Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Сущность методов оптимизации
В ТЕХНОЛОГИИ, ОРГАНИЗАЦИИ И УПРАВЛЕНИИ АВТОМОБИЛЬНЫМИ ПЕРЕВОЗКАМИ Повышение эффективности автомобильных перевозок грузов связано с применением методов классической и современной математики для решения прикладных задач. По своему характеру все решаемые на транспорте задачи можно разделить на три группы: разработка технологических процессов перевозки грузов; оперативное управление перевозочным процессом; учет и статистика. Разработка технологических процессов перевозки грузов связана с определением кратчайших расстояний между пунктами транспортной сети, с составлением рациональных маршрутов при перевозке массовых грузов, с определением развозочно-сборных маршрутов при мелкопартионных перевозках с рациональной эксплуатацией различных моделей автомобилей на перевозке различных грузов, с закреплением автотранспортных предприятий за грузоотправителями и другими вопросами. Человеческий ум обладает огромными достоинствами по сравнению с любой машиной. Благодаря интуиции была решена «проблема коммивояжера». Эта известная математическая проблема, долго ставившая в тупик математиков, в одном из вариантов формулировалась так: коммивояжер, выезжая из Вашингтона, должен посетить 48 главных городов штатов и вернуться в Вашингтон по кратчайшему пути. Число возможных маршрутов составляет 1062. Сотрудники института РЭНД (США) с помощью булавок и ниток и своей интуиции открыли кратчайший маршрут, способствовали возникновению и развитию методов динамического программирования. Каждый анализ пронизан интуицией и рассуждением. Недостатком интуиции является то, что без аналитической проверки неизвестно, насколько она справедлива. Интуиция использует в нашем сознании модели упрощенных понятийных копий действительности. В большинстве случаев при рассмотрении сложных задач полезно подкрепить наш мозг некоторой помощью извне, используя карандаш, лист бумаги, несколько уравнений, настольную вычислительную машину и в особых случаях сложную статистическую и математическую теорию или быстродействующие машины. Аналитические методы и вычислительные машины позволяют нам сделать то, что сделать другим путем невозможно. Необходимо только обращать внимание на то, чтобы математические методы не способствовали узковедомственному подходу к решению вопросов, проникновению чуждой идеологии, подмене социально-экономического анализа математическим методом исследования, в результате чего здравый смысл исчезает, а остаются одни уравнения.
Рассмотрим несколько примеров применения математических методов при разработке технологических проектов перевозки грузов. Задача 8.1. Однородный груз в количестве 400 т находится на двух складах. На складе № 1 находится 250 т груза и на складе № 2 - 150 т. Груз необходимо перевезти двум потребителям. Потребителю А требуется 250 т и потребителю В - 150 т (рис. 8.1). В такой ситуации возникает желание отправить груз со склада № 1 потребителю А, а со склада №2 - потребителю В. Из рис. 8.1, видно, что такое решение приведет к выполнению транспортной работы в объеме
Если потребителю В отправить груз из ближайшего склада № 1, а потребителю А перевезти оставшиеся 100 т, а остальные 150 т со склада № 2, то транспортная работа составит 150-5 + 100-15 + 150-5 = 3000 ткм. В случае, когда потребителю В направить со склада № 1 - 50 т и со склада Лг 2 - 100 т, а оставшиеся грузы направить потребителю А, транспортная работа составит 50-5+ 100 10 + 50-5+ 200-15 = 4500 т-км. Таких вариантов можно составить очень много. Будет ли второй вариант лучшим? Для того чтобы ответить на этот вопрос, необходимо либо пересчитать все варианты, либо применить математические методы. Обозначим количества груза, направляемого со склада № 1 потребителю В, через X. Тогда потребителю А с этого склада будет перевезено 250 - X. Потребителю В этом случае со склада № 2 будет перевезено 150 - X, а потребителю А - остальной груз в количестве X. Придавая X различные значения от 0 до 150, мы получим различные варианты решений. Математическая модель для решения этой задачи будет иметь вид:
или
Из формулы (8.1.) видно, что лучший вариант решения будет в том случае, когда Сбудет иметь наибольшее значение, т. е. 150. Задача 8.2. Определить необходимое число автомобилей для работы в комплексе с экскаватором, обеспечивающих минимальные затраты, связанные с перемещением материала.
Чем больше автомобилей будет участвовать в перевозке, тем будет ниже производительность каждого автомобиля из-за увеличения времени простоя под погрузкой, в связи с простоями в очереди при ожидании погрузки, и выше себестоимость транспортирования. С другой стороны, с увеличением числа работающих автомобилей улучшается использование экскаватора и снижается себестоимость погрузки фунта. Математическая формулировка задачи будет иметь вид:
где: Сэ - стоимость машино-часа экскаватора, руб./ч; Са - стоимость автомобиле-часа, руб./ч; λ - интенсивность входящего потока автомобилей; Аэ - число автомобилей, работающих с экскаватором; μ0 - интенсивность обслуживания; ρ - приведенная плотность потока автомобилей; D{t0) - дисперсия времени обслуживания, ч. Аналитическими методами расчетов могут решаться задачи по взаимодействию подвижного состава и погрузочно-разгрузочных механизмов, по определению рациональной грузоподъемности подвижного состава автомобильного транспорта, по определению рациональной партионности перевозимого груза и др. Однако этими методами можно решать задачи, когда известны оптимизирующие функции и имеется незначительное число оптимизирующих переменных. При большом числе переменных применение аналитических методов становится затруднительным. Аналитический поиск экстремума целевой непрерывной функции
где: (x1, х2,..., хп) - независимые переменные, сводится к решению системы из уравнений, полученной приравниванием частных производных к нулю
Для решения сложных задач, связанных с перевозкой грузов, когда непосредственное сравнение вариантов с целью выбора оптимального оказывается трудновыполнимым, применяется линейное программирование. Решение задач методами линейного программирования связано с разработкой математической модели. Понятие модель в настоящее время одно из самых популярных. А. И. Ракитов дает следующее определение модели. Объект А будем называть моделью объекта 5, если А является объектом - заместителем по отношению к В и если А в некотором отношении проще, удобнее, компактнее или обладает иными преимуществами по отношению к В и, кроме того, существует такая зависимость между А и В, что, манипулируя А, мы получаем знания, которые могут быть непосредственно или с некоторыми поправками отнесены к В. Физическая модель с давних пор используется для эксперимента, для проверки разнообразных идей. Экономические явления столь сложны, столь многофакторны, что их практическая проверка бывает трудно осуществима. И здесь используются экономико-математические модели. Модель может состоять лишь из списка рекомендаций, а может содержать и абстрактные математические построения. В любом случае модель следует рассматривать как определенную формализацию проблемы, что облегчает получение решения. Методы линейного программирования позволяют найти решение не путем перебора и сравнения всех возможных вариантов, а путем применения определенного математического расчета, который рядом последовательных приближений приводит к оптимальному решению. Слово «программирование» показывает, что эти методы применяются для проектирования (планирования), а слово «линейное» определяет математическую природу этих методов, которая заключается в том, что задачи решаются на основе системы линейных уравнений, т. е. уравнений, содержащих неизвестные в первой степени. Система из двух уравнений с двумя неизвестными
имеет единственное решение X1 = 1, Х2 = 2. Уравнение Х1+2Х2=10 (8.6) имеет бесчисленное множество решений:
Если переменные будут принимать только не отрицательные значения, т. е. Х1≥ 0 и Х2 ≥ 0, то
Наложение дополнительного ограничения на переменные уравнения (8.6) хотя и не привело к единственности решения этого уравнения, но значительно сузило область их определения. Таким образом, условие неотрицательности переменных является обязательным требованием в задачах линейного программирования. Второе условие нахождения решений неопределенных систем линейных уравнений состоит в приведении их к системам, содержащим уже столько неизвестных, сколько и уравнений, т. е. к определенным системам. Это достигается приравниванием соответствующего числа переменных к нулю. Например, неопределенная система
имеет три следующих решения:
Если уравнения (8.8) описывают условия задачи линейного программирования, то необходимо рассматривать только два первых неотрицательных решения. Общая задача программирования связана с некоторыми целевыми установками, т. е. отысканием либо максимума, либо минимума целевой функции. Если в качестве целевой функции (модели) будет выражение X1 + X2 + X3, (8.10) то когда требуется обеспечить ее максимальное значение, из двух решений оптимальным будет Х1 =21/5, Х2 =0, Х3 =8/5. Когда необходимо обеспечить минимальное значения целевой функции (8.10), то оптимальным будет вариант X1 = 0, Х2 = 3, Х3 =1. Преимущество линейного программирования перед другими методами заключается не только в том, что оно дает самый короткий из возможных путей нахождения лучшего варианта решения из всех возможных, но и в том, что его практическое применение основано на четырех действиях арифметики. Это позволяет легко осуществить механизацию расчетов, применяя при решении относительно несложных задач простые счетные приборы, а при сложных задачах ЭВМ. В настоящее время известно несколько различных методов линейного программирования. Наиболее широкое применение при разработке технологических проектов перевозки грузов находят графоаналитический метод, метод потенциалов, методы с разрешающими элементами и симплексный метод.
ГРАФОАНАЛИТИЧЕСКИЙ МЕТОД
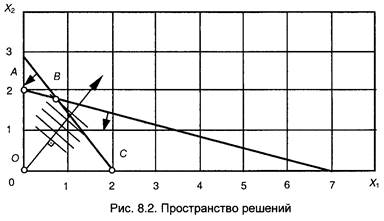
Чтобы понять основные свойства линейных моделей и из чего складывается процесс получения решения задач линейного программирования, рассмотрим геометрическую интерпретацию линейного программирования, получившего название графоаналитического метода. Необходимо учитывать, что графоаналитический метод может быть использован только в том случае, если задача содержит два, максимум три неизвестных. В последнем случае приходится пользоваться пространственной моделью. Несмотря на простоту решения задач этим методом, его применение при разработке технологических процессов весьма ограничено. Сущность графоаналитического метода рассмотрим на решении следующей задачи: максимизировать функцию 10Х1+13Х2 (8.11) при наличии ограничений
Решение задачи может быть найдено графически, как показано на рис. 8.2. Ограничения (8.12) и (8.13) на рис. 8.2 изображены прямыми линиями как уравнения, полученные заменой неравенств на равенства. Площадь под каждой из двух прямых эквивалентна математической формулировке, имеющей направленный смысл «меньше, чем» (<). Так как X1 и X2 не могут принимать отрицательных значений, область допустимых значений переменных ограничивается осями координат. Таким образом, многоугольник ОABC содержит в себе область значений Хх и Х2, удовлетворяющих всем имеющимся ограничениям. Множество точек, принадлежащих области, ограниченной линиями ОАВС (вместе с граничными точками), называется множеством решений. Это множество является выпуклым, т. е. любой отрезок, соединяющий две произвольным образом выбранные точки данного множества, лежит внутри или проходит вдоль границы ОABC.
Изменяя степень достижения цели Z0, получаем на рис. 8.2 семейство параллельных изолированных прямых, уравнение которых
Из уравнения (8.16) следует, что чем выше степень достижения цели, тем выше располагается соответствующая изоцелевая прямая. Оптимальное решение определяется экстремальной точкой В, для которой
Если в формуле для целевой функции (8.11) изменить коэффициенты при переменных (при этом угол наклона параллельных линий по отношению к оси абсцисс также будет другим), то в результате точка, задающая оптимальное решение, может перемещаться. Если при наличии ограничений (8.12), (8.13), (8.14) целевая функция будет иметь вид
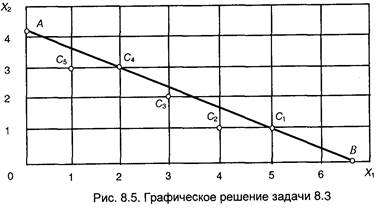
то в этом случае все точки, лежащие на отрезке АВ, будут являться оптимальными (рис. 8.3). Решение X1 = 0,95, Х2=1,8 будет оптимальным. Однако оптимальным будет и решение X1 = 0, Х2 = 2. Оптимальное значение целевой функции будет равно 28,0.
Проведенный анализ показывает, что решение задачи дается координатами вершин выпуклой области допустимых решений. Если решение задается координатами двух вершин, то оно дается координатами всего отрезка, соединяющего эти вершины.
при наличии ограничений:
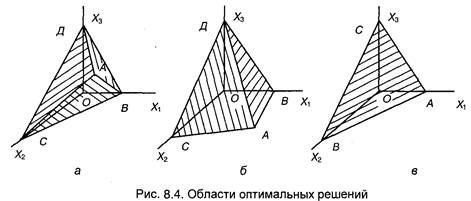
то приходится пользоваться пространственной моделью. Когда ограничения являются уравнениями, то каждое из них можно считать уравнением плоскости, лежащей в трехмерном пространстве, и точка, общая этим трем плоскостям, есть единственная точка, представляющая собой допустимое решение (рис. 8.4, а). Если ограничения являются неравенствами, то область оптимальных решений образуют точки некоторого выпуклого многогранника, расположенного в первом октанте. Придавая переменной Z0, формула (8.18), различные значения, получим семейство параллельных изоцелевых плоскостей (см. рис. 8.4, а), причем большим значениям Z0 будут соответствовать плоскости, расположенные дальше от начала координат. Решение задачи дается координатами одной из вершин выпуклого многогранника допустимых решений.
Если вместо трех уравнений ограничений имеется лишь два, допустим, уравнения (8.19) и (8.20), то в этом случае областью допустимых решений окажется линия пересечения плоскостей, являющихся изображениями уравнений ограничений (рис. 8.4, б). При одном уравнении ограничений областью допустимых решений будет являться треугольник, образованный линиями пересечения плоскости, изображающей это уравнение, с плоскостями координат (рис. 8.4, в). В случае, когда необходимо получить не максимум, а минимум функции, то многоугольник будет вогнутым. Особенности решения задач графоаналитическим методом рассмотрим на следующих примерах Задача 8.3. От поставщика А груз перевозится автомобилями КаMA3-5320 двум потребителям B1 и В2 на расстояние 15 и 25 км соответственно. При перевозке груза потребителю B1 на одну ездку затрачивается 1,23 ч, а потребителю В2 - 1,8 ч. Продолжительность работы автомобилей на линии -8 ч. Работая на маршруте В1, водитель делает 6 ездок, затрачивая на это 7,38 ч рабочего времени. На маршруте В2 водитель делает 4 ездки и затрачивает 7,2 ч рабочего времени. Требуется организовать работу так, чтобы максимально использовать рабочее время водителей. Математическая модель запишется в следующем виде: максимизировать
при наличии ограничения
где: X1 - число ездок на маршруте В1; Х2 - число ездок на маршруте В2.
будут оптимальными. Точки Q, С2 и так далее, заключенные между прямой АВ и осями координат, имеющие координатами целые числа, изображают все возможные варианты работы автомобиля. Точки, которые ближе расположены к прямой или лежат на ней, дают наилучшие - оптимальные решения. В рассматриваемом примере точки C1 с координатами X1=5 и Х2 = 1 и С4 с координатами X1 = 2, Х2 =3 ближе всех расположены к линии АВ. В первом случае продолжительность работы водителя на линии составит 1,23-5 + 1,8*1 = 7,95 ч, а во втором 1,23-2 + 1,8*3 = 7,86 ч. Задача 8.4. Определить потребное число поддонов для перевозки грузов пакетами, упакованными в потребительскую тару двух размеров - А и В. Количество грузов в таре типа А составляет 600 единиц и типа В - 300 единиц. Количество тары, загружаемой на поддон различными способами, приведено в табл. 8.1. Таблица 8.1
Математическая модель задачи будет сформулирована следующим образом: минимизировать Х{ + Х2 + Х3 + Х4 = Z0, (8.24) при наличии ограничений
где: Xi - число поддонов, загруженных по i-способу размещения тары. Для решения задачи начертим прямоугольную систему координат АОВ (рис. 8.6) и каждому возможному способу размещения тары на поддоне поставим точку, координаты которой соответствуют числу соответствующей тары, размещаемой на поддоне. Буквой С с индексом обозначим номер способа размещения тары на поддоне. Множество всевозможных планов размещения тары на поддоне изображается совокупностью точек выпуклого многоугольника С1 С2 С4 С3. Например, точки на отрезке С1 С2 будут указывать
Обозначим через δ долю поддонов, загружаемых по способу C1, а остальную часть (l-δ) - по способу С3, долю одного и другого способа размещения поддонов найдем из условия комплектности
Минимальное число поддонов Z0 определится из уравнения
откуда Z0 =212. Таким образом, по способу C1 будет загружено 194 поддона и по способу С3 - 18.
МЕТОД ПОТЕНЦИАЛОВ
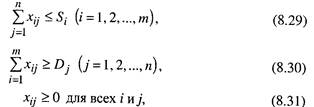
Метод потенциалов линейного программирования применяется при решении задач, связанных с распределением на транспортной сети грузопотоков: закрепление потребителей грузов за поставщиками, распределение парка подвижного состава по автотранспортным предприятиям, закрепление маршрутов работы подвижного состава за автотранспортными предприятиями и другие задачи. Задача закрепления потребителей за поставщиками получила название классической транспортной задачи. Решение такой задачи сводится к выбору транспортных маршрутов, по которым продукция различных предприятий перевозится на несколько конечных пунктов назначения. Математическая модель классической транспортной задачи в общем виде записывается в следующей форме: минимизировать
при ограничениях
где: m - число поставщиков; n - число потребителей; Xij - объем перевозок между i и j пунктами; Si- - ограничения по предложению; Di - ограничения по спросу; aij - расстояние от пункта i до пункта j. Условия задачи можно представить следующим образом. Каждый поставщик должен дать потребителям столько продукции, сколько у него есть, т. е.
Каждый потребитель должен получить столько, сколько ему требуется, т. е.
Необходимо найти такой вариант плана перевозок, чтобы транспортная работа была минимальна, т.е.
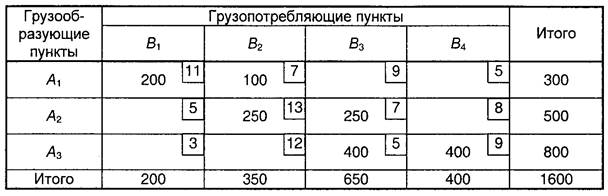
Запись и решение транспортной задачи методом потенциалов выполняется в таблично-матричной форме. Совокупность всех элементов матрицы хij называется планом перевозок или распределением поставок. Элементы матрицы называются показателями критерия оптимальности. В каждой конкретной транспортной задаче можно найти бесчисленное множество вариантов плана перевозок. План перевозок считается допустимым, если все возможности поставщиков используются, а спрос всех потребителей удовлетворяется. Такая модель транспортной задачи называется закрытой в силу сбалансированности спроса и предложения. Транспортная задача, в которой спрос не равен предложению, называется открытой моделью. Если допустимый план удовлетворяет условию (8.34), то он является оптимальным. В условии (8.34) сформулирована цель задачи или ее целевая функция. При решении транспортной задачи в качестве целевой функции могут приниматься следующие показатели: минимум тонно-километрового пробега, минимум провозных плат, минимум эксплуатационных расходов, минимум тонно-часов транспортирования и др. Критерий «минимум тонно-километрового пробега» (показатель критерия - расстояние) наиболее прост для применения и определения. К его недостаткам следует отнести то, что при одинаковом расстоянии транспортирования могут быть различные затраты (движение подвижного состава по различным дорожным покрытиям, перевозки по дорогам с различной интенсивностью движения и т. д.). Критерий «минимум провозных плат» (показатель критерия - тарифы) применяется для получения схемы грузопотоков, обеспечивающей минимальные затраты грузоотправителей. К недостаткам этого критерия следует отнести то, что тарифы не обладают свойством аддитивности, т. е. суммы тарифных плат от пункта А до пункта Б и от пункта Б до пункта В не идентичны тарифу от пункта А до пункта В. Это не дает возможности использовать тарифы в качестве критерия оптимальности при сетевой постановке задачи, а также при использовании машинных методов составления матриц. Критерий «минимум эксплуатационных расходов на транспортирование грузов» (показатель критерия - себестоимость транспортирования) отражает затраты автотранспортного предприятия, осуществляющего выполнение перевозок. Этот критерий может также использоваться при распределении перевозок между различными видами транспорта. Его недостатками являются: себестоимость транспортирования рассчитывается на обезличенный груз и не учитывает затрат, возникающих при перевозке отдельных видов специальных грузов; не учитывает изменение затрат на погрузочно-разгрузочные работы при использовании различных видов подвижного состава; сложность расчета себестоимости транспортирования по отдельным участкам дорожной сети. Критерий «минимум тонно-часов транспортирования груза» (показатель критерия - время транспортирования) может применяться при перевозке скоропортящихся грузов, овощей, живности и другой продукции. К его недостаткам относится то, что он не учитывает затрат, связанных с транспортированием груза. Линейные уравнения, описывающие условия транспортной задачи, отражают пропорциональные зависимости. Наличие линейных зависимостей - обязательное условие применения методов линейного программирования. Однако для транспортной задачи это требование условно. Например, затраты на транспортирование грузов не прямопропорциональны расстояниям транспортирования, однако они используются в качестве показателей целевой функции. Чтобы задача имела допустимое решение, требуется, чтобы общие ресурсы поставщиков были не меньше общего спроса потребителей Si ≥ Dj, а также естественным представляется и требование неотрицательности объема поставок и спроса, т. е. Si ≥ 0, Dj≥ 0. Рассмотрим применение метода потенциалов на следующем примере: Задача 8.5. Из трех грузообразующих пунктов A1, А2, А3 необходимо перевезти однородный груз четырем потребителям Bl, В2, B3, B4. Количество груза в пункте А1 = 300 т, в пункте А2 = 500 т, A3 = 800 т. Спрос потребителей на данный груз составляет: В1 = 200 т, В2 = 350 т, B3 = 650 т, В4 = 400 т. Расстояния между грузоотправителями и грузополучателями приведены в табл. 8.2. Необходимо так закрепить потребителей груза за грузополучателями, чтобы общая транспортная работа была минимальной (показатель критерия оптимальности - расстояние). Таблица 8.2 Расстояние между грузообразующими и грузопоглощающими пунктами
Для решения задачи обозначим через хij количество тонн груза, которое должно быть перевезено от i-поставщика j-потребителю. Тогда математическая модель задачи выразится системой уравнений (8.35), а целевая функция, представляющая собой сумму произведений расстояний на соответствующий объем перевозок груза в тоннах, уравнением (8.36).
Минимизировать
Полученная система уравнений (8.35) является линейно зависимой, так как любое ее уравнение можно представить в виде линейной комбинации остальных уравнений. Действительно, если из суммы уравнений 1, 2, 3 вычесть сумму уравнений 4, 5, 6, то получим уравнение 7 и т. д. Число линейно независимых уравнений должно быть меньше на одно общего числа уравнений в системе, т. е. базис системы должен быть равен количеству уравнений в системе ограничений за вычетом единицы. Так как общее число уравнений в системе определяется суммой поставщиков и потребителей, то в базисе должно быть уравнений т + п-1, (8.37) где: m - число поставщиков; n - число потребителей. Для решения транспортной задачи методом потенциалов составляется базисный план, который заносится в таблицу, называемую матрицей распределительного метода. Матрица - прямоугольная таблица чисел, состоящая из m строк и n столбцов, в которой на пересечении строк и столбцов, обычно в правых верхних углах, указывается расстояние между данным поставщиком и потребителем (в общем случае указывается показатель целевой функции). К базисному плану предъявляются следующие требования: он должен быть допустимым, содержать m + n — 1 загруженных клеток, чтобы загруженные клетки были расположены в порядке вычеркиваемой комбинации. Для сокращения числа итераций при последующем решении желательно, чтобы базисный план был, возможно, ближе к оптимальному. Напомним, что план считается допустимым, если все возможности поставщиков используются, а спрос всех потребителей удовлетворяется. Однако для решения транспортной задачи методом потенциалов (или любым другим методом линейного программирования) необходимо, чтобы матрица имела определенное число загруженных клеток и чтобы загруженные клетки были расположены в порядке вычеркиваемой комбинации. Число неизвестных Х в задаче равно произведению числа строк m на число столбцов n. Максимальное число уравнений, которое можно получить при решении транспортной задачи, определяется суммой поставщиков и потребителей, т. е. т + п. В этом случае, как показано выше, система уравнений является линейно зависимой. Для решения транспортной задачи базис системы должен содержать т + п-1 уравнений, а следовательно, в матрице должно быть т + п-1 загруженных клеток. Условие вычеркиваемой комбинации загруженных клеток означает, что если, последовательно проходя по строкам и столбцам матрицы, можно вычеркнуть все загружаемые клетки, то их комбинация считается вычеркиваемой. При этом загруженная клетка вычеркивается, если она единственная в своей строке или своем столбце. Самый простой способ составления базисного плана - это так называемый способ северо-западного угла. Сущность этого способа заключается в следующем. Распределение груза по потребителям начинается с клетки А1 В1 (табл. 8.3). Если предложение больше спроса, то следующая цифра ставится в клетке А1 В2 и т. п. Таблица 8.3 Базисный план, составленный способом северо-западного угла
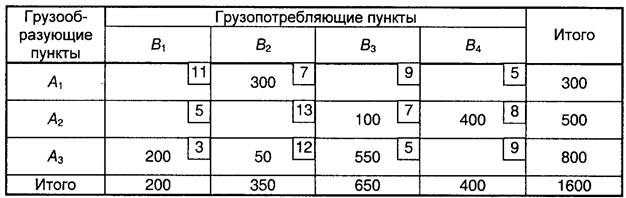
Клетки таблицы, в которых отмечено количество груза, перевозимого от грузоотправителя к данному грузополучателю, называются загруженными. Остальные клетки - незагруженными. Способ северо-западного угла является плохим способом составления базисного плана, так как в большинстве случаев дает базисный план, очень далекий от оптимального. Положительная сторона его заключается в том, что он очень прост и обеспечивает получение т + п-1 загруженных клеток. При полученном базисном плане закрепления поставщиков за потребителями (табл. 8.3), транспортная работа составит 200 • 11 +100 • 7 + 250 • 13 + 250 • 7 + 400 • 5 + 400 -9 = 13500 т-км. Несколько лучшими способами составления базисного плана являются способы наименьшего элемента по столбцу или наименьшего элемента по строке. При составлении базисного плана способом наименьшего элемента по столбцу поочередно в столбцах матрицы отмечаются клетки с минимальным значением ау и в них заносятся поставки. Если при записи поставок спрос по столбцу удовлетворен не полностью, ищется следующий по величине показатель aij, и так до полного удовлетворения спроса. Только после этого переходят на следующий столбец. Когда в столбце два или несколько одинаковых по величине минимальных показателей aij, то поставки могут быть размещены в любом из них. Результаты составления базисного плана этим способом приведены в табл. 8.4. Таблица 8.4 Базисный план, составленный способом наименьшего элемента по столбцу
При базисном плане, полученном способом наименьшего элемента по столбцу (табл. 8.4), транспортная работа составит 200-3 + 300-7 + 50-12 +100-7 +550-5 + 400-8 = 9950т-км. Базисный план получился лучше (транспортная работа сократилась на 3550 т-км), однако нельзя сказать, является ли он оптимальным или нет. Для ответа на этот вопрос необходимо составленный базисный план проверить на оптимальность. Для этих целей разработано несколько методов. Наиболее широкое применение находят методы потенциалов (метода МОДИ), Хичкока, Креко. Идея метода потенциалов была высказана Л. В. Канторовичем в 1940 г. В 1951 г. американский ученый Дж. Д. Данциг предложил ту же идею, назвав ее модифицированным распределительным методом (МОДИ). Идея метода потенциалов, или метода МОДИ, заключается в том, что для проверки допустимого базисного плана на оптимальность определяются особым образом числа, называемые потенциалами. Главное требование к потенциалам заключается в том, чтобы каждый показатель aij в загруженной клетке был равен сумме потенциалов своих строки и столбца aij=Vi+Vj, (8.38) где: Ui - значение потенциала строки; Vj - значение потенциала столбца. Совершенно безразлично, с какой строки или столбца начинать определение потенциалов. Безразлично также, каким по величине взять первый по счету потенциал, так как произвольно определяется только первый потенциал. Все остальные потенциалы жестко связаны с ним, и после того, как первый потенциал установлен, он определяется единственно возможным способом. Определенные потенциалы строк и столбцов должны обеспечить значение потенциалов загруженных клеток равными нулю. Потенциалы незагруженных (свободных) клеток определяются по формуле
где: Еij - потенциал свободной клетки. При решении задач на минимум оптимальный вариант допустимого плана получается в том случае, когда во всех загруженных клетках стоят нулевые потенциалы, а потенциалы всех свободных клеток являются положительными величинами. Наличие свободных клеток с отрицательными значениями потенциалов показывает, что имеются резервы улучшения варианта решения. При решении задач на максимум оптимальный вариант допустимого плана получается тогда, когда во всех загруженных клетках стоят нулевые потенциалы, а потенциалы всех свободных клеток являются отрицательными величинами. Проверим на оптимальность базисный план, составленный способом наименьшего элемента по столбцу. Для этого матрицу распределительного метода дополним одним столбцом и строкой (табл. 8.5). Поставим в строке A1 величину потенциала, равную нулю. Тогда, согласно формуле (8.38), потенциал столбца В2 будет равен 7. Потенциал строки A3 будет равен 5, а столбца B3 - 0 и т. д. Потенциалы незагруженных клеток находим по формуле (8.39).
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-01-14; просмотров: 122; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.219.14.63 (0.13 с.) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||