
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Соединение звездой четырехпроводной с нейтральным проводом без сопротивления.
Схема замещения анализируемой цепи приведена на рис. 4.58.
Рис. 4.58 Приемник несимметричный. Из схемы видно, что при соединении фаз приемника звездой фазные и линейные токи соответственно равны между собой, например Нейтральный провод с нулевым сопротивлением соединяет нейтральные точки генератора и приемника, следовательно, их потенциалы равны между собой: Если сопротивлением линии пренебрегают, то потенциалы начал фаз генератора и приёмника одинаковы: Линейные и фазные токи определяют по закону Ома:
Ток в нейтральном проводе Топографические диаграммы напряжений генератора и приемника совпадают. Нейтральный провод обеспечивает симметрию фазных напряжений приемника при несимметричной нагрузке. Векторы фазных токов ориентируют относительно векторов соответствующих фазных напряжений приемника в зависимости от нагрузки фаз. Вектор тока в нейтральном проводе Приемник симметричный. Если приемник симметричный, токи в фазах и линиях равны между собой по величине и сдвинуты относительно друг друга по фазе на
Тогда Ток в нейтральном проводе Мощности трехфазных цепей. В трехфазных цепях различают те же мощности, что и в однофазных: мгновенную р, активную Р, реактивную Q и полную S. Мощности р, Р и Q находят как суммы мощностей трех фаз: Мощности каждой фазы вычисляют по известным формулам. Потребляемой является активная мощность. Активную мощность фазы проще всего определить по формуле Реактивную мощность фазы ищут следующим образом:
Полную мощность трехфазной цепи вычисляют как гипотенузу суммарного треугольника мощностей:
При симметричной нагрузке мощности фаз одинаковы, поэтому
При соединении звездой
Вращающееся магнитное поле и его применение.
Развитие трехфазных систем связано с широким применением электродвигателей переменного тока. Принципы работы электрических машин переменного тока основаны на использовании вращающихся магнитных полей, которые получаются с помощью многофазных (чаще всего трехфазных) систем. Электрические машины делятся на две большие категории: генераторы, которые служат для преобразования механической энергии в электрическую, и двигатели, которые преобразуют электрическую энергию в механическую. Машины переменного тока в свою очередь делятся на асинхронные и синхронные. Статор асинхронной машины создает вращающееся магнитное поле, а ротор вращается с меньшей скоростью, т. е. асинхронно. Увеличение нагрузки двигателя вызывает уменьшение скорости вращения ротора. Асинхронная машина была изобретена М. О. Доливо-Добровольским еще в 1888 г., но до настоящего времени сохранила свои основные черты. В синхронной машине скорость вращения ротора совпадает со скоростью вращения магнитного поля статора и не зависит от нагрузки двигателя. Все электрические машины обратимы, т. е. могут служить как двигателями, так и генераторами. Асинхронные машины используются главным образом как двигатели, а синхронные — и как двигатели, и как генераторы. Практически все генераторы переменного тока — синхронные. Принцип работы асинхронных двигателей основан на опыте Араго. Если под горизонтально подвешенным на нити диском из проводящего немагнитного материала (например, из меди) поместить вращающийся подковообразный магнит, то диск начнет вращаться в ту же сторону, что и магнит. Это явление объясняется следующим образом. Вращающееся магнитное поле, создаваемое магнитом, индуцирует в диске замкнутые вихревые токи. Эти вихревые токи, в соответствии с законом Ампера, взаимодействуют с вращающимся магнитным полем, благодаря чему создается вращающий момент. Диск начинает вращаться в ту же сторону, что и поле, причем по мере увеличения скорости диска скорость диска относительно поля уменьшается, что приводит к уменьшению величины индукционных токов в диске и вращающего момента. Диск начинает приостанавливаться, и скорость диска относительно поля увеличивается, что приводит к повышению величины индукционных токов в диске и вращающего момента. В конце концов, установится равновесие, при котором диск будет вращаться с некоторой постоянной скоростью, которая меньше скорости вращения магнитного поля, т. е. вращение диска будет асинхронным.
Вот это явление асинхронного вращения диска из проводящего немагнитного материала во вращающемся магнитном поле и положено в основу устройства асинхронных двигателей. Круговым вращающимся магнитным полем называется поле, вектор магнитной индукции которого, не изменяясь по модулю, вращается в пространстве с постоянной угловой частотой. Для создания кругового вращающегося поля необходимо выполнение двух условий: 1. Оси катушек должны быть сдвинуты в пространстве друг относительно друга на определенный угол (для двухфазной системы – на 900, для трехфазной – на 1200). 2. Токи, питающие катушки, должны быть сдвинуты по фазе соответственно пространственному смещению катушек. Рассмотрим получение кругового вращающегося магнитного поля в случае двухфазной системы Тесла (рис. 4,59 а).
Рис. 4.59 Модуль результирующего вектора магнитной индукции в соответствии с рис. 4.59 в равен
при этом для тангенса угла
откуда Полученные соотношения (1) и (2) показывают, что вектор результирующего магнитного поля неизменен по модулю и вращается в пространстве с постоянной угловой частотой При пропускании через катушки гармонических токов каждая из них в соответствии с вышесказанным будет создавать пульсирующее магнитное поле. Векторы Найдем проекции результирующего вектора магнитной индукции
Покажем, что симметричная трехфазная система катушек (см. рис. 4.60 а) также позволяет получить круговое вращающееся магнитное поле. Каждая из катушек А, В и С при пропускании по ним гармонических токов создает пульсирующее магнитное поле. Векторная диаграмма в пространстве для этих полей представлена на рис. 4.60 б. Для проекций результирующего вектора магнитной индукции на оси декартовой системы координат, ось y у которой совмещена с магнитной осью фазы А, можно записать
Рис. 4.60 Приведенные соотношения учитывают пространственное расположение катушек, но они также питаются трехфазной системой токов с временным сдвигом по фазе на 1200. Поэтому для мгновенных значений индукций катушек имеют место соотношения
Подставив эти выражения в (181) и (182), получим:
В соответствии с этими выражениями и рис. 4.59 в для модуля вектора магнитной индукции результирующего поля трех катушек с током можно записать:
а сам вектор
откуда Таким образом, и в данном случае имеет место неизменный по модулю вектор магнитной индукции, вращающийся в пространстве с постоянной угловой частотой С целью усиления и концентрации магнитного поля в электрической машине для него создается магнитная цепь. Электрическая машина состоит из двух основных частей (см. рис. 4.61): неподвижного статора и вращающегося ротора, выполненных соответственно в виде полого и сплошного цилиндров. На статоре расположены три одинаковые обмотки, магнитные оси которых сдвинуты по расточке магнитопровода на 2/3 полюсного деления
где На рис. 4.61 сплошными линиями (А, В и С) отмечены положительные направления пульсирующих магнитных полей вдоль осей обмоток А, В и С.
Рис. 4.61 После некоторых преобразований для результирующего поля вдоль воздушного зазора машины получим выражение
представляющее собой уравнение бегущей волны. Магнитная индукция
то магнитная индукция для этой точки будет оставаться неизменной. Это означает, что с течением времени кривая распределения магнитной индукции, не меняя своей формы, перемещается вдоль окружности статора. Следовательно, результирующее магнитное поле вращается с постоянной скоростью. Эту скорость принято определять в оборотах в минуту:
Асинхронный двигатель.
Устройство асинхронного двигателя соответствует изображению на рис. 4.61. Вращающееся магнитное поле, создаваемое расположенными на статоре обмотками с током, взаимодействует с токами ротора, приводя его во вращение. Наибольшее распространение в настоящее время получил асинхронный двигатель с короткозамкнутым ротором ввиду своей простоты и надежности. В пазах ротора такой машины размещены токонесущие медные или алюминиевые стержни. Концы всех стержней с обоих торцов ротора соединены медными или алюминиевыми же кольцами, которые замыкают стержни накоротко. Отсюда и произошло такое название ротора.
В короткозамкнутой обмотке ротора под действием ЭДС, вызываемой вращающимся полем статора, возникают вихревые токи. Взаимодействуя с полем, они вовлекают ротор во вращение с частотой Величина На рис. 4.62 построена линейная характеристика В режиме двигателя (
Рис. 4.62 В режиме генератора ( В режиме электромагнитного тормоза ( Асинхронные машины используются в основном в качестве двигателей.
Паспортные данные.
Чтобы подключить к сети асинхронный двигатель, нужно узнать, на какое напряжение он рассчитан, какие схемы соединения обмоток допустимы, какие токи в момент пуска возникнут. Для этого нужно обратиться к паспортным данным двигателя, которые указаны в табличке, расположенные на его корпусе. Эту табличку также называют шильдиком, на котором указаны основные необходимые данные АД, в котором кроме выше перечисленного, указывается номер двигателя, номинальная мощность и обороты, КПД, коэффициент мощности, режим работы, класс изоляции, ГОСТ, год изготовления двигателя и завод. Для примера рассмотрим табличку двигателя АИР71А4У3
Тип двигателя - АИР71А4У3, где “А”- асинхронный двигатель “И” – Интерэлектро “Р” – привязка мощностей к установочным размерам по ГОСТ Р 51689 “71” – высота оси вращения вала, мм “А” – установочный размер по длине статора “4” – число полюсов
“У3” – климатическое исполнение, для умеренного климата Ниже идут характеристики двигателя: 3 Ф - 50 Hz –питание от трехфазной сети, с частотой тока 50 Гц
2.8/1.8 А – отношение максимального тока к номинальному 0.55 KW – номинальная мощность двигателя, КВт 1360 r/min – номинальная частота вращения, об/мин КПД – 71 % - коэффициент полезного действия cosφ 0.73 – коэффициент мощности Режим S1 – продолжительный режим работы Кл.изол. F – класс изоляции, предельная температура при длительном режиме работы – 155 C. IP54 – степень защиты Подобным образом расшифровываются все асинхронные двигатели. Разумеется, шильдики в зависимости от завода и года двигателя, могут различаться, но основные паспортные данные, представлены в таком же объеме, как и на примере выше.
Синхронный двигатель.
Принципиальное отличие синхронного двигателя от асинхронного заключается в исполнении ротора. Последний у синхронного двигателя представляет собой магнит, выполненный (при относительно небольших мощностях) на базе постоянного магнита или на основе электромагнита. Поскольку разноименные полюсы магнитов притягиваются, то вращающееся магнитное поле статора, которое можно интерпретировать как вращающийся магнит, увлекает за собой магнитный ротор, причем их частота вращения одинакова и равна Трехфазная синхронная машина может работать в режимах генератора и двигателя.
Рис. 4.63 Режим генератора. ЕСЛИ К валу машины приложить вращающийся момент от первичного двигателя, То ось магнитных полюсов ротора повернется на некоторый угол Режим двигателя. Если к валу машины приложить тормозной момент механической нагрузки, то ось магнитных полюсов ротора повернется на некоторый угол Синхронная машина работает в режиме генератора или двигателя в зависимости от механического воздействия на вал машины, причем электромагнитные силы играют роль своеобразной упругой связи между ротором и статором. В заключение отметим, что в отличие от асинхронного двигателя,
Расчет двигателя.
Расчет и построение механической характеристики производят по каталожным данным двигателя. В каталоге приводятся следующие данные: тип двигателя, P ном, U ном, I ном, n ном, ηном, cos φном, М max /М ном = λ. Для двигателя с короткозамкнутым ротором дополнительно даются отношение пускового момента к номинальному (М п/ М ном) и отношение пускового тока к номинальному (I п/ I ном); для двигателя с фазным ротором — напряжение между кольцами при неподвижном и разомкнутом роторе U 2k = E 2k и номинальный ток ротора I 2ном. Буквенные и цифровые обозначения типа двигателя позволяют, например, судить о назначении двигателя, его габаритной мощности, числе пар полюсов и т. д. Поскольку существует большое число типов двигателей и в каталогах даны пояснения, что означает каждая буква и цифра, останавливаться на этом в книге нет необходимости. Номинальной мощностью Р ном двигателя общего назначения длительного режима работы называется мощность, которую двигатель может длительно развивать на валу, нагреваясь при этом до допустимой температуры, обусловленной классом изоляции его обмоток. В двигателе возникают потери мощности, которые нагревают его. Вначале, когда двигатель имеет температуру окружающей среды, большая часть мощности потерь расходуется на повышение его температуры, а меньшая рассеивается в окружающую среду. С повышением температуры двигателя большая часть мощности потерь рассеивается в окружающую среду. По прошествии определенного времени наступает тепловое равновесие: вся мощность потерь, выделяющихся в двигателе, рассеивается в окружающую среду, и температура двигателя при заданной нагрузке остается неизменной. Повышение температуры двигателя выше допустимой вызывает ухудшение механической и электрической прочности изоляции. При этом изменяется структура изоляции и в конце концов происходит ее пробой и выход двигателя из строя. Можно ли нагружать двигатель мощностью больше номинальной? Можно кратковременно, если до этого двигатель работал с недогрузкой и его температура была ниже допустимой. Длительность и степень перегрузки в совокупности должны быть такими, чтобы в результате температура двигателя не превышала допустимую. На паспорте двигателя обычно указываются два значения номинального напряжения, например, 380/220 В. Это означает, что данный двигатель рассчитан для работы с напряжением на фазе его обмотки 220 В. Для включения двигателя в сеть с линейным напряжением 380 В его обмотки соединяются звездой, а в сеть с линейным напряжением 220 В — треугольником. Соответственно указываются и два значения линейного номинального тока обмотки статора для соединения звездой и треугольником. Далее в каталоге приводятся номинальные значения частоты вращения, КПД ηном, коэффициента мощности cos φном, которыми обладает двигатель при номинальной нагрузке на его валу. При этом предполагается, что напряжение и частота соответствуют паспортным данным.
Рис. 4.64. График зависимости потока двигателя от намагничивающего тока (а); механическая характеристика двигателя с учетом пускового момента М п, заданного в каталоге (б) Следует отметить, что длительная работа двигателя при повышенном или пониженном напряжении недопустима, особенно при номинальной нагрузке на его валу. В том и другом случае ток в обмотках оказывается больше номинального, двигатель перегревается и выходит из строя. При повышении напряжения, как следует из выражения U 1ф ≈ Е 1 = 4,44 f 1 w 1Ф k 01, в той же степени возрастает и магнитный поток. В результате, как видно из кривой намагничивания (рис. 4.64 а), значительно возрастают ток намагничивания I р и, следовательно, ток обмотки статора. При понижении напряжения магнитный поток уменьшается и, как видно из выражения М = C Ф I 2cos ψ2, возрастают выше номинального ток ротора I 2 и, следовательно, ток статора I 1, так как cos ψ2 изменяется незначительно. Кроме того, при понижении напряжения существенно уменьшаются пусковой и максимальный моменты двигателя, так как они пропорциональны квадрату напряжения. Работа двигателя допустима при колебании напряжения в сети не более ± 5% U ном. Влияние отклонения частоты сети от номинального значения на режим работы двигателя рассматривать не будем, так как ощутимых изменений частоты в мощных силовых системах промышленных районов не наблюдается. Мощность, потребляемая двигателем из сети, при номинальной и любой другой нагрузке может быть определена по формуле P 1 =P 2/η = Отношение М к/ М ном характеризует перегрузочную способность двигателя.
Трансформаторы.
Назначение, классификация, условное обозначение, основные параметры.
Трансформатор - представляет собой статический электромагнитное устройство с двумя (или больше) индуктивно связанных обмотками, предназначенный для преобразования (посредством электромагнитной индукции) переменного тока одного напряжения в переменный ток другого. Трансформаторы широко применяются при передаче электрической энергии на большие расстояния, распределении ее между приемниками, а также в различных выпрямительных, усилительных, сигнализационных и других устройствах.
|
|||||||||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 122; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.236.174 (0.102 с.) |
 .
. .
. ,
,  ,
,  . Поэтому фазные напряжения генератора и приёмника соответственно равны:
. Поэтому фазные напряжения генератора и приёмника соответственно равны:  ,
,  ,
,  .
. ;
;  ;
;  .
. зависит не только от характера и величины сопротивлений фаз, но и от схемы их включения. При перемене местами нагрузок двух фаз ток нейтрального провода может измениться в несколько раз.
зависит не только от характера и величины сопротивлений фаз, но и от схемы их включения. При перемене местами нагрузок двух фаз ток нейтрального провода может измениться в несколько раз. получают как геометрическую сумму векторов фазных токов.
получают как геометрическую сумму векторов фазных токов. . Достаточно вычислить только один ток:
. Достаточно вычислить только один ток: ;
;  .
. .
. ;
;  ;
;  .
. или
или  .
. или
или  .
. .
. ;
;  .
. и
и  , а при соединении треугольником
, а при соединении треугольником  и
и  . Поэтому независимо от схемы соединения фаз приемника можно получить одинаковые формулы мощностей, вычисленных через линейные напряжения и токи:
. Поэтому независимо от схемы соединения фаз приемника можно получить одинаковые формулы мощностей, вычисленных через линейные напряжения и токи: ;
;  ;
;  .
.
 ,
, , образованного этим вектором с осью абсцисс, можно записать
, образованного этим вектором с осью абсцисс, можно записать ,
, .
. , описывая окружность, что соответствует круговому вращающемуся полю.
, описывая окружность, что соответствует круговому вращающемуся полю. и
и  , характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону. Если ток в катушке В отстает от тока в катушке А на 900 (см. рис. 4.59 б), то
, характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону. Если ток в катушке В отстает от тока в катушке А на 900 (см. рис. 4.59 б), то  ;
;  .
. на оси x и y декартовой системы координат, связанной с осями катушек:
на оси x и y декартовой системы координат, связанной с осями катушек: ;
; .
. ; (181)
; (181) . (182)
. (182)
 ;
;  .
. ;
; .
. ,
, ,
, , величина которого определяется выражением
, величина которого определяется выражением ,
, - радиус расточки магнитопровода, а р – число пар полюсов (число эквивалентных вращающихся постоянных магнитов, создающих магнитное поле, - в представленном на рис. 4.61 случае р=1).
- радиус расточки магнитопровода, а р – число пар полюсов (число эквивалентных вращающихся постоянных магнитов, создающих магнитное поле, - в представленном на рис. 4.61 случае р=1).
 ,
, постоянна, если
постоянна, если  . Таким образом, если мысленно выбрать в воздушном зазоре некоторую точку и перемещать ее вдоль расточки магнитопровода со скоростью
. Таким образом, если мысленно выбрать в воздушном зазоре некоторую точку и перемещать ее вдоль расточки магнитопровода со скоростью ,
, .
. , принципиально меньшей частоты вращения поля
, принципиально меньшей частоты вращения поля  . Отсюда название двигателя - асинхронный.
. Отсюда название двигателя - асинхронный. называется относительным скольжением, где
называется относительным скольжением, где  вращающееся магнитное поле не будет пересекать токопроводящих стержней ротора и, следовательно, в них не будут наводиться токи, участвующие в создании вращающегося момента.
вращающееся магнитное поле не будет пересекать токопроводящих стержней ротора и, следовательно, в них не будут наводиться токи, участвующие в создании вращающегося момента. . В зависимости от значений скольжения s трехфазная асинхронная машина работает в режиме двигателя, генератора или электромагнитного тормоза.
. В зависимости от значений скольжения s трехфазная асинхронная машина работает в режиме двигателя, генератора или электромагнитного тормоза. ) трехфазная асинхронная машина преобразует электрическую энергию в механическую. Ротор двигателя вращается в направлении вращения магнитного поля с частотой, меньшей, чем частота вращения поля. При этом токи в обмотке ротора, взаимодействуя с вращающимся магнитным полем, создаваемым токами в обмотках статора, создают вращающий момент, уравновешивающий тормозной момент сил трения и механической нагрузки на валу.
) трехфазная асинхронная машина преобразует электрическую энергию в механическую. Ротор двигателя вращается в направлении вращения магнитного поля с частотой, меньшей, чем частота вращения поля. При этом токи в обмотке ротора, взаимодействуя с вращающимся магнитным полем, создаваемым токами в обмотках статора, создают вращающий момент, уравновешивающий тормозной момент сил трения и механической нагрузки на валу.
 ) трехфазная асинхронная машина преобразует механическую энергию в электрическую. Ротор генератора вращается в направлении вращения магнитного поля, создаваемого токами в обмотках статора, с частотой, большей, чем частота вращения поля.
) трехфазная асинхронная машина преобразует механическую энергию в электрическую. Ротор генератора вращается в направлении вращения магнитного поля, создаваемого токами в обмотках статора, с частотой, большей, чем частота вращения поля. ) ротор трехфазной асинхронной машины вращается в направлении, противоположном направлению вращения магнитного поля, создаваемого токами в обмотках статора. При этом в машине рассеивается значительная энергия в обмотках и магнитопроводе на гистерезис и вихревые токи.
) ротор трехфазной асинхронной машины вращается в направлении, противоположном направлению вращения магнитного поля, создаваемого токами в обмотках статора. При этом в машине рассеивается значительная энергия в обмотках и магнитопроводе на гистерезис и вихревые токи.
 - при соединении по схеме “треугольник”, линейное напряжение сети должно быть равно 220 В, при соединении по схеме “звезда” – 380 В
- при соединении по схеме “треугольник”, линейное напряжение сети должно быть равно 220 В, при соединении по схеме “звезда” – 380 В , где
, где  - частота тока в обмотках статора,
- частота тока в обмотках статора,  - число пар полюсов. Это объясняет название двигателя – синхронный.
- число пар полюсов. Это объясняет название двигателя – синхронный.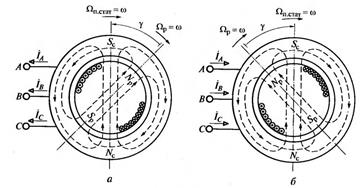
 относительно оси магнитных полюсов статора. в направлении вращения (см. рис. 4.63 а). При этом изменится сдвиг фаз между ЭДС, индуцируемых в обмотках фаз статора магнитным полем вращающегося ротора, и фазными напряжениями сети, к которой подключена машина. Последнее сопровождается изменением токов в фазах статора. Электромагнитное взаимодействие изменившихся токов в фазах статора с магнитным полем ротора создает тормозной момент, действующий на ротор. Это означает преобразование энергии механического движения первичного двигателя в электрическую энергию генератора. Магнитные полюсы ротора будут тянуть за собой магнитные полюсы статора.
относительно оси магнитных полюсов статора. в направлении вращения (см. рис. 4.63 а). При этом изменится сдвиг фаз между ЭДС, индуцируемых в обмотках фаз статора магнитным полем вращающегося ротора, и фазными напряжениями сети, к которой подключена машина. Последнее сопровождается изменением токов в фазах статора. Электромагнитное взаимодействие изменившихся токов в фазах статора с магнитным полем ротора создает тормозной момент, действующий на ротор. Это означает преобразование энергии механического движения первичного двигателя в электрическую энергию генератора. Магнитные полюсы ротора будут тянуть за собой магнитные полюсы статора. у которого обычно не превышает 0,8…0,85, у синхронного двигателя можно добиться большего значения
у которого обычно не превышает 0,8…0,85, у синхронного двигателя можно добиться большего значения 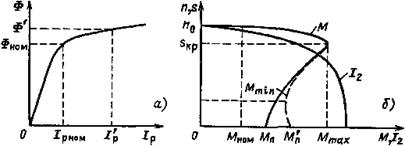
 UI cos φ.
UI cos φ.


