Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Уравнения движения летательного аппарата
Движение осесимметричного ЛА с аэродинамическим управлением в пространстве, рассматриваемого как твердое тело, определяется следующей системой дифференциальных уравнений:
где V - скорость центра масс ЛА;
m - масса ЛА; R - сила тяги двигателя; mc - секундный массовый расход топлива; X,Y,Z - проекции аэродинамической силы на оси скоростной системы координат;
S - характерная площадь; l - характерная длина корпуса ЛА; q - скоростной напор; r - плотность воздуха;
При заданных функциях При наведении ЗУР тяга реактивного двигателя обычно не регулируется, а рули поворачиваются в зависимости от сигналов управления, которые поступают на входы рулевых приводов от системы управления угловым положением ракеты. При исследовании наведения в вертикальной плоскости движение ЛА определяется следующей системой уравнений:
Движение ЛА с аэродинамическим управлением при наведении в горизонтальной плоскости без крена определяется следующими дифференциальными уравнениями:
При малом отклонении траектории движения ЛА от кинематической траектории, определяемой методом наведения, часто для анализа возмущенного движения используют линейную модель системы наведения. Линейная модель используется также на начальных этапах исследования реальной системы наведения, динамика которой определяется нелинейными уравнениями. Для получения линейной системы дифференциальных уравнений, определяющих возмущенное движение ЛА, используется метод линеаризации [15]. В результате линеаризации получаем линейную систему дифференциальных уравнений с переменными коэффициентами.
За время переходного процесса в системе управления угловым движением ЛА коэффициенты линейной системы изменяются не более чем на 20-30 %, что позволяет, используя метод ”замораживания “ коэффициентов ограничиться при исследовании углового движения ЛА линейной системой дифференциальных уравнений с постоянными коэффициентами. При исследовании углового движения ЛА в вертикальной плоскости обычно ограничиваются анализом только первого этапа возмущенного движения, когда изменение скорости ЛА не учитывается. Это обусловлено тем, что за время переходного процесса скорость ЛА не успевает существенно измениться. Первый этап продольного возмущенного движения осесимметричного ЛА определяется следующей линейной системой уравнений с постоянными коэффициентами:
где Система уравнений (2.4) справедлива для маневренного ЛА (опущено слагаемое Динамические коэффициенты вычисляются по формулам:
При исследовании динамики осесимметричного ЛА возмущенное движение вокруг продольной оси в первом приближении обычно рассматривается независимо от возмущенного движения вокруг оси oy1. Возмущенное движение вокруг продольной оси называется движением крена и определяется следующими линейными дифференциальными уравнениями:
где Возмущенное движение ЛА вокруг вертикальной оси называется движением рыскания и определяетсяуравнениями:
где
При анализе структурных схем часто используются передаточные функции. При исследовании контура управления угловым движением ЛА в вертикальной плоскости используются следующие передаточные функции, соответствующие системе уравнений (2.4):
где
Системе уравнений (2.6) соответствуют передаточные функции:
где Используя систему уравнений (2.7) получим передаточные функции для движения ЛА в горизонтальной плоскости:
где
В процессе движения ЛА по траектории динамические коэффициенты могут сильно изменяться. Так, например, в таблице 2.1 показано изменение коэффициентов передаточных функций (2.8) для ЗУР “Пэтриот” в процессе движения на пассивном участке траектории. Расчеты выполнены на основе данных, приведенных в [18]. Данные таблицы показывают, что линейную модель с постоянными коэффициентами можно использовать при анализе переходных процессов на малом интервале времени, когда динамические коэффициенты изменяются не более чем на 15-25%.
Таблица 2.1
Система стабилизации Управление угловым положением ЛА происходит за счет вращения относительно трех его осей 0 x1, 0 y1 и 0 z1, проходящих через центр масс. Система стабилизации предназначена для сохранения требуемого углового положения ЛА или установившегося углового движения. Для управления вокруг продольной оси ОХ используется система стабилизации крена, для управления вокруг оси ОZ- система стабилизации тангажа и система стабилизации рыскания применяется для управления вокруг оси ОУ. Управление ЗУР обычно происходит в декартовой системе координат. В этом случае основной задачей системы стабилизации крена является сохранение угла крена неизменным и равным нулю. Тогда система стабилизации тангажа осуществляет управление угловым положением ЛА в вертикальной плоскости, а система стабилизации рыскания - в боковой плоскости. Для поворота без крена ЗУР обычно имеют крестообразную аэродинамическую схему. Это существенно повышает быстродействие ЛА [29]. Системы стабилизации ЗУР одновременно выполняют функции управления нормальными перегрузками. У большинства ЗУР наблюдается слабое затухание возмущенного движения из-за небольших размеров оперения, поэтому у них достаточно трудно обеспечить управление нормальными перегрузками. Процесс управления нормальными перегрузками существенно ухудшается из-за непостоянства динамических характеристик ракеты от высоты и скорости полета, поэтому одной из задач системы стабилизации следует считать необходимость исправления динамических характеристик ракеты. Система стабилизации должна обеспечивать высокое быстродействие ЛА, но при этом должна уменьшать влияние внешних возмущений и внутренних шумов аппаратуры. К числу дополнительных требований, предъявляемых к системам стабилизации ЛА данного класса, следует отнести уменьшение дестабилизирующего действия обтекателя координатора цели, снижение взаимного влияния между каналами управления и крена. Для осесимметричных ЛА при нулевом угле крена управления движениями тангажа и рыскания можно рассматривать как независимые друг от друга и выполнять их идентичными.
Рассмотрим системы стабилизации каналов крена, тангажа и рыскания для осесимметричных ЛА с аэродинамическим управлением и крестообразным расположением крыльев. Стабилизация движения крена Основной задачей системы стабилизации крена при телеуправлении и самонаведении осесимметричных ЛА является сохранение угла крена неизменным и равным нулю. Для ослабления влияния перекрестных связей между каналами крена, тангажа и рыскания контур стабилизации крена должен обладать максимальным быстродействием и иметь минимальную величину перерегулирования.
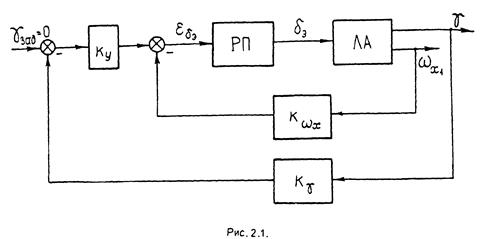
В наибольшей степени этим требованиям удовлетворяет контур стабилизации угла крена со свободным и дифференцирующим гироскопами (рис.2.1). На этой схеме: kwx -коэффициент усиления дифференцирующего гироскопа, измеряющего угловую скорость крена; k g - коэффициент усиления свободного гироскопа, измеряющего угол крена; РП - рулевой привод. Введение двух обратных связей позволяет повысить коэффициент усиления системы, увеличить запасы устойчивости и уменьшить время переходного процесса системы стабилизации угла крена. Если инерционность рулевого привода учитывать с помощью апериодического звена первого порядка с передаточной функцией
то уравнения, учитывающие динамику системы стабилизации угла крена на основе схемы, приведенной на рис.2.1, можно записать в виде:
Однако сформированная система стабилизации угла крена является статической и ей присущи все недостатки подобного рода систем.
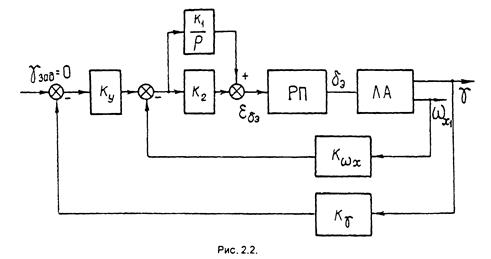
В тех случаях, когда требуется повысить точность стабилизации угла крена путем устранения установившейся ошибки по углу g, применяются астатические системы стабилизации. Система стабилизации в этом случае формируется за счет применения операционных усилителей (рис.2.2) или дополнительного включения в обратную связь интегрирующего гироскопа. Но данные системы являются более сложными и менее надежными.
|
|||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 625; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.222.148.124 (0.02 с.) |
 - угол наклона траектории;
- угол наклона траектории; - угол поворота траектории;
- угол поворота траектории; - проекции вектора угловой скорости ЛА на связанные оси;
- проекции вектора угловой скорости ЛА на связанные оси;  - угол тангажа;
- угол тангажа; - угол рыскания;
- угол рыскания; - угол крена;
- угол крена; - координаты центра масс ЛА в земной системе координат;
- координаты центра масс ЛА в земной системе координат; - угол скольжения;
- угол скольжения; - угол атаки;
- угол атаки; - скоростной угол крена;
- скоростной угол крена; - безразмерные коэффициенты аэродинамических сил;
- безразмерные коэффициенты аэродинамических сил; - безразмерные коэффициенты аэродинамических моментов;
- безразмерные коэффициенты аэродинамических моментов;

 - безразмерные значения проекций вектора угловой скорости ЛА;
- безразмерные значения проекций вектора угловой скорости ЛА; - углы отклонения рулей высоты, направления и элеронов;
- углы отклонения рулей высоты, направления и элеронов; - проекции момента от реактивной силы.
- проекции момента от реактивной силы. и заданных начальных условиях система уравнений (2.1) определяет единственную траекторию движения ЛА.
и заданных начальных условиях система уравнений (2.1) определяет единственную траекторию движения ЛА. (2. 2)
(2. 2) (2.3)
(2.3) (2. 4)
(2. 4) - отклонения параметров реального движения
- отклонения параметров реального движения  от их значений в невозмущенном движении
от их значений в невозмущенном движении 
 , учитывающее влияние силы веса), который имеет небольшие рулевые поверхности, подъемной силой которых можно пренебречь (в третьем уравнении опущено слагаемое
, учитывающее влияние силы веса), который имеет небольшие рулевые поверхности, подъемной силой которых можно пренебречь (в третьем уравнении опущено слагаемое  , учитывающее подъемную силу рулей).
, учитывающее подъемную силу рулей). (2.5)
(2.5) (2.6)
(2.6)
 (2. 7)
(2. 7)
 (2.8)
(2.8) - коэффициент усиления ЛА;
- коэффициент усиления ЛА; - постоянная времени ЛА;
- постоянная времени ЛА; - постоянная времени ЛА по скорости;
- постоянная времени ЛА по скорости; - коэффициент демпфирования.
- коэффициент демпфирования. (2.9)
(2.9)
 (2.10)
(2.10)
 (2.11)
(2.11)