
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принцип работы частотного радиовысотомера
Передатчик частотного РВ вырабатывает сверхвысокочастотные непрерывные частотно-модулированные, например, по треугольному закону, колебания U ПРД частотой f 1со средним значением несущей частоты f 0, девиацией Δ f, периодом модуляции ТМ (рис. 2.1).
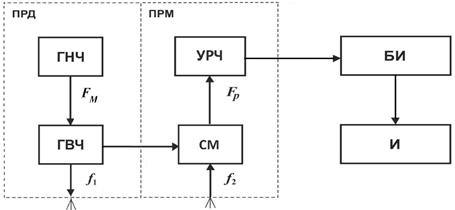
Рис. 2.1. Временные диаграммы амплитуды U ПРД Передатчик ПРД (рис. 2.2) состоит из генераторов высокой ГВЧ и низкой ГНЧ частот. ГНЧ формирует модулирующее напряжение F М = 1/ ТМ, которое управляет частотой ГВЧ по треугольному (см. рис. 2.1), либо пилообразному закону.
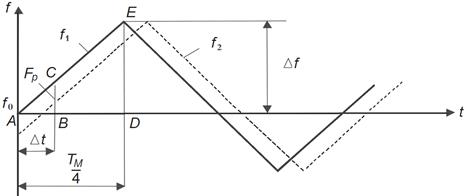
Рис. 2.2. Структурная схема частотного РВ Частотно-модулированный сигнал частотой f 1 через передающую антенну излучается в направлении земной поверхности. В смеситель СМ приемника ПРМ поступают два радиосигнала: отраженный от земли частотой f 2 и специально ослабленный зондирующий частотой f 1 (рис. 2.3). За время распространения Δ t = 2 H / c,где H – высота полета; с = 3·108 м/с – скорость распространения радиоволн, частота зондирующего сигнала изменяется на величину F р = ǀ f 1 – f 2 ǀ пропорциональную Δ t,следовательно, H. Модуль F р используется в формуле, так как частота не может принимать отрицательные значения.
Рис. 2.3. Временные диаграммы частот зондирующего f 1 и отраженного f 2 сигналов Таким образом, информация о высоте полета содержится в значении частоты Fр, которая изменяется пропорционально высоте полета. Поэтому в качестве блока измерения БИ следует использовать измеритель частоты (частотомер), Аналитическая связь между величинами H и Fр определяется основным уравнением радиовысотомера, которое получают при рассмотрении треугольников ABC и ADE (см. рис. 2.3). Из их подобия следует, что
Но
где K – постоянная радиовысотомера. В блоке измерения БИ частота Fр преобразуется в пропорциональное ей, и следовательно, высоте H постоянное напряжение. Это напряжение подается на индикатор И, шкалу которого градуируют в метрах. В БИ (рис. 2.4) основным узлом является счетчик частоты СЧ, в качестве которого в аналоговых схемах используют емкостный накопитель (интегратор). Он формирует постоянное напряжение, пропорциональное частоте Fр. Это напряжение должно зависеть только от частоты и не должно зависеть от амплитуды, поэтому перед СЧ включают амплитудный ограничитель AO. Ограничитель формирует импульсы при пересечении напряжением сигнала нулевого уровня. Выходное напряжение счетчика усиливается усилителем постоянного тока УПТ и подается на индикатор И.
Рис. 2.4. Структурная схема БИ РВ, реализованные по разомкнутой схеме без обратных связей, показанной на рис. 2.2, называют радиовысотомерами неследящего типа. Такими являются устаревшие отечественные приборы до РВ-5 включительно. Неследящие РВ имеют ряд недостатков, одним их которых является наличие методической погрешности из-за дискретного характера разностной частоты Fр, которая может принимать только значения, кратные частоте модуляции FМ:
где n = 1, 2, 3, … Из (3) следует, что погрешность измерения отсутствует только на высотах Например, для радиовысотомера РВ-5 K =200 Гц/м, FМ = 150 Гц, для n = 1, 2, 3 и т. д. получим D Н = 0,75 м и значения точно измеряемых высот 0,75, 1,5, 2,25 м и т. д. Внутри этого интервала показания высотомера будут неустойчивыми. При этом минимальная измеряемая высота не может быть меньше 3D Н. Из выражения (3) При этом в спектре Fр будут присутствовать гармонические составляющие этих частот. Если показания неустойчивы по гармоникам основной частоты, то устойчивость обеспечивается гармониками дополнительной. При этом Другим недостатком РВ неследящего типа является невысокая помехоустойчивость из-за низкого соотношения сигнал / шум на выходе УРЧ с требуемой широкой полосой пропускания, поскольку частота Fр в измеряемом РВ диапазоне высот изменяется в широких пределах от 1–3 кГц до 150–160 кГц,
Следящий радиовысотомер, на котором информативным электрическим параметром является период модуляции TM, свободен от рассмотренных недостатков. Его структурная схема представлена на рис. 2.5.
Рис. 2.5. Структурная схема следящего РВ Частота Fр в таком РВ за счет следящей обратной связи, поддерживается постоянной во всем диапазоне измеряемых высот и равной переходной частоте настройки f 0 частотного детектора. В РВ следящего типа применен несимметричный пилообразный закон частотной модуляции (рис. 2.6), тогда основное уравнение радиовысотомера принимает вид
При поддержании постоянными Fр и D f, из выражения (4) следует
Таким образом, при поддержании постоянным K 1, информация о высоте H содержится в периоде модуляции TM и может быть легко определена цифровым периодомером ПМ заполнением интервала времени счетными импульсами (методом дискретного счета). На рис. 2.6 приведены временные диаграммы, поясняющие зависимость (5) периода модуляции TM от времени задержки
Рис. 2.6. Временные диаграммы к работе следящего РВ Рассмотрим работу следящего радиовысотомера по рис. 5.
Такое схемотехническое решение позволило использовать в следящем РВ узкополосные УРЧ и ЧД и повысить помехозащищенность при отсутствии методической погрешности из-за дискретного характера разностной частоты F р (3). Вместе с тем, следящим РВ необходим режим поиска, когда, например, при первоначальном включении частота Fр не входит в полосу пропускания канала, содержащего УРЧ и ЧД. Отсутствие сигала на выходе УРЧ заставляет УПЗ плавно увеличивать напряжение U Д на своем выходе, которое через сумматор СУ изменяет длительность прямого хода TM модулятора ЧМ от минимального до максимального значения. Поскольку Fр обратно пропорциональна TM (4), найдется такой TM, когда Fр войдет в полосу пропускания D f УРЧ и ЧД (для РВ-5М D f = 5 кГц), и тогда появившееся на выходе УРЧ напряжение выключит для УПЗ режим захвата, когда его выходное напряжение U п фиксируется, РВ переходит в описанный выше режим слежения.
Схема следящего радиовысотомера широко применяется в отечественных высотомерах РВ-5М, А-034, А-037, РВ-85, А-053 и высотомерах иностранных фирм. Особенности работы радиовысотомера Земную поверхность условно можно разбить на два вида: гладкую (зеркальную) и шероховатую. Поверхность создает зеркальное отражение, если высота ее неровностей не превышает 0,1 длины волны. Для РВ сантиметрового диапазона зеркально отражающей поверхностью можно считать такую, высота неровностей которой 5–7 мм. К таким поверхностям можно отнести поверхность водоема в штилевую погоду или бетонированную поверхность ВПП. Учитывая, что ширина диаграммы направленности антенны РВ по уровню половинной мощности составляет 40–50°, при облучении гладких поверхностей значительная часть отраженной мощности не попадает в приемную антенну, что влияет на высотность и точность РВ при измерении больших высот. При диффузном отражении от шероховатых поверхностей мощность принятого сигнала увеличивается, однако прием сигналов от участков с различной наклонной дальностью приводит к увеличению ошибки измерений, поэтому пользоваться РВ при полетах в горной местности не рекомендуется. Если РВ располагается над земной поверхностью, состоящей из нескольких слоев с различными физическими свойствами (рис. 2.8), то измеренное значение высоты Н И может отличаться от высоты Н 1 до границы раздела первых двух физических сред. Примерами таких ситуаций может быть работа РВ над водой, льдом, снегом, над поверхностью, покрытой растительностью. Работа РВ над многослойной отражающей поверхностью происходит следующим образом. Излучаемый РВ сигнал доходит до границы раздела физических сред 1 и 2 и частично отражается от нее. Отраженный от этой границы сигнал с амплитудой Em 1 принимается РВ. Часть излучаемого сигнала проходит в физическую среду 2 и распространяется до границы раздела сред 2 и 3, отражается от нее возвращаясь к РВ с амплитудой Em 2. Таким образом, если ограничиться рассмотрением только трех слоев, то к РВ поступают два сигнала, прошедшие в пространстве различные высоты. Поэтому измеряемая высота будет зависеть от соотношения амплитуд Em 1 и Em 2. Если Em 1 >> Em 2, то вторым отраженным сигналом можно пренебречь и РВ должен измерять высоту Н И = Н 1. Если же Em 1 << Em 2, то РВ должен показывать значения Н И > Н 2, поскольку скорость распространения радиоволны в физической среде 2 меньше, чем в вакууме. Если амплитуды Em 1 и Em 2 сравнимы, то РВ должен показывать значения, лежащие между величинами Н 1 и Н 2.
Рис. 2.8. Работа РВ над многослойной отражающей поверхностью Соотношение между амплитудами Em 1 и Em 2 определяется электрическими свойствами физических сред: относительной диэлектрической проницаемостью e и коэффициентом затухания a. Коэффициент отражения k 1,2 (отношение амплитуд отраженной и падающей волн) от границы раздела двух физических сред и скорость распространения радиоволны v определяются соотношениями
Рассмотрим несколько характерных случаев. Работа РВ над водной поверхностью. Работа над водной поверхностью, покрытой льдом. Здесь надо различать два случая: пресный и соленый лед. При работе над соленым льдом При работе над пресным (материковым) льдом Работа РВ над поверхностью, покрытой снегом. Диэлектрическая проницаемость снега лежит между значениями e для воздуха и льда, поэтому коэффициент отражения от снега еще меньше, чем ото льда, и почти вся энергия радиоволны проходит через снег и отражается от земной поверхности. Вследствие этого РВ показывает высоту до земной поверхности. Если толщина снежного покрова значительна, то из-за затухания радиоволны в снеге может уменьшиться высотность РВ. Работа РВ над поверхностью, покрытой растительностью. Показания РВ зависят от характера леса и времени года. Над густым лиственным лесом показания РВ соответствуют высоте над кроной деревьев. Над редким лесом РВ показывает высоту до земной поверхности. В общем случае РВ может давать показания, лежащие между значениями высоты до земной поверхности и вершин деревьев.
Погрешности Точность измерения высоты характеризуется удвоенной величиной среднеквадратичной погрешности 2s, которой соответствует доверительная вероятность, равная 0,95. Это означает, что истинное значение высоты H будет находиться в пределах интервала Погрешность измерения высоты имеет несколько основных составляющих. Методическую погрешность, обусловленную периодическим характером закона ЧМ Аппаратурная погрешность появляется вследствие нестабильности девиации частоты D f и частоты модуляции FM, отклонения реальных параметров элементов и узлов от идеальных. Для ее уменьшения в РВ, в частности, применяются схемы автоподстройки постоянной РВ. Методическую погрешность дискретности вместе с инструментальной погрешностью определяют точностные параметры РВ. Динамическая погрешность измерения высоты обусловлена инерционными свойствами РВ и проявляется при изменении высоты полета в виде запаздывания показаний относительно текущих значений истинной высоты. Для уменьшения динамической погрешности требуется выбирать возможно меньшую величину постоянной времени РВ. Однако это ведет к увеличению флюктуационной Погрешности, обусловленные полетными эволюциями ВС, возникают, поскольку антенны РВ являются направленными. При крене и тангаже ВС, в случае отражения от гладкой земной поверхности отраженный сигнал может не попасть в приемную антенну, в случае же отражения от шероховатой поверхности будет измеряться не высота полета, а наклонная дальность, при этом показания будут завышенными. Поэтому при полетах с углами крена самолета от 15 до 30° погрешности в показаниях РВ могут превышать допустимые пределы, оговоренные в технических характеристиках, а при кренах свыше 30° пользование РВ становится нецелесообразным. Основные параметры Основные технические параметры, характеризующие возможности отечественных РВ, приведены в таблице.
Состав аппаратуры В состав РВ входят следующие блоки: 1. Приемопередатчик ПП-5 (РВ-5), ПП-5М (РВ-5М), А-037-1 (А-037) в отсеке оборудования на амортизационной раме РА-5, контрольный разъем «Контроль РВ». Служит для генерирования и приема частотно-модулированных колебаний, сравнения частот прямого и отраженного сигналов, выделения разностной частоты, преобразования частоты в напряжение или интервал времени, регистрации отказа и контроля измерительных цепей. Контрольный разъем служит для подключения контрольно-проверочной аппаратуры при выполнении регламентных и ремонтных работ. 2. Рупорные антенны АР5-1 (РВ-5, РВ-5М), А-037-2, АР5-4 (А-037) – 2 шт. Взаимозаменяемые приемная и передающая антенны находятся в нижней части фюзеляжа по оси ВС, либо слева и справа. Рупорные антенны позволяют осуществить их скрытый монтаж при малом расстоянии между передающей и приемной антеннами. Последнее обеспечивает уменьшение погрешности из-за несовпадения осей этих антенн до пренебрежимо малой величины вплоть до 0,6 м. Рупорные антенны обеспечивают хорошее согласование тракта СВЧ в широкой полосе частот. Ширина ДНА по уровню половинной мощности составляет 40–50°. Благодаря этому, а также некоторому запасу мощности передатчика, РВ может нормально функционировать при эволюциях самолета по крену до ±(20–30)° и тангажу до ±(17–25)°. Коэффициент направленного действия антенн 15–18. 3. Указатель высоты УВ-5 (РВ-5), УВ-5М (РВ-5, РВ-5М), А-034-4 (РВ-5М, А-037) на приборной доске. Предназначен для визуальной индикации текущей истинной высоты полета, установки значения сигнализируемой заданной высоты, индикации отказа РВ и световой индикации полета ниже заданной высоты. Кроме этого, в кабине предусмотрены табло, сигнализирующие о достижении ВПР, расположенные обычно в верхней части или на козырьках приборных досок пилотов.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-20; просмотров: 277; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.138.200.66 (0.03 с.) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 . (1)
. (1) ,
,  , BC = F р, DE = Δ f. Подставив эти значения в выражение (1), получим
, BC = F р, DE = Δ f. Подставив эти значения в выражение (1), получим , (2)
, (2)
 (3)
(3) , а дискретность точных измерений (погрешность дискретности при n = 1) –
, а дискретность точных измерений (погрешность дискретности при n = 1) –  .
. , следовательно, уменьшить методическую погрешность возможно увеличением девиации частоты D f. В радиовысотомере РВ-5 для уменьшения методической погрешности осуществляют модуляцию несущей двумя частотами: основной FM 1 = 150 Гц и дополнительной FM 2 = 25 Гц.
, следовательно, уменьшить методическую погрешность возможно увеличением девиации частоты D f. В радиовысотомере РВ-5 для уменьшения методической погрешности осуществляют модуляцию несущей двумя частотами: основной FM 1 = 150 Гц и дополнительной FM 2 = 25 Гц. , где D Н 1 – методическая ошибка РВ при модуляции частотой FM 1, D Н 12 – методическая ошибка РВ при модуляции частотами FM 1 и FM 2.
, где D Н 1 – методическая ошибка РВ при модуляции частотой FM 1, D Н 12 – методическая ошибка РВ при модуляции частотами FM 1 и FM 2.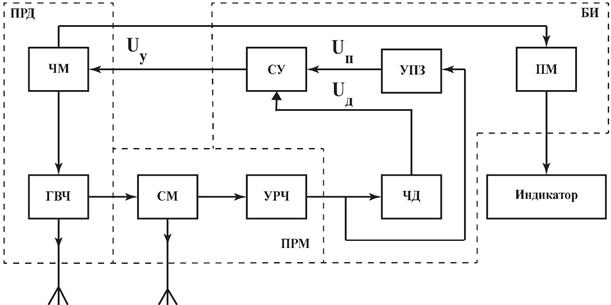
 (4)
(4) (5)
(5) и от высоты H.
и от высоты H.
 Частотный детектор ЧД вырабатывает постоянное напряжение U Д, пропорциональное отклонению разностной частоты Fр от частоты настройки детектора f 0 (рис. 2.7). В РВ-5М f 0 = 30 кГц. Это напряжение через суммирующее устройство СУ вместе с зафиксированным напряжением поиска U п устройства поиска и захвата УПЗ поступает на частотный модулятор ЧМ. Под действием управляющего напряжения Uy изменяется длительность прямого хода модулирующего напряжения, следовательно, период модуляции зондирующего сигнала TM. Это происходит до тех пор, пока частота F р не станет равной частоте настройки дискриминатора f 0.Таким образом, в режиме слежения реализуется выражение (6): длительность прямого хода TM модулирующего напряжения пропорциональна высоте полета H.
Частотный детектор ЧД вырабатывает постоянное напряжение U Д, пропорциональное отклонению разностной частоты Fр от частоты настройки детектора f 0 (рис. 2.7). В РВ-5М f 0 = 30 кГц. Это напряжение через суммирующее устройство СУ вместе с зафиксированным напряжением поиска U п устройства поиска и захвата УПЗ поступает на частотный модулятор ЧМ. Под действием управляющего напряжения Uy изменяется длительность прямого хода модулирующего напряжения, следовательно, период модуляции зондирующего сигнала TM. Это происходит до тех пор, пока частота F р не станет равной частоте настройки дискриминатора f 0.Таким образом, в режиме слежения реализуется выражение (6): длительность прямого хода TM модулирующего напряжения пропорциональна высоте полета H.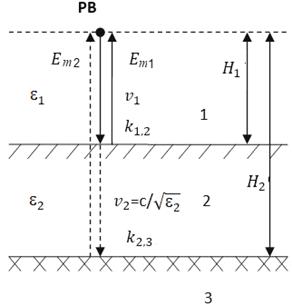

 .
. , т. к.
, т. к.  (воздух),
(воздух),  (вода), поэтому Em 1 >> Em 2. РВ измеряет высоту над водной поверхностью Н 1, и вследствие большого коэффициента отражения обеспечивает над водной поверхностью наибольшую высотность.
(вода), поэтому Em 1 >> Em 2. РВ измеряет высоту над водной поверхностью Н 1, и вследствие большого коэффициента отражения обеспечивает над водной поверхностью наибольшую высотность. , так как для соленого льда
, так как для соленого льда  . Это значит, что большая часть сигнала проходит в лед и в нем распространяется. Соленый лед вносит очень большое затухание: 100–150 дБ/м на частоте 10 ГГц (для a = 100 дБ/м при прохождении радиоволной каждого метра ее амплитуда уменьшается в 105 раз), поэтому, как и в предыдущем случае, Em 1 >> Em 2. Следовательно, РВ при меньшей высотности будет измерять высоту до поверхности соленого льда.
. Это значит, что большая часть сигнала проходит в лед и в нем распространяется. Соленый лед вносит очень большое затухание: 100–150 дБ/м на частоте 10 ГГц (для a = 100 дБ/м при прохождении радиоволной каждого метра ее амплитуда уменьшается в 105 раз), поэтому, как и в предыдущем случае, Em 1 >> Em 2. Следовательно, РВ при меньшей высотности будет измерять высоту до поверхности соленого льда. , т. к. для пресного льда
, т. к. для пресного льда  , т. е. амплитуда отраженного от пресного льда сигнала много меньше амплитуды падающей радиоволны. В отличие от соленого льда пресный не вносит большого затухания. Для него a = 1,5 дБ/м на частоте 10 ГГц. По этой причине сигнал, распространяющийся в пресном льду и отраженный от нижней границы льда, может иметь амплитуду, большую или сравнимую с амплитудой сигнала, отраженного от поверхности льда. РВ в таких условиях пользоваться нельзя, т. к. он будет измерять высоту большую чем до поверхности льда. Впервые на это явление обратили внимание при полетах в Антарктике.
, т. е. амплитуда отраженного от пресного льда сигнала много меньше амплитуды падающей радиоволны. В отличие от соленого льда пресный не вносит большого затухания. Для него a = 1,5 дБ/м на частоте 10 ГГц. По этой причине сигнал, распространяющийся в пресном льду и отраженный от нижней границы льда, может иметь амплитуду, большую или сравнимую с амплитудой сигнала, отраженного от поверхности льда. РВ в таких условиях пользоваться нельзя, т. к. он будет измерять высоту большую чем до поверхности льда. Впервые на это явление обратили внимание при полетах в Антарктике. с вероятностью 0,95, где
с вероятностью 0,95, где  – измеренное значение (оценка) высоты. Для РВ, используемых при приземлении в сложных метеоусловиях, величина 2s должна быть не более ±1 м.
– измеренное значение (оценка) высоты. Для РВ, используемых при приземлении в сложных метеоусловиях, величина 2s должна быть не более ±1 м.


