Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Моделювання роботи САР температури у рудотермічній печі
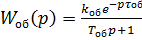
Регулятор обирається по відомим характеристикам об’єкту регулювання та збурення. З прийнятною для практичних цілей точністю рудотермічну піч можна апроксимувати статичним об’єктом із запізненням.
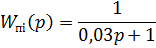
Головною умовою при виборі регулятору і розрахунку його налаштувань є якість регулювання, котра забезпечує точність підтримання режиму і його економічну ефективність. Вибір регулятору заключається в виборі закону регулювання і його параметрів. Для регулювання температури у РТП обираємо ПІ-регулятор із аперіодичним процесом регулювання. Передаточною функцією ПІ-регулятора є:
Для подальшого розрахунку визначимо параметри об’єкту регулювання. Tоб=3/60=0,05 хв Також визначимо значення чистого запізнення τоб: τоб=0,05·3=0,015 хв Підставимо розраховані значення в передаточну функцію об’єкту регулювання.
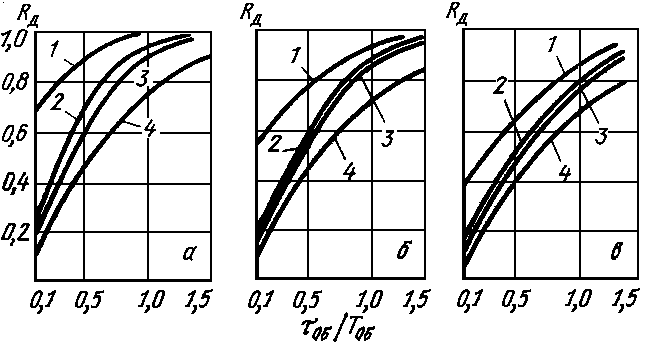
Розрахуємо величину відносного запізнення: τоб/Tоб=0,015/0,05=0,3 Обираємо за графіками на рисунку 2.12 значення динамічного коефіцієнту регулювання Rд=0,45.
Рисунок 2.12 - Динамічні коефіцієнти для різних типів регуляторів 1 – И-регулятор, 2 – П-регулятор, 3 – ПИ-регулятор, 4 – ПИД-регулятор, що реалізують оптимальні перехідні процеси: 1) аперіодичний, 2) з 20%‑вим перерегулюванням, 3) з min òx2dt. Визначимо коефіцієнти регулятора:
Підставимо розраховані значення в передаточну функцію ПІ-регулятора:
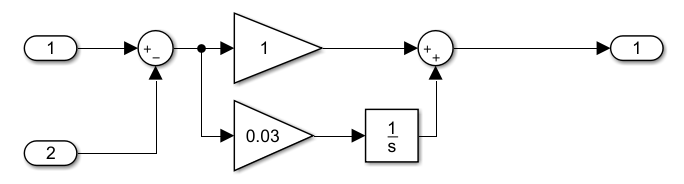
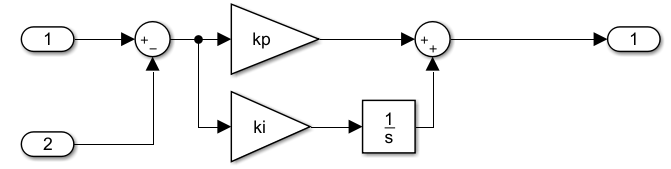
Виконаємо модель системи в пакеті Matlab Simulink, модель наведена на рисунку 2.9. Підставимо розраховані значення коефіцієнтів передаточних функцій об’єкту і регулятора та запустимо симуляцію технологічного процесу. Отриманий графік регулювання тиску наведено на рисунку 2.10.
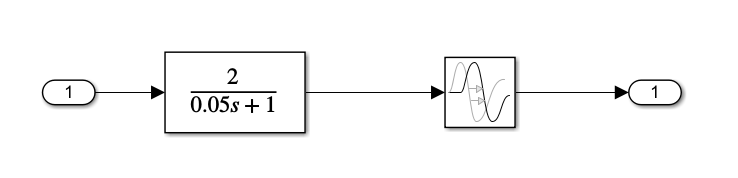
Рисунок 2.10 - Графік регулювання температури у РТП
За отриманим графіком регулятор має занадто високий коефіцієнт підсилення, через що в перший момент часу отримано стрибкоподібне значення регулювання тиску, регулятор досягає усталеного рівня тиску за 200 секунд, що не відповідає заданим параметрам технологічного процесу. В Matlab є вбудовані інструменти для оптимізації параметрів регулятору по заданій формі перехідного процесу. Для вирішення завдань оптимізації параметрів регулятора добавимо в модель блок «Check Step Response Characteristic». Перед початком виконання оптимізації замість числових коефіцієнтів регулятору підставимо kp та ki. Об’явимо ці змінні в Matlab за допомогою команд kp=1 та ki=0.03. Після налаштування блоку «Check Step Response Characteristic» отримаємо графік оптимізованого процесу із наступними коефіцієнтами ПІ-регулятору, що наведені на рисунку 2.11.
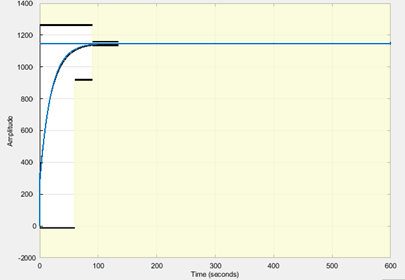
Рисунок 2.11 – Графік оптимізації параметрів регулятору
В результаті оптимізації були отримані наступні коефіцієнти ПІ-регулятору: Kp=0,156 Ki=0,0343 В результаті оптимізації коефіцієнтів ПІ-регулятора отримано наступний графік регулювання тиску, що наведений на рисунку 2.12.
Рисунок 2.12 - Графік регулювання температури у РТП із збуренням Висновки основної частини
1) Скомпоновано УОК в якості системи регулювання температури у електричній рудотермічній печі та підібрані датчики та виконавчі механізми даної системи. 2) Обрано тип регулятору, розраховані та оптимізовані параметри регулятора тиску.
ОХОРОНА ПРАЦІ
У даному дипломному проекті розглядається питання розробки автоматизованої системи регулювання температури у електричній рудотермічній печі. У системі використовується мікропроцесорна техніка - багато-функціональні мікропроцесорні комплекси (УОК), ПЕВМ, а також датчики і вторинні прилади. У зв'язку з цим в даному розділі будуть розглянуті питання охорони праці відносно ділянки АСУТП, а саме - захист від поразки електричним струмом при роботі в приміщенні мікропроцесорної техніки, аналіз шкідливих і небезпечних виробничих чинників ділянки і відповідно до цього заходи щодо їх усунення, питання пожежної безпеки. Всі ці питання продиктовані законом України «Про охорону праці», у якому говориться, що: “Проектування виробничих об'єктів, розробка нових технологій, знарядь виробництва, засобів колективного і індивідуального захисту, повинні проводитися з врахуванням вимог про охорону праці.”
|
||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 89; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.146.255.127 (0.005 с.) |
 (2.1)
(2.1)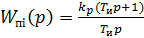 (2.2)
(2.2)
 (2.3)
(2.3)
 (2.4)
(2.4)