Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Двухкоординатная РЛС. Структурная схема
Двухкоординатная РЛС. Диаграммы напряжений
Принцип действия. Синхронизатор (СХ) РЛС непрерывно вырабатывает синхронизирующий импульс (СИ) с заданным периодом следования (частотой следования). При поступлении синхронизирующего импульса (СИ) в радиопередатчик (РПД) он генерирует мощный импульс сверхвысокочастотной (СВЧ) энергии заданной длительностью, который через антенный переключатель (АП), препятствующий попаданию этой энергии в радиоприемник (РПМ), поступает в антенну (А) и излучается ею в пространство. Момент излучения зондирующего импульса определяет начало очередного периода исследования пространства. На диаграмме напряжений этот момент обозначен t. 0 Зондирующий импульс (ЗИ) распространяется в пространстве с постоянной скоростью и часть энергии отражается от встречающихся на его пути целей. Отраженный СВЧ импульс от некоторой цели достигает антенны РЛС с задержкой ∆ t относительно момента излучения зондирующего импульса (ЗИ), пропорциональной дальности до цели D. С антенны через антенный переключатель (АП) отраженный сигнал поступает на вход радиоприемника (РП), с выхода которого продетектированное напряжение (видеосигнал) подается на индикатор кругового обзора (ИКО). На экране индикатора, совместно с отметками от целей, высвечиваются через равные интервалы специально сформированные световые метки дальности. Интервал между метками дальности ∆ R соответствует определенному расстоянию в пространстве (обычно 5, 10 км), что позволяет с достаточной точностью определить дальность до целей. Состав ОРЛ-Т ● антенно-фидерная система (АФС); ● приёмно-передающая аппаратура первичного канала; ● приёмно-передающая аппаратура вторичного канала (при наличии); ● АПОИ –аппаратура первичной цифровой обработки радиолокационной информации (при сопряжении с АС УВД); ● аппаратура передачи данных по узкополосной линии связи (при сопряжении с АС УВД); ● система ТУ-ТС - телеуправления, контроля и телесигнализации для дистанционной эксплуатации ОРЛ-Т техническим составом. Ввиду недостаточной яркости свечения собственных ИКО ОРЛ-Т сопрягаются с индикаторами типа «ИСТРА», «КОМЕТА», с аппаратурой преобразования в телевизионный сигнал типа «СТРОКА-Б», «СТРОКА-2», «СТРОКА-Ц» или с АС УВД через АПОИ.
Виды: Основными разновидностями ОРЛ-Т, используемыми в России, являются П-35, П-37 («МЕЧ»), 1 РЛ-139, I РЛ-118, «СКАЛА-М» (ТРЛК-10), «СКАЛА-МПР» (ТРЛК-11), А0РЛ-85Т (АОРЛ-85ТК). Аэродромные РЛС Назначение. Предназначен для контроля и УВД в районе а/д и для ввода ВС в зону действия средств посадки. Обеспечивают обнаружение ВС и изменение их полярных координат (A,D) (находящихся на небольших высотах и на близком удалении от РЛ) с последующим представлением информации о воздушной обстановке в центры УВД. ОРЛ-А должны иметь эффективные средства подавления сигналов, отраженных от местных предметов и гидрометеоров. Информация от ОРЛ-А используется диспетчерами подхода, круга и посадки.
С антенны через антенный переключатель (АП) отраженный сигнал поступает на вход радиоприемника (РП), с выхода которого продетектированное напряжение (видеосигнал) подается на индикатор кругового обзора (ИКО). На экране индикатора, совместно с отметками от целей, высвечиваются через равные интервалы специально сформированные световые метки дальности. Интервал между метками дальности ∆ R соответствует определенному расстоянию в пространстве (обычно 5, 10 км), что позволяет с достаточной точностью определить дальность до целей. При использовании ОРЛ-А в составе АС УВД они обязательно сопрягаются с вторичными р/л-ми, образуя р/л комплекс и имеют в своем составе АПОИ.
Размещение. Устанавливают вблизи КТА, но не ближе 120 м от оси ВПП и на удалении не более 3 км от АКДП. ОРЛ-А ориентируют относительно северного направления магнитного меридиана для обеспечения р/л контроля за полетами ВС в секторах ответственности аэродромной зоны ОВД (в направлениях коридоров а/мА). Антенны устанавливают на позиции так, чтобы величины углов закрытия по углу места не превышали 0,5º. Часто ОРЛ-А совмещают с посадочными р/л и автоматическим радиопеленгатором при обеспечении минимально-допустимого расстояния между ними. Основным требованием к ОРЛ-А является обеспечение достаточной максимальной дальности действия на высотах не менее 6100 м и небольшой минимальной дальности. Аэродромные обзорные радиолокаторы ОРЛ-А можно разделить на (варианты В1, В2 и В3), соответственно с максимальной дальностью действия 160, 100 и 46 км; В учебнике Зырянова - Б1 с максимальной дальностью 160 км и минимальной – 2 км и Б2 с максимальной дальностью 50... 100 км и минимальной - 1,5 км. СКП измерения координат по выходу с АПОИ должна быть не более 0,4º по азимуту и не более 200м по дальности (Разрешающая способность по нормам ИКАО-4º и 230м). В ОРЛ-А круговой обзор с периодом не более 6с. Состав ● АФС. ● Приемо-передающая аппаратура первичного канала и вторичного (при наличии). ● АПОИ (при сопряжении с АО или АС УВД). ● Аппаратура передачи данных по узкополосной линии связи (при сопряжении с АС УВД). ● Система ТУ-ТС. ОРЛ-А сопрягается с аппаратурой отображения типа «символ-д», «знак», «норд» или АС УВД.
41. Посадочные РЛС Назначение, информация на индикаторе. С помощью посадочных РЛС осуществляется наземный контроль за снижением ВС по линии курса (ЛК) и глиссады (ЛГ) путем определения удаления ВС от расчетной точки приземления (ТП) и его отклонений от ЛК и ЛГ. РЛС-П является трехкоординатной станцией, осуществляющей обзор ВП в зоне предпосадочного и посадочного маневров. Для оценки отклонений на индикаторе устройства (ИУ) строятся 2 изображения: курсовое и глиссадное. Отображение пространства бывает 2-х видов: клиновидное и прямоугольное. На ИУ, кроме ЛВ и ЛГ, отображаются: · Линии равных высот(ЛРВ) · Линии равныз отклонений ЛРО от ЛК и ГК · Метки дальности · Метки азимутов · Метки углов места. Дальность откладывается по горизонтальной оси и может иметь линейный и нелинейный масштабы. Для РЛС-П выбран сантиметровый диапазон волн (около 3.2см), т.к. предъявляются высокие требования по разрешающей способности и точности определения отклонения ВС от ЛЗП. Этот диапазон позволяется создать антенны приемлемых размеров. Размещение. Антенная и высокочастотная части РЛС размещаются вблизи ВПП. Зону обзора выбирают так, чтобы захватить точку качания самолетом ВПП и перекрыть сектор пространства не менее чем на ±10° от оси ВПП в горизонтальной плоскости и от 0 до 7° в вертикальной плоскости. РЛС резервирована. Основная аппаратура, обрабатывающая инфу, находится в техническом зале, индикаторы и пульты управления – в зале КДП. Для длинных ВПП РЛС устанавливается таким образом, чтобы посадка была возможна с обоих направлений. Для оценки значения отклонения ВС от ЛЗП применяют 3 способа (в зависимости от удаления ВС):
· Визуально сравнивают линейное отстояние середины отметки ВС от ЛЗП с отстоянием ЛРО от ЛЗП и умножают на Δl; · Сравнивают величину отметки ВС с отклонением середины отметки от ЛЗП; · Сравнивают отклонение отметки от ЛЗП и линейное расстояние между контрольными уголовными метками.
Погрешности. Систематические погрешности при определении отклонения отметок ВС в основном зависят от точности изображений линий, определяющих заданную траекторию посадки, линий и меток, используемых для определения отклонений отметки от ЛЗП. Случайные погрешности вызываются неточностью определения середины отметки ВС и интерполяции расстояния между ЛК, ЛГ и ЛРО или между метками азимутов и углов места. СКП определения середины отметки зависит от угловой величины отметок по азимуту и углу места. Их значения определяются шириной ДН антенны, увеличенной на угловой размер диаметра по азимуту и углу места. Их значения определяются шириной ДН антенны, увеличенной на угловой размер диаметра пятна луча ЭЛТ. Размер отметки при приближении ВС увеличивается из-за того, что с ростом мощности отражений от ВС сигнал принимается все большей шириной ДНА, а также вследствие изменения ракурса ВС. MAX допустимая погрешность не должна превосходить: · В горизонтальной плоскости – 0,006Д или 9м (большее из значений) · В вертикальной плоскости – 0,004Д или 9м · По дальности – (30+0,03Д1) м Д-дальность от антенны до ВС Д1-расстояние от антенны до опорной точки РМС.
РЛС обзора летного поля Назначение. Радиолокатор ОЛП предназначен для обзора летного поля в условиях плохой видимости. Информация, получаемая с помощью этого радиолокатора, может использоваться диспетчером ДПР и СПД. Особенности функционирования. Радиолокатор ОЛП работает на волне 8мм. Передатчик магнетронного типа вырабатывает зондирующие импульсы, обеспечивающие дальность действия локатора приблизительно 8км. Для излучения зондирующих импульсов и приема отраженных сигналов используются отдельные антенны, расположенные друг над другом. Такое конструктивное решение позволило отказаться от антенных переключателей и уменьшить минимальную дальность действия станции до 100м. Частота вращения антенны 36об/мин. Ширина диаграммы направленности антенн в горизонтальной плоскости составляет 14´, в вертикальной – 18°. Длительность излучаемых импульсов равна 0,05 мкс. Для борьбы с сигналами от гидрометеоров используются поляризационные решетки, расположенные перед облучателями антенн.
Размещение. Обычно радиолокатор ОЛП размещается на каком-либо высоком здании аэропорта. Антенны закрываются радиопрозрачным укрытием. Для повышения эффективности использования радиолокаторов разработана специальная аппаратура преобразования радиолокационных сигналов в телевизионные.
Метеорологические РЛС Метеорологические РЛС служат для анализа метеорологической обстановки с целью повышения безопасности и регулярности навигации при УВД. При этом используются радиолокаторы сантиметрового и миллиметрового диапазонов, позволяющие наблюдать и исследовать облака и осадки, а также турбулентные атмосферные образования. Это возможно благодаря тому, что в указанных диапазонах волн уровень отраженных от атмосферных образований сигналов достаточен для их обнаружения.
Возможности: Метеорологические РЛС позволяют непрерывно наблюдать за атмосферными образованиями в области пространства радиусом до нескольких сотен километров, измерять характеристики этих образований и классифицировать их, получать горизонтальные и вертикальные разрезы атмосферы, определять структуру облачных слоев и измерять их высоту. Метеорологические РЛС представляют собой обычные импульсные РЛС. Оптимальными при обнаружении ближней и дальней границ дождя на больших расстояниях являются волны длиной 2...3 см. На небольших расстояниях наиболее эффективна длина волны, лежащая в области миллиметровых волн. Только при обнаружении дальней границы очень сильных дождей на расстоянии 250 км оптимальными становятся волны длиной 4...5 см. Обнаружение различных атмосферных образований вызывает необходимость использования в метеорологических РЛС одновременно нескольких длин волн (например, 2 см, 3 см, 8 мм, 4 мм, 2 мм). Современные модели погодных РЛС являются преимущественно импульсными и опираются в своей работе на использование эффекта Доплера. В метеорологических РЛС применяются три типа индикаторов: индикатор кругового обзора (ИКО), индикатор дальность-высота (ИДВ) и амплитудный индикатор (ИА).
Режимы работы: 1) Режим кругового обзора. В этом режиме антенна вращается в горизонтальной плоскости с частотой 6 об/мин при постоянном угле наклона в вертикальной плоскости. На индикаторе кругового обзора создается общая картина состояния атмосферы в зоне действия станции. 2) Режим ступенчатого обзора. В этом режиме антенна вращается в горизонтальной плоскости, а ее наклон в вертикальной плоскости изменяется после каждого оборота антенны. Величину изменения наклона антенны после каждого оборота можно регулировать от 0 до 5°. Указанным образом наклон антенны в вертикальной плоскости в данном режиме изменяется в пределах от 1 до 11°. На ИКО создается общая картина состояния атмосферы в зоне действия станции под различными углами места.
3) Режим вертикального обзора. Антенна качается в вертикальной плоскости с частотой 2 качания в одну минуту при постоянном азимуте. На ИДВ отображается вертикальный разрез атмосферных образований при выбранном азимуте. 4) Режим вертикального зондирования. В этом режиме антенна неподвижна, но может быть установлена в любом направлении, под любым углом в пределах 1...105°. Радиолокатор в данном режиме просматривает узкий выбранный сектор пространства. Максимальная дальность обнаружения ливней и гроз 250...300 км, а интенсивных обложных осадков 100 км.
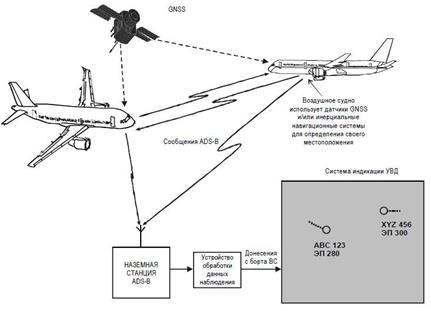
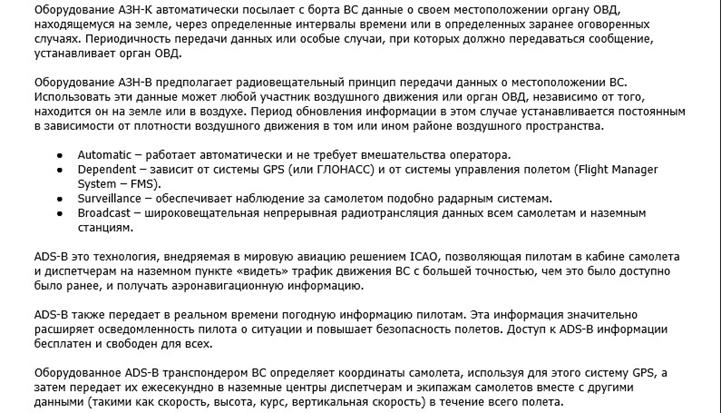
Наблюдение с помощью АЗН Автоматическое зависимое наблюдение (АЗН) - метод наблюдения, при котором воздушное судно (или любой другой объект) автоматически с определенным периодом передает другим пользователям собственные координаты и другую информацию от своих бортовых систем Назначение. АЗН служит заменой существующей системы вторичной радиолокации (ВОРЛ) и является основой будущей системы организации воздушного движения, строящейся на принципах CNS/ATM с широким использованием технологий спутниковой навигации, цифровой связи и наблюдения. Требования - Частота запроса – 1030 мГц, ответа – 1090 мГц. - Количество антенн в антенной системе – 4 - Дальность обнаружения – не менее 400 км - Азимут 0-360 - Высота обнаружения не менее 20 км - Минимальный 2 угол места не более 0.5 - Количество одновременно сопровождаемых целей – не менее 200 - Вероятность обновления информации каждые 2 сек не менее 0,98 Виды АЗН АЗН-К – адресное (контрактное) АЗН между пилотом и диспетчером, при котором автоматическая передача сообщений начинается после осуществления по инициативе воздушного судна соединения с органом УВД. АЗН-В – АЗН радиовещательного типа, при котором осуществляется периодическая (один раз в секунду) передача собственных координат и других данных с борта воздушного судна по принципу «все для всех» в радиовещательном режиме любым заинтересованным наземным (службы УВД, авиакомпании, специальные органы) и/или бортовым пользователям, имеющим соответствующее оборудование АЗН-В. Функциональная схема
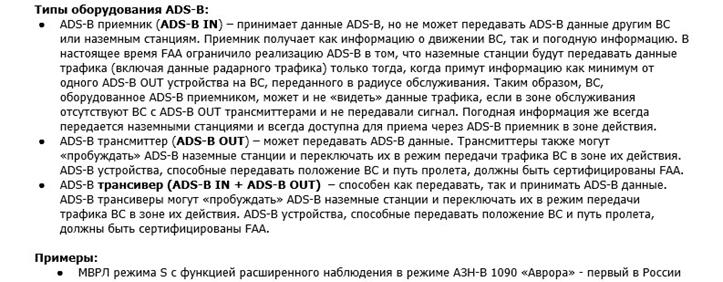
Типы оборудования АЗН-В 1) АЗН-В Out – обеспечивает автоматическую передачу в цифровом виде основных паромеров воздушного судна: Координаты; Опознавательный индекс и др. 2) АЗН-В In – обеспечивает прием информации АЗН-В Out от других пользователей. Для реализации этой функции воздушное судно должно иметь соответствующую аппаратуру приема и индикации.
Принцип работы АЗН-В. Оборудованное бортовым ответчиком АЗН-В воздушное судно, самостоятельно определяя свои координаты по спутнику (GPS, ГЛОНАСС, собственно по этой причине технология и называется спутникозависимой), передает данные о своем местоположении на наземные станции АЗН-В в течение всего полёта. Вне зависимости от поступления запроса от наземного запросчика, примерно каждую секунду самолетом передается расширенный сквиттер (extended squitter), этот сквиттер содержит координаты месторасположения воздушного судна. Среди данных, помимо координат, транслируются курс, барометрическая высота, статус воздушного судна (наличие/отсутствие аварий, необходимость медицинской помощи, захват самолета, отказ радиосвязи). ВАРИАНТ ОТВЕТА
+ДОПОЛНЕНИЕ ИЗ КОНСПЕКТА ЛЕКЦИИ АЗН-К предназначено для наблюдения за ВС при приеме информации с борта ВС, имеющего соглашение на передачу данной информации органу ОВД. ЛПД АЗН-К: · спутниковая ЛПД · ЛПД в диапазоне ОВЧ (VDL) · ЛПД в диапазоне ВЧ (HFDL) · другие ЛПД Частота передачи данных при полете в океаническом ВП составляет от 15 до 25 мин. АЗН-К применяется в ВП, где используется процедурное управление.
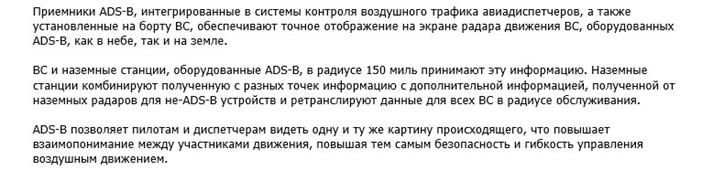
АЗН-В предназначена для наблюдения за ВС при приема информации с борта ВС о его местоположении, а также другой информации, передаваемой по ЛПД всем заинтересованным пользователям. ЛПД АЗН-В: 1090 ES. АЗН-В сервисы: 1) ADS- B – передача информации с борта ВС всем заинтересованным пользователям; 2) ADS- R – ретрансляция информации наземными станциями; 3) TIS- B – передача наземных радарных систем данных о ВС, не оборудованных ответчиками АЗН, в систему АЗН; 4) FIS- B – наземные станции передают информацию о погоде и ограничениях по маршруту. Периодичность (частота) выдачи координатной информации при АЗН зависит от характера движения ВС в конкретной ситуации. Практически рассматриваются 10 ситуаций: А1 – полёт по прямолинейному участку ВТ без тенденций нарушения её ограничений; А2 – маневр в горизонтальной плоскости; А3 – маневр в горизонтальной плоскости (изменение эшелона); А4 – тенденция к нарушению границ ВТ (маршрута); А5 – нарушение границы ВТ (маршрута); А6 – тенденция с нарушению установленных норма эшелонирования; А7 – нарушение установленных норм эшелонирования; А8 – полёт к особых условиях (погода, внешняя обстановка); А9 – особые случаи в полёте (технические неполадки); А10 – полёты, требующие специального контроля.
|
|||||||||
|
|
Последнее изменение этой страницы: 2020-12-17; просмотров: 818; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.243.184 (0.069 с.) |
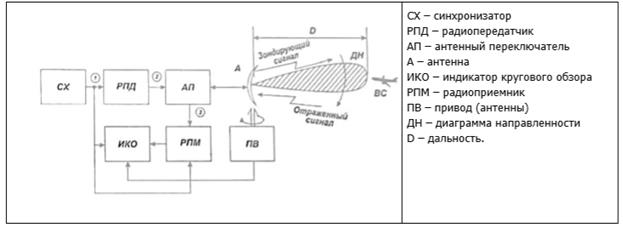

 Принцип действия. Синхронизатор(СХ) РЛС непрерывно вырабатывает синхронизирующий импульс (СИ) с заданным периодом следования (частотой следования). При поступлении синхронизирующего импульса (СИ) в радиопередатчик (РПД) он генерирует мощный импульс сверхвысокочастотной (СВЧ) энергии заданной длительностью t3(время запаздывания), который через антенный переключатель (АП) и излучается ею в пространство. Момент излучения зондирующего импульса определяет начало очередного периода исследования пространства. На диаграмме напряжений этот момент обозначен t0 Зондирующий импульс (ЗИ) распространяется в пространстве с постоянной скоростью и часть энергии отражается от встречающихся на его пути целей. Отраженный СВЧ импульс от некоторой цели достигает антенны РЛС с задержкой Δt относительно момента излучения зондирующего импульса (ЗИ), пропорциональной дальности до цели D.
Принцип действия. Синхронизатор(СХ) РЛС непрерывно вырабатывает синхронизирующий импульс (СИ) с заданным периодом следования (частотой следования). При поступлении синхронизирующего импульса (СИ) в радиопередатчик (РПД) он генерирует мощный импульс сверхвысокочастотной (СВЧ) энергии заданной длительностью t3(время запаздывания), который через антенный переключатель (АП) и излучается ею в пространство. Момент излучения зондирующего импульса определяет начало очередного периода исследования пространства. На диаграмме напряжений этот момент обозначен t0 Зондирующий импульс (ЗИ) распространяется в пространстве с постоянной скоростью и часть энергии отражается от встречающихся на его пути целей. Отраженный СВЧ импульс от некоторой цели достигает антенны РЛС с задержкой Δt относительно момента излучения зондирующего импульса (ЗИ), пропорциональной дальности до цели D.