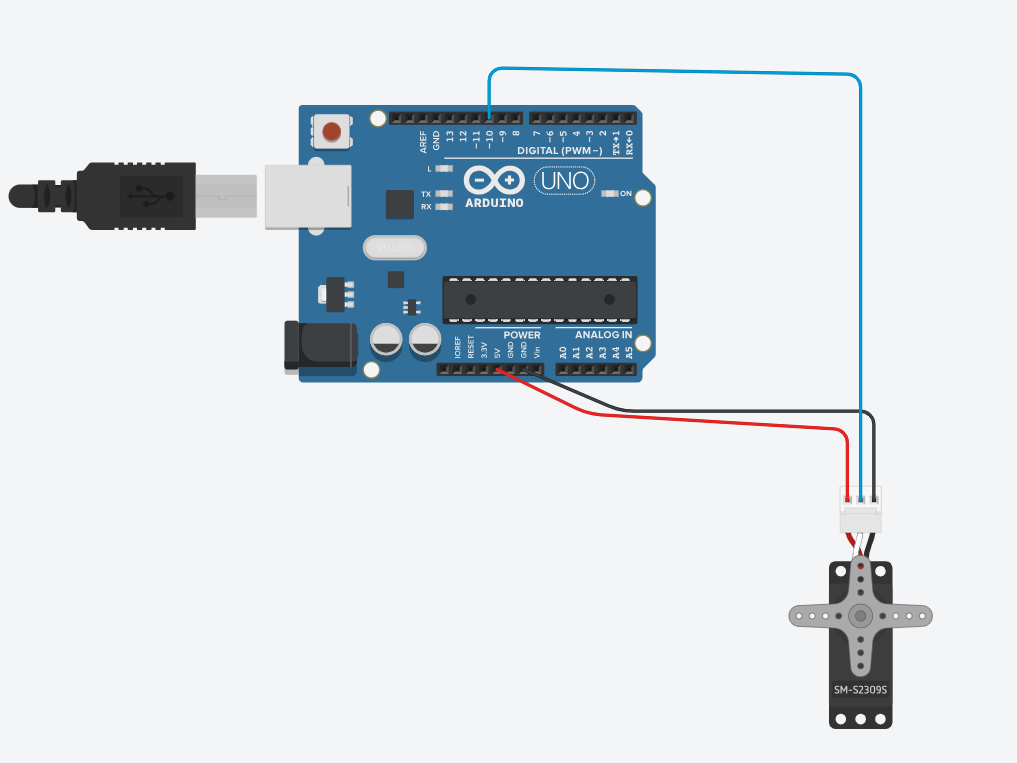
Ход работы В начале работы необходимо выбрать сервомотор из библиотеки компонентов и подключить его к Arduino Uno так, как показано на рис. 43, 44.
Рис.43 - Выбор компонента сервопривода
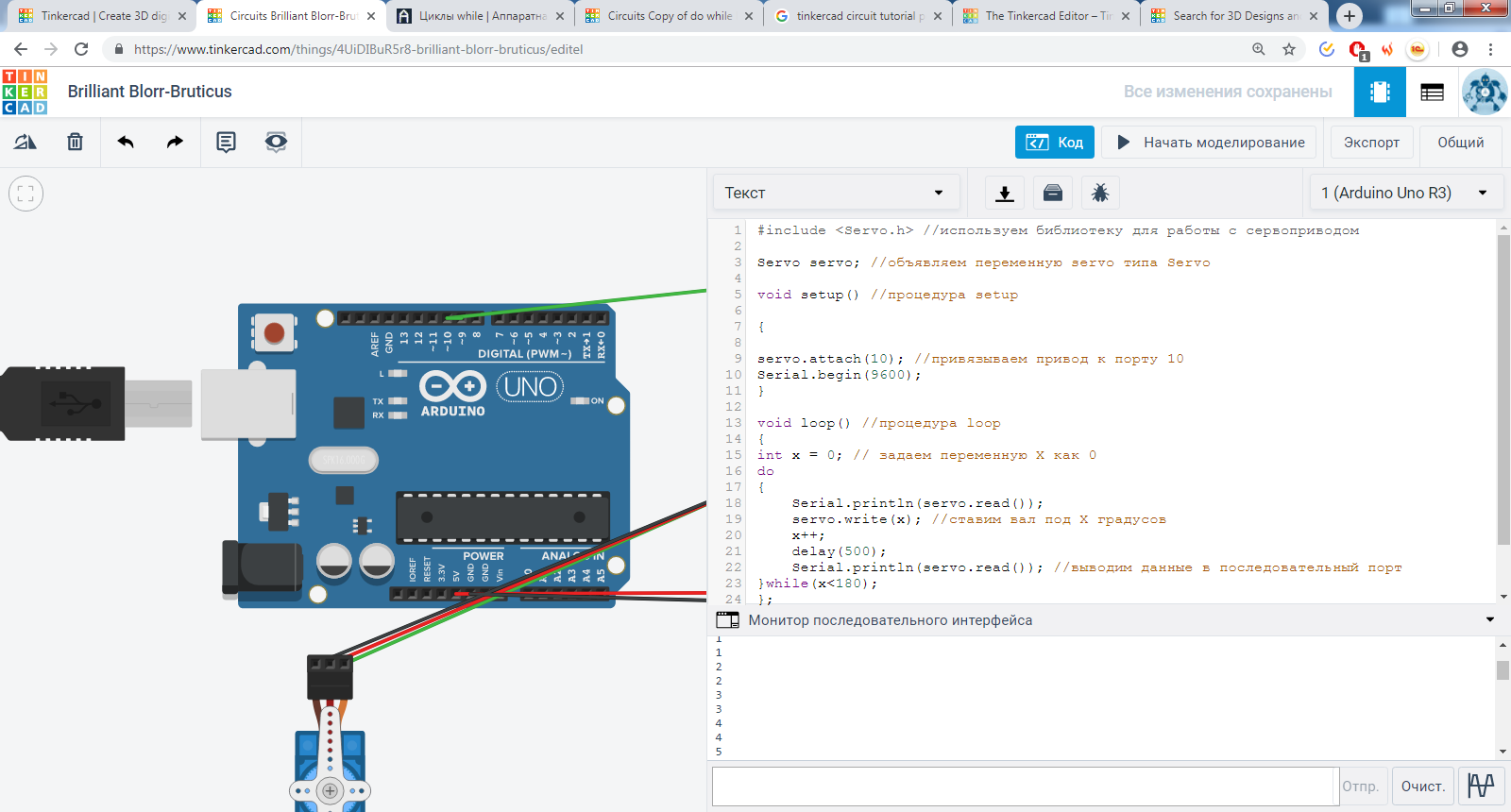
Рис. 44 - Схема подключения сервопривода к плате Arduino Uno Переменная «servo.attach» используется для определения pin-вывода, которая предназначена для управления сервоприводом. В функции «setup» подключается элемент «servo» с выводом 10, который будет управлять сервоприводом, используя необходимую команду: servo.attach(10); Так же следует добавить строку Serial.begin(9600), для подключения последовательного порта на скорости 9600 бит/сек. Чтобы отобразить содержимое используем функцию построчного вывода данных в последовательный порт Serial.println() и функцию вывода текущего положения сервопривода servo.read(): Serial.println(servo.read()); Используем дополнительно цикл do while. Общая конструкция цикла состоит из двух частей do{} основного тела цикла и while() условие для выполнения этого цикла: do{операторы} while (условие выполнения); Далее задается переменная X, которая будет равна углу наклона вала в градусах как в одну сторону, так и в другую: int x = 0; // задаем переменную Х как 0 do{ servo.write(x); //ставим вал под Х градусов x=x+1; delay(500); Serial.println(servo.read()); }while(x<180);
Рис.45 - Листинг программы для управления электродвигателем – SERVO
После запуска симуляции в окне «Монитор последдовательного интерфейса» будут отбражаться значения угла поворота вала сервопривода. Слева на рабочем поле будет видно его перемещение. Итогом вал дойдет до 180 градусов, переместится к нулевому и снова повторит цикл. Задания к работе.
|
||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 789; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.16.29.209 (0.006 с.) |