Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Понятие о взаимном ориентировании снимков
Геометрической основой взаимного ориентирования снимков является компланарность трех векторов (рис.4.1): которая выражается следующим смешанным произведением.
В координатной форме этому условию соответствует равенство следующего определителя
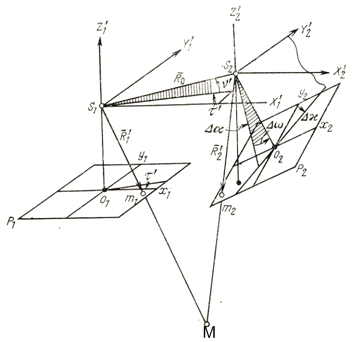
В фотограмметрии уравнение (4.12) называют уравнением компланарности. Рассмотрим теперь элементы взаимного ориентирования снимков Пара снимков может быть ориентирована двумя способами: 1-й способ подразумевает ориентирование каждого снимка по известным элементам внешнего ориентирования, как показано на рис.3.2. Т.о. пара снимков здесь ориентируется своими элементами: - - Во 2-ом способе правый снимок ориентируется относительно левого. Он имеет две разновидности или две системы взаимного ориентирования 1 система: Неподвижным считается базис фотографирования (4.3). Здесь правый снимок ориентируется относительно левого. Положение точки М здесь определяется в системе координат X′, Y′, Z′. Ось X′ совпадает с базисом фотографирования. Ось Z′ -перпендикулярна к базису. Угол α′1 лежит в базисной плоскости. Угол æ′1 строится по оси Y′. Таким образом, элементами внешнего ориентирования левого снимка будут:
Рис. 4.3.Первая система взаимного ориентирования
Правый снимок ориентируется относительно левого следующими элементами: Тогда элементами взаимного ориентирование будут: α′1, æ′1, 2 система: Неподвижным является левый снимок (рис.4.4). Элементами внешнего ориентирования снимков в системе координат левого здесь являются: -- - Тогда элементами взаимного ориентирования будут: B,
Рис. 4.4. Вторая система взаимного ориентирования Элементы взаимного ориентирования определяются из уравнения компланарности (4.12). Поскольку в каждой системе по 6 элементов взаимного ориентирования, то уравнений (4.12) составляется не менее шести. Их приводят к линейному виду при определенных приближенных значениях искомых элементов и из решения по методу наименьших квадратов находят поправки к соответствующим приближенным значениям. К приближенным значениям прибавляют соответствующие поправки и получают окончательные значения элементов взаимного ориентирования.
По элементам взаимного ориентирования строится фотограмметрическая модель в системе координат левого снимка в соответствии с формулами(4.4). Далее по опорным точкам можно вычислить координаты фотограмметрической модели в геодезической системе координат. Такой процесс называется внешним ориентированием модели.
|
|||||||
|
|
Последнее изменение этой страницы: 2021-04-12; просмотров: 110; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.6.77 (0.005 с.) |
 ,
,  и
и  =
=  ,
,
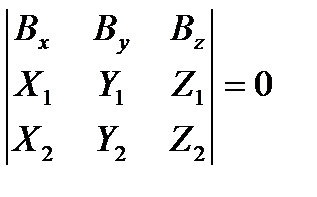 (4.12)
(4.12)
 ,
,  ,α1,ω1,æ1,
,α1,ω1,æ1, ,
,  ,
,  ,α2,ω2,æ2
,α2,ω2,æ2 ,
,  ,
,  , α′1, ω′1=0, æ′1.
, α′1, ω′1=0, æ′1.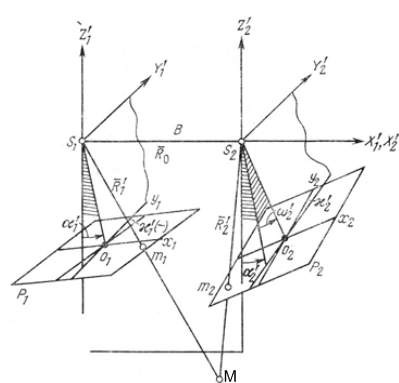
 ,
,  ,
,  , α′2, ω′2, æ′2.
, α′2, ω′2, æ′2. ,
,  ,
,  ,α=0,ω=0,æ=0 для левого снимка
,α=0,ω=0,æ=0 для левого снимка ,
,  ,,
,,  , α2=∆α, ω2=∆ω, æ2=∆æ для правого.
, α2=∆α, ω2=∆ω, æ2=∆æ для правого. ,
,  , ∆α, ∆ω, ∆æ.
, ∆α, ∆ω, ∆æ.