
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Измеряемые параметры движения. Виды радиолокации
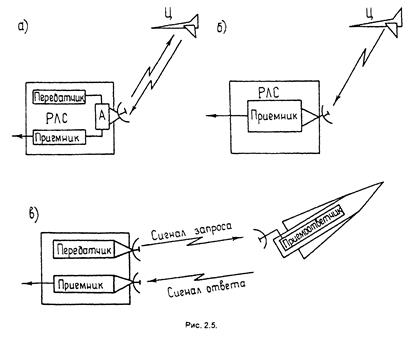
Радиолокационные визиры позволяют определять местоположение цели в пространстве и ее скорость. Измерение местоположения цели происходит в сферической системе координат Радиолокационные визиры определяют сферические координаты цели: Методы определения координат цели и ЛА в радиолокационных визирах основаны на реализации свойств объекта отражать и излучать радиоволны. Для измерения координат цели используются три вида радиолокации: активная с пассивным ответом, пассивная и активная с активным ответом (рис.2.5). Активной радиолокацией с пассивным ответом (рис. 2.5, а) называют такую, когда радиолокационным сигналом является отраженный (переизлученный) сигнал цели. При этом методе радиолокационный визир содержит передатчик, вырабатывающий зондирующие (прямые) сигналы, антенну, излучающую и улавливающую сигналы, приемник, осуществляющий усиление и преобразование радиолокационных сигналов. С выхода приемника сигналы подаются в устройство выделения информации. Полуактивный метод радиолокации - такой, при котором цель облучается радиосигналами, вырабатываемыми передатчиком, расположенным вне визира цели, а приемник радиолокационных сигналов находится в составе аппаратуры визира. Пассивная радиолокация (рис. 2.5, б) состоит в приеме и обработке собственных радиоизлучений цели. В этом случае визир имеет в своем составе антенну и приемник, осуществляющий прием, усиление и преобразование радиолокационных сигналов. Активная радиолокация с активным ответом (рис. 2.5, в) состоит в определении местоположения ЛА по сигналам ответа, ретранслированным приемоответчиком, установленным на ЛА. Сигналы приемоответчика по мощности значительно выше мощности сигналов, отраженных от ЛА.
Методы определения дальности Методы определения дальности основаны на измерении времени прохождения (запаздывания) сигналов от визира до цели и обратно. Метод основан на том, что радиоволны распространяются прямолинейно и с постоянной скоростью (С=3x108 м/c), тогда время запаздывания Известно несколько методов измерения дальности, отличающихся друг от друга видом используемого для определения времени запаздывания сигнала: импульсный, частотный, фазовый. Импульсный метод основан на измерении времени прохождения импульса от РЛС до цели и обратно. Сущность метода состоит в том, что в момент посылки импульса к цели на индикаторе появляется начальный импульс, и электронный луч трубки индикатора начинает перемещаться с постоянной скоростью Vэл. За время прохождения импульса до цели и обратно электронный луч трубки переместится по экрану на величину lРЦ, пропорциональную 2 rЦ (рис.2.6)
Прокалибровав развертку индикатора в единицах дальности, можно непосредственно отсчитывать дальность цели. Такой метод можно применять для грубой оценки. Более точное измерение дальности импульсным методом достигается с помощью автоматических следящих аналоговых или цифровых систем и составляет иногда несколько метров при дальностях цели в несколько десятков и сотен километров. Недостатком импульсного метода является трудность получения значительных мощностей излучаемых импульсов для обнаружения и сопровождения цели на больших дальностях и невозможности измерения скорости цели.
При линейном изменении частоты сигнала передатчика со скоростью
Но
Из последней формулы видно, что для определения дальности частотным методом необходимо измерять разность частот излучаемого и принимаемого сигналов, которая выделяется в смесителе. Величина Разрешающая способность по дальности частотного метода зависит от формы излучаемых сигналов и свойств частотомера и анализатора частоты. К достоинствам частотного метода относят возможность измерения малых расстояний (до долей метра) и использование маломощных передатчиков, работающих в режиме непрерывного излучения, а к недостаткам - необходимость иметь две антенны, высокие требования к линейности изменения частоты и заглубление чувствительности приемника просачивающимися сигналами передатчика. Фазовый метод измерения дальности состоит в измерении разности фаз прямого и отраженного от цели сигнала. Он находит ограниченное применение.
|
||||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 187; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.135.246.193 (0.005 с.) |
 Для наведения ЛА требуется измерять положение ЛА и цели относительно заданной системы координат. Выбор системы координат диктуется конструктивными соображениями, положенными в основу работы устройств измерения координат и параметров движения цели и ЛА.
Для наведения ЛА требуется измерять положение ЛА и цели относительно заданной системы координат. Выбор системы координат диктуется конструктивными соображениями, положенными в основу работы устройств измерения координат и параметров движения цели и ЛА. , начало которой совпадает с местом нахождения радиолокационной станции (РЛС) (рис.1.4).
, начало которой совпадает с местом нахождения радиолокационной станции (РЛС) (рис.1.4). В случае необходимости по этим измерениям можно определить высоту полета цели
В случае необходимости по этим измерениям можно определить высоту полета цели  и координаты местоположения в земной системе координат
и координаты местоположения в земной системе координат  .
. .
.

 Частотный метод измерения дальности основан на изменении величины частоты передатчика за время прохождения сигнала к цели и обратно. Для этого используется непрерывный сигнал, частота которого изменяется во времени по линейному пилообразному или синусоидальному закону. Дальномер, реализующий данный метод, имеет передатчик, приемник, две антенны, частотный модулятор, частотомер и индикатор дальности (рис.2.7). Частотно-модулированный сигнал излучается антенной АП и в некоторый момент времени достигает цели. После отражения от нее сигнал улавливается антенной АПР и подается в усилитель высокой частоты (УВЧ) и далее в смеситель, куда подается прямой сигнал передатчика.
Частотный метод измерения дальности основан на изменении величины частоты передатчика за время прохождения сигнала к цели и обратно. Для этого используется непрерывный сигнал, частота которого изменяется во времени по линейному пилообразному или синусоидальному закону. Дальномер, реализующий данный метод, имеет передатчик, приемник, две антенны, частотный модулятор, частотомер и индикатор дальности (рис.2.7). Частотно-модулированный сигнал излучается антенной АП и в некоторый момент времени достигает цели. После отражения от нее сигнал улавливается антенной АПР и подается в усилитель высокой частоты (УВЧ) и далее в смеситель, куда подается прямой сигнал передатчика. частота излучаемых передатчиком колебаний за время запаздывания
частота излучаемых передатчиком колебаний за время запаздывания  . Откуда следует, что
. Откуда следует, что
 тогда
тогда
 измеряется частотомером, проградуированным в единицах дальности. Индикация сигналов цели может быть осуществлена индикатором, куда поступает сигнал после частотомера.
измеряется частотомером, проградуированным в единицах дальности. Индикация сигналов цели может быть осуществлена индикатором, куда поступает сигнал после частотомера.


