Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Измеритель-регулятор температуры ТРМ202 ⇐ ПредыдущаяСтр 3 из 3
Применяется для измерения, регистрации или регулирования температуры теплоносителей и различных сред в холодильной технике, сушильных шкафах, печах различного назначения, пастеризаторах и другом технологическом оборудовании, а также для измерения других физических параметров (веса, давления, влажности и т. п.). Особенности измерителя-регулятора температуры ТРМ202: • Два универсальных входа для подключения широкого спектра датчиков температуры, давления, влажности и др. Можно подключать два датчика разного типа; • Два независимых канала регулирования измеряемых величин по двухпозиционному закону или аналоговому П-закону; • Регулирование и одновременная регистрация измеряемой величины при установке ЦАП 4…20 мА в качестве второго выходного устройства; • Одноканальное трехпозиционное регулирование (с двумя разными уставками); • Вычисление и регулирование разности измеряемых величин; • Вычисление и индикация квадратного корня из измеряемой величины (например, для регулирования мгновенного расхода); • Встроенный интерфейс RS485; • Конфигурирование на ПК или с лицевой панели прибора;
• Уровни защиты настроек прибора для разных групп специалистов; • Импульсный источник питания 90...245 В
Диафрагма ДКБ-150
Назначение диафрагмы ДКБ Диафрагмы камерные ДКБ предназначены для создания перепада давления при измерении расхода жидкостей, газов или пара по методу переменного перепада давления во фланцах трубопровода.
Конструктивные особенности диафрагмы ДКБ Представляют собой сборочный узел, состоящий из самой диафрагмы, двух кольцевых камер («плюсовой» и «минусовой») корпуса, прокладки и патрубков отбора давления. Отбор давления среды в корпуса кольцевых камер ДКС выполняется через кольцевую щель.
Дифманометры ДМ-23573 предназначены для пропорционального преобразования разности давлений в выходной унифицированный сигнал взаимной индуктивности.
ДМ-23573 (дифманометры) применяются в системах контроля, автоматического регулирования и управления технологическими процессами при измерении расхода жидкости, газа или пара по разности давления в сужающих устройствах, разности вакуумметрических и избыточных давлений, уровня жидкости по давлению гидростатического столба, находящегося под атмосферным, избыточным или вакуумметрическим давлением. Преобразователи ДМ-23573 предназначены для измерения параметров неагрессивных газов и жидкостей при температуре окружающего воздуха -30...+50 °С и относительной влажности до 95 %. Основные технические характеристики:
Регулятор КСД-3-1000
КСД – дифференциально-трансформаторный для измерения неэлектрических величин (давления, уровень, расхода и т.д.) имеющих унифицированный входной сигнал (0-10мГн или +-10мГн), приборы могут иметь: линейную шкалу для уровня, давления и т.п.; квадратичную шкалу для расхода. Приборы выполнены в стальном корпусе с размерами 160х200х500мм, щитового исполнения. На передней панели прибора расположена система регистрации, тумблер включения и сигнализацию «Прибор включен», тумблер включения – перемещения диаграммной ленты. На верхней панели под корпусом находится система управления сигнализацией, шкала регулировки 0-100% при этом погрешность срабвтывания сигнализирующего устройства не должна превышать +-1,5% значения измеряемой величины относительно заданных значений шкалы прибора. Климатическое исполнение приборов УХЛ4.1 – температура, при которой прибор может работать от +5 грудусов Цельсия до +50 градусов Цельсия при влажности не более 80%. В зависимости от модификации приборы могут иметь:
- 2-х или 3-х контактное позиционное сигнализирующие устройство;
- реостатный задатчик со 100% зоной пропорциональности для работы в комплекте с прибором П1723 (регулирующий прибор) для решения сигнализации «ПИ» - регулирования. - дополнительно устанавливается преобразователь входного сигнала в унифицированный токовый выходной сигнал (0-5мА или 4-20мА).
По данным экспериментальной кривой разгона технологического объекта управления строим кривую:
С помощью касательной к экспериментальной кривой в точке перегиба определяем То и τ: То=500 с τ=160 с По формуле:
 Рис.3. Экспериментальная и эквивалентная кривые разгона Рис.3. Экспериментальная и эквивалентная кривые разгона
   
  Для оценки точности приближения экспериментальных данных к решению уравнения эквивалентного объекта, полученного в результате идентификации, применяют различные критерии. Наиболее распространенным из них является среднеквадратическое отклонение экспериментальных данных от характеристики, полученной в результате расчетов: Для оценки точности приближения экспериментальных данных к решению уравнения эквивалентного объекта, полученного в результате идентификации, применяют различные критерии. Наиболее распространенным из них является среднеквадратическое отклонение экспериментальных данных от характеристики, полученной в результате расчетов:
 , ,
где θ 1(ti) - экспериментальное значение температуры в момент времени ti; θ2(ti) - расчетное (эквивалентное) значение температуры в момент времени ti; n – число экспериментальных точек.
Таким образом, в дальнейших расчетах используем эквивалентный объект, описываемый с точностью 26 % дифференциальным уравнением 1-го порядка с самовыравниванием и запаздыванием со следующей передаточной функцией:
Найдем величину усиления объекта: kо = (θуст- θ0)/М=(90-80)/3=3.3 kо = 3.3 Передаточная функция объекта будет иметь вид: W (p)=(3.3* e -160 p)/(500 p +1) Безразмерные показатели объекта и переходного процесса: τ/ T0=0,32 tрег/ τ=0,19
Выбор регулятора К выбору типа регулятора следует подойти очень внимательно, так как от него зависит надежность устойчивой работы АСР. Кроме правильного выбора следует также и правильно настроить регулятор, только тогда мы добьемся требуемое качество регулирования. В зависимости от свойств объектов управления, определяемых его передаточной функцией и параметрами, и предполагаемого вида переходного процесса выбирается тип и настройка линейных регуляторов.
П – регулятор со статическим и астатическим ОР – при любой инерционности и времени запаздывания, определяемом соотношением τ/То<0,2; ПИ – регулятор – при любой инерционности и времени запаздывания ОР, определяемом соотношением τ/То<1;
ПИД – регуляторы при условии τ/То<1 и малой колебательности исходных процессов. В нашем случае подходящим является ПИ-регулятор, т.к. по условиям задачи на объект действуют возмущения, вызывающие отклонения уровня, соответствующие 20% при перестановке регулирующего органа и по виду переходного процесса и передаточной функции. Если при дальнейших расчетах окажется, что ПИ-регулятор не удовлетворяет заданным условиям, нам необходимо выбрать более сложный (и, следовательно, более дорогой) ПИД-регулятор, который имеет лучшие показатели регулирования. За критерий оптимальности регулирования для нашего случая примем процесс с 20% перерегулированием, обеспечивающий малое время регулирования переходного процесса и имеющий динамическую ошибку меньшую, чем при критерии с минимальным временем регулирования, тем более, что объект допускает 20% перерегулирование.
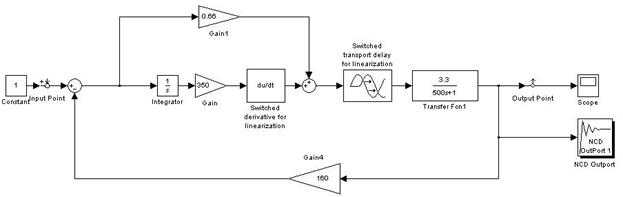
kp=0.7/(k0 τ /T0)=0.7/(3.3*0.32)=0.66 Tu = 0.7*T0 =0.7*500 = 350 Ku = Tu = 350 Для того чтобы построить и проанализировать переходную и частотные характеристики, необходимо в программе Matlab – Simulink собрать схему. Но для того, чтобы построить схему, сначала необходимо построить структурно-функциональную блок-схему САР (Рис.4), а потом на основе этой схемы построить математическую схему САР (Рис.5).
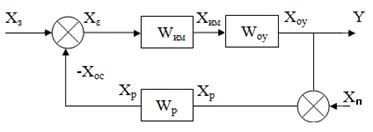
Рис.4 Структурно-функциональная блок-схема системы автоматического регулирования температуры ЗО – задающий орган; Р – регулятор; ИМ – исполнительный механизм; ОУ – объект управления.
Рис.5 Математическая схема системы автоматического регулирования температуры. Wp – передаточная функция ПИ-регулятора; Wим – передаточная функция исполнительного механизма; Wоу – передаточная функция объекта управления.
Рис.6 Система автоматического регулирования температуры сушки кирпича-сырца
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-01-08; просмотров: 100; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.225.55.198 (0.028 с.) |

 • Быстрый доступ к изменению уставок с лицевой панели прибора;
• Быстрый доступ к изменению уставок с лицевой панели прибора;
 Диафрагма ДКБ применяется при диаметре условного прохода от 50 до 500 мм включительно и избыточном давлении в трубопроводе не более 10 МПа.
Диафрагма ДКБ применяется при диаметре условного прохода от 50 до 500 мм включительно и избыточном давлении в трубопроводе не более 10 МПа. 2.5 Дифманометр ДМ-23573
2.5 Дифманометр ДМ-23573

 - реостатное выходное устройство для дистанционной передачи показаний на дублирующий прибор;
- реостатное выходное устройство для дистанционной передачи показаний на дублирующий прибор; 3. Расчетная часть
3. Расчетная часть строим эквивалентную кривую с запаздыванием на 160 сек:
строим эквивалентную кривую с запаздыванием на 160 сек:







 И – регулятор со статическим ОР – при медленных изменениях возмущений и малом времени запаздывания (τ/То<0,2);
И – регулятор со статическим ОР – при медленных изменениях возмущений и малом времени запаздывания (τ/То<0,2); Для определения параметров настройки типовых регуляторов в АСР с объектом первого порядка с запаздыванием при различных критериях оптимальности можно воспользоваться следующими формулами:
Для определения параметров настройки типовых регуляторов в АСР с объектом первого порядка с запаздыванием при различных критериях оптимальности можно воспользоваться следующими формулами: