
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Реализация алгоритма для исходных данных в матричной форме ⇐ ПредыдущаяСтр 7 из 7
Данная реализация алгоритма предназначена для выполнения задачи, описанной во теоретической части исследования: в системе ОКТ происходит считывание видеокадров в режиме реального времени, которые при обработке возможно преобразовать в микротомограммы (B-сканы), необходимые для построения трёхмерной модели исследуемого объекта в реальном времени. B-сканы - это распределение коэффициента отражения света (оптической плотности) по глубине среды в выбранном поперечном сечении []. Благодаря трёхмерной модели можно визуализировать информацию о микроструктуре и микрорельефе поверхности исследуемого объекта []. Для считывания оптимального количества видеокадров нужно производить оценку компонент получаемого из исходных изображений сигнала (1). Для этой цели возникает задача реализации фильтра Калмана в матричной форме, так как изображения представляют собой матрицы пикселей, где каждый пиксель содержит определенное значение интенсивности. На предыдущем этапе производилась оценка компонент сигнала, образованного одним пикселем с одинаковыми координатами для всех изображений. Матричный фильтр Калмана производит оценку для компонент сигналов, образованных из всех пикселей каждого считываемого видеокадра. Матричная форма фильтра Калмана реализована следующим образом: [НБ14] на вход алгоритма поступает изображение, соответствующий отсчёт сигнала инициализируется усреднённым значением интенсивности по соседним пикселям: алгоритм проходит по изображению с шагом в 7 пикселей по x-координате и таким же шагом по y-координате, и в сигнал попадает усреднённое значение соседних пикселей в пределах шага. Матрица перехода H, коэффициент усиления фильтра P и вектор параметров
После прохода алгоритма по одному исходному изображению полученные оценки амплитуды сигнала добавляются в матрицу выходных изображений для B-сканов. Когда обработка всех исходных изображений заканчивается и матрица выходных изображений заполнена данными для B-сканов, выполняется нормировка значений: каждый столбец B-скана обрабатывается таким образом, чтобы диапазон его значений был «растянут» от 0 до 255. Далее обработанные значения B-сканов сохраняются в выходные изображения в несжимаемом формате (например, PNG). Пример полученного B-скана представлен на рис. 19.
Рис.19. Пример выходного изображения, представляющего B-скан Содержимое B-скана, представленного на рис.19, интерпретируется следующим образом: ярко выраженные линии белого цвета, находящиеся под углом – срезы рельефа исследуемого объекта, соответствующие амплитудам интерферометрических сигналов, вертикальные линии по всей высоте изображения – возникающие шумы при оценке фоновой компоненты [16]. Каждый из полученных B-сканов несушественно отличается друг от друга, так как они представляют срез рельефа исследуемого объекта в различных местах. Для подбора верных настроек к матричной форме алгоритма, а именно – значений ковариационных матриц R pr и R n – алгоритм был запущен для одного пикселя с определёнными координатами (к примеру, в центре исходных изображений), чтобы получить одномерный сигнал и по графикам оценок визуально определить корректность настроек. Это целесообразно, так как подбор настроек для полной версии алгоритма занял бы значительно больше времени, так как матричный фильтр обрабатывает все области пикселей исходных изображений. В данном случае опытным путём были подобраны следующие значения для R pr и R n: [НБ15]
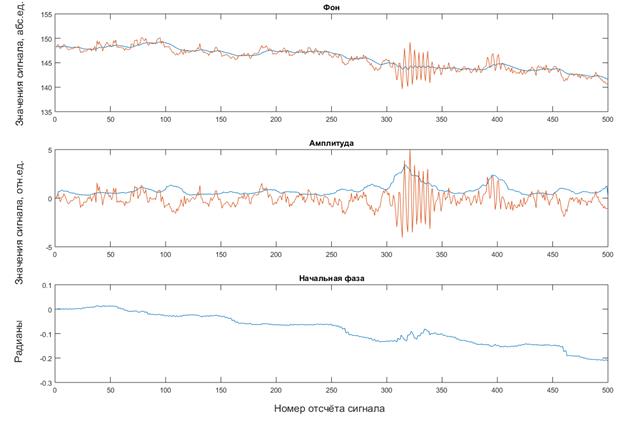
При таких настройках были получены следующие результаты, графики которых представлены на рис.20:
Рис.20. Графики результатов матричного фильтра при обработке одномерного сигнала[НБ16]
Полученные графики говорят о том, что настройки для матричного фильтра подобраны верным образом и могут быть применены для полноценной обработки исходных изображений.
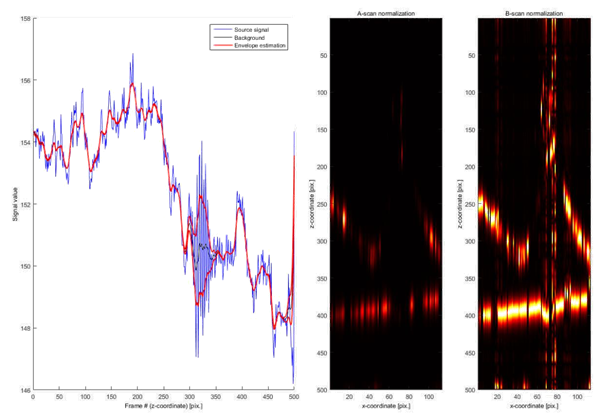
Чтобы убедиться в правильности результатов работы фильтра Калмана, исходный набор изображений был протестирован в приложении, в котором реализована обработка интерферометрических сигналов, где требуется полная реализация исходного сигнала (Волынский М.А. Программа для обработки четырехмерных данных в корреляционной оптической когерентной томографии. Свидетельство об официальной регистрации программы для ЭВМ № 2018619064 от 27.07.2018 г.). Данное приложение предназначено для аналогичных целей: получить информацию о микроструктуре обрабатываемого физического объекта путём построения B-сканов, которые можно преобразовать в трёхмерную модель. Результаты работы приложения
Рис.21. Результаты работы программы для обработки интерферометрических сигналов с помощью преобразования Фурье На рис.21 в левой части отображён сигнал, полученный из исходных изображений. В крайней правой части представлен график одного из полученных B-сканов. При сравнении данного графика с рис.19 заметно, что пример B-скана, полученный с помощью фильтра Калмана, соответствует B-скану, полученному с помощью описанной выше программы. После получения набора B-сканов с помощью матричного фильтра Калмана из этого набора была составлена 3D-модель рельефа исследуемого объекта. Для этой задачи было использовано программное обеспечение Voxx 2.0. и ImageJ. Набор B-сканов в виде PNG-изображений был преобразован в формат TIFF с помощью программы ImageJ, затем в программе Voxx последовательность TIFF-изображений была преобразована в 3D-модель.
Рис. 22. Последовательность B-сканов, преобразованная в 3D-модель
Инструментарий Voxx позволяет редактировать объекты таким образом, чтобы получить наиболее наглядную и точную визуализацию построенной модели. Путём изменения длины, ширины и высоты модели, а также с помощью уменьшения альфа-канала B-сканов была получена модель объекта, представленная на рис.23. Рис.23. Преобразованная 3D-модель объекта
Благодаря данной 3D-модели становится возможным визуализировать микрорельеф поверхности и внутреннюю микроструктуру исследуемого объекта, рассмотрев его модель под различными ракурсами и получить детальное представление о его физическом устройстве[НБ17]. Крыло комара, при съёмке которого был получен первоначальный набор экспериментальных данных, - частично прозрачный физический объект. Это значит, что из B-скана такого объекта можно заполучить информацию о рельефе, а также о подповерхностных структурах. Другой объект, для которого были получены экспериментальные данные, является оптически однослойным – его В-сканы отражают информацию только о рельефе. [НБ18] Аналогичным образом с помощью матричного фильтра Калмана был обработан другой набор экспериментальных данных, график которого представлен на рис. 17. Пример одного из полученных для данного сигнала B-сканов показан на рис.24.
Рис.24. Пример B-скана для других экспериментальных данных Как и для начальных экспериментальных данных, была составлена единая последовательность изображений в формате TIFF с помощью программы ImageJ, а затем последовательность B-сканов была преобразована в 3D-модель с помощью Voxx. Итоговый результат представлен на рис. 25.
Рис.25. 3D-модель, построенная для других экспериментальных данных
Выводы по главе 3 При обработке различных экспериментальных данных фильтром [НБ19] Калмана в скалярной форме не требуется подбирать разные настройки. Также выяснилось, что при использовании фильтра Калмана для обработки экспериментальных сигналов в векторе параметров
Заключение Был разработан, исследован и программно реализован алгоритм метода калмановской фильтрации для прогнозирования компонент интерферометрического сигнала малой когерентности, полученного в системе ОКТ. Была произведена настройка точности фильтра путём подбора различных значений ковариационной матрицы ошибки и ковариационной матрицы шума системы. Для смоделированных сигналов с изменяемым количеством отсчётов на период реализованный алгоритм показал приемлемые результаты, при этом настройки точности фильтра не изменились при расширении параметров фильтра после добавления новой фильтруемой компоненты, определяющей количество отсчётов на период сигнала. При расчёте погрешностей для смоделированных сигналов было выявлено, что полученные результаты позволяют сформировать рекомендации к эффективному применению калмановской фильтрации для обработки интерферометрических сигналов малой когерентности. Данный алгоритм позволяет получить удовлетворительные результаты при анализе сигналов с количеством отсчётов на периоде, соответствующим критерию Найквиста, при этом сигнал может иметь небольшое количество отсчетов на периоде (несколько единиц), а существенное увеличение количества отсчетов не приводит к повышению точности оценивания.
Для проверки работоспособности реализованного алгоритма были обработаны 2 набора различных исходных данных, полученных в системе ОКТ, для обоих наборов фильтр показал корректные результаты оценивания, что позволило перейти к реализации матричной формы. При реализации матричной формы расширенного фильтра Калмана его скалярная форма была модифицирована таким образом, что алгоритм использует аналогичные компоненты, описанные в уравнениях (3)-(8), но расширенные для обработки экспериментальных данных целиком по X- и Y-координатам исходных изображений.
При сравнении графиков данной реализации фильтра Калмана и реализации спектрального анализа интерферометрических сигналов с помощью преобразования Фурье получились аналогичные результаты, в результате чего можно сделать вывод о корректной работе алгоритма калмановской фильтрации. [НБ1]Как быть с нумерацией? [НБ2]Поправить порядок ссылок на литературу [НБ3]Нужно ли здесь снова приводить расшифровку? [НБ4]Стоит перефразировать [НБ5]Нужно ли будет объяснить, что такое f? [НБ6]Вставить график, где лимит оси Y от -1 до 1 [НБ7]Нужно график с подписанной осью Х [НБ8]Можно ли использовать диагональную черту как знак деления в нижнем уравнении?
[НБ9]Также подпись по горизонтали [НБ10]
[НБ11]Нужно переформулировать и описать более подробно, что тут происходит [НБ12]Потом добавить нормальный график с белым фоном [НБ13]Подпись по горизонтали [НБ14]Здесь можно добавить про подбор новых оценок для матричного фильтра, [НБ15]MS Equation почему то не работает в этом ворде, значения надо пофиксить [НБ16]Подпись по горизонтали [НБ17]перефразировать [НБ18]Из этих суждений нужен некоторый вывод [НБ19]Часть 3.1 [НБ20]Про часть 3.2
|
||||||||
|
|
Последнее изменение этой страницы: 2021-04-12; просмотров: 38; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.141.47.221 (0.026 с.) |
 преобразуются к матрицам, каждый элемент которых – вектор из трёх компонент, каждый из которых соответствует пикселю изображения с соответствующими координатами. Алгоритм модифицирован таким образом, что на каждом шаге сначала оценивается значение фона сигнала, затем оно вычитается из исходного сигнала, и далее происходит оценивание компонент амплитуды и фазы сигнала с вычтенным на предыдущем шаге фоном. Такая модификация сделана для достижения более оптимальных оценок амплитуды, из которых состоят B-сканы исходных обрабатываемых изображений.
преобразуются к матрицам, каждый элемент которых – вектор из трёх компонент, каждый из которых соответствует пикселю изображения с соответствующими координатами. Алгоритм модифицирован таким образом, что на каждом шаге сначала оценивается значение фона сигнала, затем оно вычитается из исходного сигнала, и далее происходит оценивание компонент амплитуды и фазы сигнала с вычтенным на предыдущем шаге фоном. Такая модификация сделана для достижения более оптимальных оценок амплитуды, из которых состоят B-сканы исходных обрабатываемых изображений. 
 =
=  ,
, .
.
 приведены на рис. 21.
приведены на рис. 21.



 , описанный в уравнении (2). Для обработки экспериментальных сигналов использование этого параметра не нужно, так как частота таких сигналов успешно фильтруется во время обработки. Для подбора настроек матричного фильтра можно использовать его как [НБ20] скалярный, обрабатывая одномерный сигнал из всех изображений. Полученные настройки позволили провести наиболее корректную обработку изображений, чтобы получить максимально точные оценки. При сравнении 3D-моделей, полученных для различных экспериментальных данных (рис.23 и рис.25) можно сделать вывод, что структура микрорельефа исследованных физических объектов, с использованием которых проводилась съёмка в системе корреляционной ОКТ, существенно различается. По 3D-модели, представленной на рис.25, невозможно сделать наблюдения касаемо микрорельефа поверхности, так как искомый объект является оптически однослойным.
, описанный в уравнении (2). Для обработки экспериментальных сигналов использование этого параметра не нужно, так как частота таких сигналов успешно фильтруется во время обработки. Для подбора настроек матричного фильтра можно использовать его как [НБ20] скалярный, обрабатывая одномерный сигнал из всех изображений. Полученные настройки позволили провести наиболее корректную обработку изображений, чтобы получить максимально точные оценки. При сравнении 3D-моделей, полученных для различных экспериментальных данных (рис.23 и рис.25) можно сделать вывод, что структура микрорельефа исследованных физических объектов, с использованием которых проводилась съёмка в системе корреляционной ОКТ, существенно различается. По 3D-модели, представленной на рис.25, невозможно сделать наблюдения касаемо микрорельефа поверхности, так как искомый объект является оптически однослойным. 


