
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Машины переменного тока: общин сведения и классификация электродвигателей переменного токаСтр 1 из 9Следующая ⇒
План лекции 3.2.1 Машины переменного тока: общин сведения и классификация электродвигателей переменного тока 3.2.2 Асинхронные машины: принцип действия, устройство, параметры и основные характеристики 3.2.3Асинхронные двигатели с фазным ротором, их управление и защита. 3.2.4 Асинхронные двигатели в строительных машинах 3.2.4.1 Асинхронный электропривод башенных кранов, подъемников, лебедок и конвейеров 3.2.4.2 Электропривод лифтов: общие сведения и классификация. 3.2.4.3 Управление приводом и защита привода лифтов. 3.2.4.4 Работа частотно-регулируемого электропривода лифтовых установок.
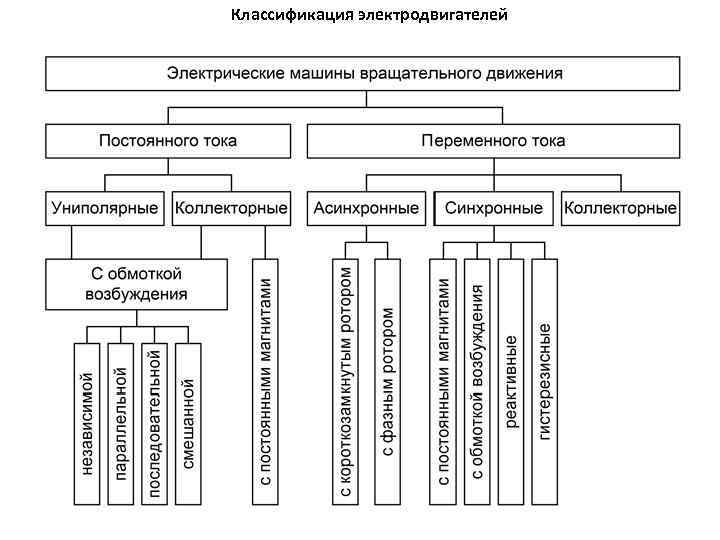
Машины переменного тока: общин сведения и классификация электродвигателей переменного тока Общее представление о классификации и разновидностях электродвигателей дает рисунок 9.1.
Рис. 9.1 Классификация электродвигателей К этой структурной схеме нужны некоторые пояснения.Униполярный генератор (рис. 9.1) — разновидность электрической машины постоянного тока. Впервые изобретен Фарадеем. Содержит проводящий диск, постоянное магнитное поле, параллельное оси вращения диска, 1 токосъёмник на оси диска и 2-й токосъёмник у края диска.
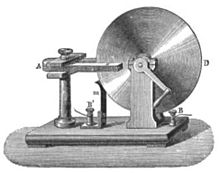
Рис.9.1 Униполярный генератор Фарадея Униполярные генераторы используются для получения постоянных токов большой мощности. Для промышленных целей униполярные двигатели применяются редко. Синхронно-реактивная машина независимого возбуждения использует привычный ротор и статор. Магнитное поле в статоре вырабатывает энергию, которая поступает на обмотку ротора, создавая индукцию тока и крутящий момент, приводящий ротор в движение. Предполагается использовать синхронно-реактивный двигатель на отечественном электромобиле.. Двигатели постоянного тока мы рассматривали на предыдущей лекции. В промышленном масштабе применяются синхронные и асинхронные электромашины, причем синхронные машины используются в основном в качестве генераторов, а асинхронные – в качестве двигателей. Синхронными электрические машины называют потому, что скорость вращения ротора строго совпадает со скоростью магнитного поля статора. У асинхронных машин в двигательном режиме скорость ротора отстает от скорости вращения магнитного поля статора. Разность угловых скоростей называется скольжением.
Несколько слов об устройстве и принципе действия синхронной машины. Устройство. Она состоят из двух основных частей: неподвижного статора и вращающегося внутри него – ротора. Ротор и статор разделены воздушным зазором. Статор трехфазной синхронной машины аналогичен статору асинхронного двигателя и содержит шихтованный цилиндрический сердечник с пазами на внутренней поверхности. Он состоит (рис.9.2) из корпуса 1, цилиндрического сердечника 2, набранного из отдельных пластин электротехнической стали, и трехфазной обмотки 3, уложенной в пазы сердечника.
Рис.9.2 Конструкция синхронной машины: слева – статор, справа – ротор Ротор синхронной машины представляет собой электромагнит постоянного тока, который создает магнитное поле, вращающееся вместе с ротором. Ротор имеет обмотку возбуждения 4, которая через специальные контактные кольца 5 питается постоянным током от выпрямителя или от небольшого генератора постоянного тока, называемого возбудителем. Роторы синхронных машин бывают двух типов: с явно выраженными и неявно выраженными полюсами. Роторы с явно выраженными полюсами (рис. 9.2) применяются в сравнительно тихоходных машинах (80 – 1000 об/мин), например гидрогенераторах; они имеют значительное число полюсов.
Рис.9.3 Конструкция ротора с явно выраженными полюсами Конструктивно роторы этого типа (рис. 9.3) состоят из вала 6, ступицы 7, полюсов 5, укрепляемых в шлицах ступицы, полюсных катушек 4 возбуждения, размещенных на полюсах. Поверхность полюсного наконечника полюсов имеет такой профиль, что магнитная индукция в воздушном зазоре машины распределяется примерно по синусоидальному закону. Для быстроходных машин (турбогенераторы, синхронные двигатели, турбокомпрессоры и т. п.) явнополюсная конструкция ротора неприменима из-за сравнительно большого диаметра ротора и возникающих в связи с этим недопустимо больших центробежных сил. Большей механической прочностью обладает ро
Обмотка возбуждения распределяется в пазах сердечника так, чтобы создаваемое ею магнитное поле было распределено в пространстве по закону, близкому к синусоидальному Рис.9.4 Ротор с неявно выраженными полюсами Принцип работы и ЭДС синхронного генератора. Работа синхронного генератора основана на явлении электромагнитной индукции. При холостом ходе обмотка якоря (статора) разомкнута, и магнитное поле машины образуется только обмоткой возбуждения ротора (рис. 9.5). При вращении ротора синхронного генератора от приводного двигателя ПД с постоянной частотой nо магнитное поле ротора, пересекая проводники фазных обмоток статора AX, BY, CZ (рис.9.5,а) наводит в них ЭДС
Рис. 9.5 Иллюстрация принципа действия синхронного генератора Выше отмечалось, что индукция В в воздушном зазоре распределена по синусоидальному закону B = Bmsin α, где α — угол, отсчитываемый от нейтральной линии, поэтому ЭДС в одном проводнике Обозначив Bm lv = Em, получим e = Emsin (ω t), т.е. ЭДС в проводниках обмоток статора изменяется по синусоидальному закону. ЭДС отдельных проводников каждой обмотки статора сдвинуты по фазе относительно друг друга, поэтому они суммируются геометрически (аналогично ЭДС статора асинхронного двигателя). Действующее значение ЭДС одной фазы определяется выражением:
где k об – обмоточный коэффициент; f = pn 0 /60 – частота синусоидальных ЭДС ; ω — число витков одной фазы обмотки Катушки отдельных фаз статора сдвинуты в пространстве на электрический угол, равный 1200, и их ЭДС образуют симметричную трёхфазную систему. Рис. 9.6 Зависимость ЭДС от тока возбуждения Изменяя ток возбуждения I в, можно регулировать магнитный поток ротора Ф0 m и пропорциональную ему ЭДС E 0 генератора. На рис. 9.6 представлена зависимость E 0 (I в), снятая при номинальной частоте вращения n ном = n 0. Эта зависимость называется характеристикой холостого хода. Форма характеристики напоминает форму кривой намагничивания ферримагнитного сердечника. Характерной особенностью её является отсутствие пропорциональности между магнитным потоком и током возбуждения, что обусловлено явлением насыщения магнитной системы машины. Принцип действия синхронных двигателей рассматривать не будем, т.к. их применение в этом качестве весьма ограничено.
Рис. 9.12 График зависимости частоты вращения ротора трехфазного асинхронного двигателя от скольжения Рис. 9.12-А Механическая характеристика асинхронного двигателя (1) и вентилятора (2) Этот коэффициент, изменяющийся в пределах обычно 1,8-2,8определяет значение критического скольжения Sк двигателя, т.е. скольжения, соответствующего максимальному моменту:
При включении статорной обмотки в сеть ее магнитное поле, не обладая инерцией, начинает вращаться с синхронной частотой n 1, а ротор под влиянием сил инерции остается неподвижным (п2 = 0). Из соотношения п2 = n 1 (1— S) следует, что в момент пуска S = 1, а момент двигателя равен пусковому моменту Мн.
Под его действием ротор начинает вращаться, при этом скольжение уменьшается, а вращающий момент растет до Мк, который достигается при критическом скольжении SK (см.рис. 9.12-A. Дальнейшее нарастание частоты вращения (уменьшение S) приводит к уменьшению М, который будет убывать до установившегося значения, равного противодействующему моменту, приложенному к ротору двигателя. Если этот момент соответствует номинальной нагрузке двигателя, установившийся режим работы машины определяется точкой А на механической характеристике с координатами М = Мн и n 2 = n н. Для построения механической характеристики трехфазного асинхронного двигателя, выбранного для производственного механизма, используют его каталожные данные пн, Мк/Мн, п1,Р2н и соотношения:
Вначале определяют величины номинальных скольжений Непосредственный расчет характеристики в виде зависимости n2=f ( М) ведется с использованием выражения для определения частоты вращения п2 и формулы Клосса:
При этом задают (с небольшим шагом, например 0,05) различные значения скольжения S в пределах от 1 (момент запуска) до 0 (идеальный холостой ход двигателя) и вычисляют величины частоты вращения ротора п2 и моменты М на валу двигателя, им соответствующие. Результаты расчета удобно свести в таблицу. По полученным данным строится механическая характеристика п2 =f(M). Отметим, что расчет с использованием формулы Клосса дает хорошее приближение в рабочей части характеристики, т. е. для п2, изменяющейся от п1 до n к. Однако пусковая часть зависимости n2=f (М) описывается этой формулой с погрешностью. Более точно величину пускового момента Мп определяют по каталожным данным из соотношения Мп/Мк. Для правильного выбора и экономичной эксплуатации электропривода необходимо рассматривать характеристики не только электродвигателя, но и производственного механизма. При этом следует установить, насколько механические свойства электродвигателя соответствуют механическим характеристикам производственного механизма (ПМ). Сопоставление механических характеристик приводного электродвигателя и производственного механизма позволяет оценить соответствие электропривода этому механизму и определить параметры того режима, в котором будет работать система «электродвигатель — приводной механизм» (частота вращения, вращающий момент двигателя, его мощность в этом режиме, величина потребляемой из сети энергии и др.).
Механические характеристики двигателя и ПМ при этом строят в одних и тех же осях. Координаты точки пересечения этих кривых и характеризуют рабочий режим системы. На рис. 9.12-А в качестве примера приведены механические характеристики АД и вентилятора, работающего в продолжительном режиме с постоянной нагрузкой. По координатам их точки пересечения В можно определить частоту вращения пр ротора двигателя, а следовательно, и вала ПМ в рабочем режиме, найти вращающий момент приводного двигателя Мр, по величине которого вычислить и другие параметры рабочего режима. Например, значение мощности на валу приводного электродвигателя можно получить из выражения: Ра = 0,105 Мрпр. С учетом того, что активная мощность Рх подводится к обмоткам статора от сети, она определяется соотношением Рх = Р2/η, где η \ - КПД электродвигателя. Можно подсчитать количество электроэнергии, потребляемой им из сети за определенный промежуток времени t:. W= Р1t. Рис. 9.13 Принципиальная схема ротора асинхронного двигателя с фазным ротором Широкое распространение АД с фазным ротором получил за счет ряда серьезных преимуществ перед другими машинами подобного рода. Среди них следует отметить большой вращающий момент при запуске, а также относительно постоянную скорость вращения даже при высоких нагрузках. Такие электродвигатели для запуска требуют меньший пусковой ток, а конструкция позволяет использовать автоматические пусковые устройства. Кроме того, эти электрические машины хорошо переносят продолжительные перегрузки. Как и любой электрический механизм, электродвигатели с фазным ротором имеют ряд недостатков: · чувствительность к перепадам напряжения; · большие габаритные размеры · высокая стоимость;; · более сложная конструкция за счет цепи ротора с добавочным сопротивлением; · меньшие показатели коэффициента мощности и КПД (относительно АД с короткозамкнутым ротором). Система плавного разгона электродвигателя с фазным ротором работает автоматически. Оператор нажимает кнопку «Пуск», дальше автоматика все делает сама (рис.9.14). Главный контактор подключает к трехфазному напряжению обмотку статора. Двигатель начинает вращение с минимально возможной скоростью, так как в цепь его ротора включены резисторы с максимально возможным сопротивлением. Через фиксированную задержку, формируемую реле времени, включается первый контактор, шунтирующий первую секцию сопротивлений в цепи ротора. Скорость вращения немного возрастает. Проходит еще время, второе реле времени запускает следующий контактор. Шунтируется следующая секция сопротивлений, ток в цепи ротора возрастает, скорость вращения – увеличивается. И так далее, до полного исключения всех сопротивлений из цепи ротора. При этом электродвигатель выходит на номинальные обороты.
Рис.9.14
Число ступеней разгона выбирается из условий тяжести запуска. Разгон получается не таким уж плавным, ток в статоре возрастает ступенями. При старте и переходе на каждую последующую ступень, электродвигатель все равно потребляет пусковой ток, хоть и меньшего значения. Этого недостатка лишены электродвигатели, для разгона которых используются жидкостные пускатели (или стартеры). В них в качестве резистора используется жидкость с высоким удельным сопротивлением. Это – дистиллированная вода с растворенной в ней специальной солью. Уменьшение сопротивления достигается за счет уменьшения расстояния между электродами, помещенными в эту жидкость. Электроды приводятся в движение небольшим электродвигателем через червячную передачу. За счет этого уменьшение сопротивления в цепи ротора и разгон электродвигателя происходят плавно. Для каждой ступени реостатного пуска асинхронного двигателя с фазным ротором изменяется его механическая характеристика. Эти изменения показаны ниже. Лебедок и конвейеров Для примера рассмотрим управление асинхронным электродвигателем с фазным ротором башенного крана. Электрическая схема системы управления показана на рис. 9.15.
Рис.9. 15 Схема управления двигателем башенного крана: 0,1,2,3, 4 – позиции контроллера: КМ1…КМ10 – электромагнитные катушки управления, аналогично обозначены контакты соответствующих электромагнитов; КТ1и КТ2 – кнопки аварийного отключения; УВ – устройство включения системы; SQ1, SQ2 – тепловые реле. Если при плавном запуске электродвигателя с фазным ротором управление переключением сопротивлений происходит автоматически, то на кране этим управляет оператор – крановщик. Для этого в его кабине размещаются органы управления – контроллеры (на старых кранах) или джойстики (на современных). Они имеют два направления движения: «вперед-назад», «влево-вправо» или «вверх-вниз», в зависимости от назначения контроллера (управление мостом, тележкой или подъемом груза соответственно). В каждом из направлений рукоятка управления проходит ряд фиксированных положений. Чем дальше положение от рукоятки от средней точки, в которой привод выключен, тем больше скорость вращения электромотора. И тем быстрее происходит перемещение механизма или подъем (опускание) груз. При изменении направления перемещения рукоятки управления изменяется направление вращения электродвигателя. Это происходит за счет переключения чередования фаз питания обмотки статора. Для этого две фазы меняются местами. Происходит это путем подачи напряжения на обмотку реверсивными контакторами, состоящих из двух элементов: контактора «Вперед» и контактора «Назад». При переключении скоростей другими контакторами из цепи обмотки ротора удаляется часть резисторов. Первое положение рукоятки управления всегда включает электродвигатель с полным набором сопротивлений в цепи ротора. Крайнее положение рукоятки шунтирует все сопротивления. Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включается регулятор напряжения. При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент Мкр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет, а скольжение от U рег не зависит. Широко используется регулирование скорости АД с фазным ротором включением в цепь ротора активных сопротивлений (резисторов). Как при этом изменяются механические характеристики двигателя видно из рис. А. Этот способ используется также для плавного запуска АД с фазным ротором. В начале пуска вводится в цепь ротора максимальное сопротивление, затем по мере пуска величина сопротивления убывает (как правило – ступенчато), в конце процесса сопротивление становится равным нулю и двигатель выходит на естественную механическую характеристику.
Рис. А. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь
Рис.9.16 Общий вид безредукторного привода лифта
Рис. 9.17 Общий вид механической части лифта
При большом разнообразии вариантов конструкций пассажирских и грузовых лифтов основными узлами оборудования для них являются подъемная лебедка, канаты, кабина, противовес, механический тормоз и аппаратура управления. Современные лифты имеют систему подвеса с противовесом и с уравновешивающим канатом.
Кабина перемещается вдоль вертикальных направляющих. Кабина подвешена к канатам, огибающим канатоведущий и направляющий шкивы приводной электрической лебедки. На концах каната укреплен противовес, движущийся по направляющим. Масса противовеса равна сумме массы кабины и (0,42 - 0,5) массы груза (или половине наиболее вероятной нагрузки кабины.
Электроприводы лифтов В лифтах и грузовых подъемниках типы электроприводов выбираются в зависимости от скорости движения, этажности здания и требуемой точности остановки. В настоящее время применяют следующие электроприводы: а) для зданий до 17 этажей используются тихоходные и быстроходные лифты со скоростью от 0,7 до 1,4 м/с грузоподъемностью 320, 400кг. В этих лифтах применяют электропривод с асинхронным двухскоростным электродвигателем с короткозамкнутым ротором, б) для быстроходных пассажирских лифтов со скоростью 1,6 м/с предназначенных для зданий до 25 этажей применяют электропривод по системе тиристорный регулятор напряжения (ТРН) с двухскоростным асинхронным двигателем (ТРН-АДД).
Рис.9.18 Общий вид привода лифта с редуктором. Наличие регулируемого электропривода обеспечивает высокую плавность процессов разгона и замедления, высокую точность остановки на этаже (до 20 мм), отсутствие участка пониженной скорости перед остановкой. Вторая обмотка двигателя служит для получения малой скорости при ревизии, в) для скоростных и высокоскоростных лифтов применяются электроприводы постоянного тока по системе тиристорный преобразователь-двигатель ТП-Д и переменного тока по системе преобразователь частоты - короткозамкнутый асинхронный электродвигатель ГГЧ-АД. Рис. 9.19. Схема тиристорного электропривода лифта
Тормозные электромагниты Грузоподъемные механизмы лифтов снабжаются специальными тормозными устройствами с длинноходовыми и короткоходовыми электромагнитами постоянного тока, которые подключаются к сети напряжением 220 или 380 В через выпрямитель. Аппараты управления лифтов Этажные переключатели предназначены для коммутации цепей управление движением. Они регистрируют положение кабины, автоматически выбирают направление движения ("верх" или "низ") и дают команду на отключение электропривода при остановке. Конструктивно это трехпознцнонные рычажные переключатели (путевые командоаппараты) на три положения (1-0-2), имеющие подвижные (на рычаге) к неподвижные (на корпусе) контакты. Этажные переключатели устанавливаются в шахте на уровне этажа, а на кабине — фасонная отводка, которая действует на рычаг этажного переключателя. При ходе кабины "вверх" поворотом рычага замыкается одна группа неподвижных контактов, а "вниз"— другая. Когда кабина находится на уровне этажа, этажный переключатель находится в нейтральном положении "О", а неподвижные контакты разомкнуты.
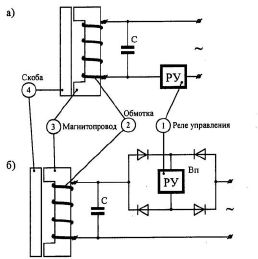
Переключатели скорости предназначены для подачи импульса на снижение скорости перед остановкой кабины. Применяются в быстроходных лифта с электроприводом двухскоростного исполнения. Они построены по принципу действия этажных переключателей, но конструктивный вид имеют другой. Переключатели скорости устанавливаются в стволе шахты комплектно выше и ниже этажа на расстоянии от 0,5 до 0,6 м. Рычажные переключатели предназначены для управлении грузовыми лифтами с проводником. Конструктивно это трехпозицнонные рычажные переключатели с самовозвратом рукоятки в нейтральнее положение ("верх"-0-"низ"), установленные в кабине. Поворотом рукоятки выбирается направлен не движения, что достигается замыканием пары неподвижных контактов. При отпускании рукоятки контакты размыкаются и двигатель останавливается (отключается). Рычажные переключатели одновременно используется как конечный выключатель в крайних положениях кабины. Это достигается действием на ролик рычага специальных направляющих в стволе шахты. Индуктивные датчики предназначены для применения в быстроходных лифтах. Схема таких датчиков на переменном и выпрямленном токе показана на рис. 2. В стволе шахты устанавливается П-образный шихтованный магнитопровод из стали 3, а на кабине стальная скоба 4 представляющая собой магнитный шунт. На магнитопроводе находится катушка с обмоткой 2 к которой подключается реле управления 1 непосредственно или через выпрямитель ВП. При уходе скобы (магнитопровод размыкается) индуктивное сопротивление катушки мало, что обеспечит срабатывание реле управления. Если стальная скоба перекрывает магнитопровод, резко возрастает индуктивное сопротивление катушки и реле отпускает. Надежность и четкость срабатывания реле управления обеспечена включением емкости С параллельно катушке, которая выбирается из условия получения близкого к резонансу токов режима. Применение выпрямителя для питания реле управления повышает надежность срабатывания магнитной системы реле. Кроме того, в путевых датчиках нашли широкое применение устройства с герметичными контактами (герконы). Применение индуктивных датчиков устраняет такие недостатки этажных переключателей и переключателей скорости, как шумность и радиопомехи, возникающие при работа контактных устройств.
Рис. 9.20. Принципиальная электрическая схема индуктивных датчиков на переменном (а) и выпрямленном (б) токе Магнитная отводка - это электромагнитное устройство, устанавливаемое на кабине и контролирующее работу замков дверей шахты. Упор магнитной отводки соединен с якорем электромагнита отводки. При нахождении кабины на этаже электромагнит отводки обесточен, упор под действием пружины отводит защелку замка двери шахты, позволяя ее открыть. При движении электромагнит отводки под питанием — защелка введена, что запрещает открытие двери. Такие защелки применяются в лифтах старой конструкции (или модернизированных) с ручным приводом дверей шахты.
Автоматика лифтов Основным отличием работы лифтов и подъемников является их многопозиционность, выражающаяся в том, что механизмы могут занимать большое число фиксированных положений. Поэтому после каждой остановки приходится решать логическую задачу о выборе последующего перемещения. Решение этой задач в настоящее время осуществляется с помощью логических микросхем и микропроцессоров. Перед схемой управления лифтами ставятся следующие задачи: контроль положения кабины в шахте, автоматический выбор направления движения, определение времени начала торможения, точной остановки кабины на этаже, автоматического открывания и закрывания дверей и защиты электроприводов и лифта. Командные сигналы, задающие программу движения кабины, разделяются на два типа: "приказы", поступающие из кабины, и "вызовы", поступающие с этажных площадок. Команды подаются кнопками, расположенными соответственно в кабине и на этажных площадках. В зависимости от реакции на команды и способы их отработки различаются схемы раздельного и собирательного управления. При раздельном принципе управления схема воспринимает и отрабатывает только одну команду и во время ее выполнения не реагирует на другие приказы и вызовы. Такая схема наиболее проста в реализации, но ограничивает возможную производительность лифта и поэтому применяется лишь для лифтов жилых домов высотой до девяти этажей с относительно небольшим потоком пассажиров. При собирательном принципе управления схема воспринимает одновременно несколько команд и выполняет их в определенной очередности, обычно в порядке следования этажей.
Рис. 9.22 Шкаф автоматики лифтовой установки Основой системы управления лифтами является поэтажный тактовый опрос. Тактовый опрос может быть маятниковым, когда опрос производится в двух направлениях, снизу вверх и сверху вниз и одного направления, например, только сверху вниз. Чаще применяется маятниковый опрос 3.2.4.4 Работа частотно-регулируемого электропривода лифтовых установок. Состав элементов частотно-регулируемого электропривода, их работа и назначение показаны на схеме. Из питающей сети (1) переменное напряжение промышленной частоты (~ U, = f) поступает на вход выпрямителя (2). Для сглаживания пульсаций выпрямленного напряжения (±U) на выходе выпрямителя устанавливается фильтр (3). И уже постоянное (= U) (сглаженное) напряжение подаётся на вход управляемого импульсного инвертора тока (4). Электронные ключи инвертора по сигналам системы управления (8) открываются и запираются таким образом, что формируемые при этом различные по длительности импульсы тока складываются в результирующую кривую синусоидальной формы с необходимой частотой. Для сглаживания пульсаций, на выходе инвертора может устанавливаться дополнительный высокочастотный фильтр (5). Затем напряжение подаётся на обмотки электродвигателя (М), который является приводом механизма технологической системы (6).
Рис. 9.23 Состав элементов и функциональные взаимосвязи частотно-регулируемого электропривода (ЧРП), их работа и назначение: 1- питающая сеть; 2- выпрямитель; 3 – фильтр; 4 – управляемый импульсный инвертор; 5 – высокочастотный фильтр; 6 – привод механизма технологической системы; 7 – измерительный датчик; 8 – внутренняя система управления ЧРП; 9 – сигнал от внешней системы управления ЧРП
Для самоконтроля и защиты система управления собирает и обрабатывает сигналы о наличии или величине ряда параметров, характеризующих работу собственных подсистем. Контролируются токи и напряжения на входе, выходе из преобразователя и в магистрали постоянного тока. Измеряется температура элементов и регулируется производительность системы охлаждения преобразователя. Контролируется состояние отдельных элементов вплоть до отдельного ключа. При наличии специального датчика в корпусе электродвигателя измеряется, а при отсутствии датчика рассчитывается по электрическим характеристикам потребляемой двигателем энергии температура двигателя. Таковы общие принципы частотного регулирования электроприводов. Конкретные схемные решения в зависимости от условий различны, различаются и принципы управления частотно-регулируемым электроприводом. Как и большинство технических решений такого рода, частотное регулирование электроприводов имеет свои недостатки и ограничения.
Контрольные вопросы к теме 3.2 1. Классификация электродвигателей постоянного и переменного тока. 2. Униполярный синхронный генератор. 3. Конструкция синхронной машины. 4. Принцип работы и ЭДС синхронного генератора. 5. Общие сведения и конструкция асинхронного трехфазного двигателя. 6. Устройство и принцип действия трехфазного АД с короткозамкнутым ротором. 7. Что такое скольжение ротора асинхронного двигателя, как оно определяется. 8. Принципиальная схема ротора асинхронного двигателя с фазным ротором. 9. Реостатный пуск асинхронного двигателя с фазным ротором 10. Недостатки электродвигатели с фазным ротором. 11. Механическая характеристика асинхронного двигателя с короткозамкнутым ротором. 12. Основные параметры механической характеристики АД. 13. Аварийные режимы работы электродвигателей. 14. Виды защиты асинхронных электродвигателей. 15. Асинхронный электропривод башенных кранов, подъемников. 16. Электропривод лифтов: общие сведения и классификация. 17. Управление приводом и защита привода лифтов. 18. Тиристорный электропривод лифта типа УЛМП-25-16. 19. Работа частотно-регулируемого электропривода лифтовых установок.
План лекции 3.2.1 Машины переменного тока: общин сведения и классификация электродвигателей переменного тока 3.2.2 Асинхронные машины: принцип действия, устройство, параметры и основные характеристики 3.2.3Асинхронные двигатели с фазным ротором, их управление и защита. 3.2.4 Асинхронные двигатели в строительных машинах 3.2.4.1 Асинхронный электропривод башенных кранов, подъемников, лебедок и конвейеров 3.2.4.2 Электропривод лифтов: общие сведения и классификация. 3.2.4.3 Управление приводом и защита привода лифтов. 3.2.4.4 Работа частотно-регулируемого электропривода лифтовых установок.
Машины переменного тока: общин сведения и классификация электродвигателей переменного тока Общее представление о классификации и разновидностях электродвигателей дает рисунок 9.1.
Рис. 9.1 Классификация электродвигателей К этой структурной схеме нужны некоторые пояснения.Униполярный генератор (рис. 9.1) — разновидность электрической машины постоянного тока. Впервые изобретен Фарадеем. Содержит проводящий диск, постоянное магнитное поле, параллельное оси вращения диска, 1 токосъёмник на оси диска и 2-й токосъёмник у края диска.
Рис.9.1 Униполярный генератор Фарадея Униполярные генераторы используются для получения постоянных токов большой мощности. Для промышленных целей униполярные двигатели применяются редко. Синхронно-реактивная машина независимого возбуждения использует привычный ротор и статор. Магнитное поле в статоре вырабатывает энергию, которая поступает на обмотку ротора, создавая индукцию тока и крутящий момент, приводящий ротор в движение. Предполагается использовать синхронно-реактивный двигатель на отечественном электромобиле.. Двигатели постоянного тока мы рассматривали на предыдущей лекции. В промышленном масштабе применяются синхронные и асинхронные электромашины, причем синхронные машины используются в основном в качестве генераторов, а асинхронные – в качестве двигателей. Синхронными электрические машины называют потому, что скорость вращения ротора строго совпадает со скоростью магнитного поля статора. У асинхронных машин в двигательном режиме скорость ротора отстает от скорости вращения магнитного поля статора. Разность угловых скоростей называется скольжением. Несколько слов об устройстве и принципе действия синхронной машины. Устройство. Она состоя
|
|||||||||
|
|
Последнее изменение этой страницы: 2020-12-17; просмотров: 400; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.21.233.41 (0.143 с.) |
 тор с неявно выраженными полюсами. Он состоит (рис. 9.4) из сердечника 1 и обмотки возбуждения 2. Сердечник изготовляется из стальной поковки цилиндрической формы. На его внешней поверхности фрезеруются пазы, в которые закладывается обмотка возбуждения.
тор с неявно выраженными полюсами. Он состоит (рис. 9.4) из сердечника 1 и обмотки возбуждения 2. Сердечник изготовляется из стальной поковки цилиндрической формы. На его внешней поверхности фрезеруются пазы, в которые закладывается обмотка возбуждения. , где B – магнитная индукция в воздушном зазоре между статором и ротором; l – активная длина проводника;
, где B – магнитная индукция в воздушном зазоре между статором и ротором; l – активная длина проводника;  – линейная скорость пересечения проводников магнитным полем.
– линейная скорость пересечения проводников магнитным полем.
 Bm lvsin α = Bm lvsin (ω t)
Bm lvsin α = Bm lvsin (ω t) fω Ф0 m
fω Ф0 m статора; p — число пар полюсов; Ф0 m – максимальный магнитный поток полюса ротора; n0 – синхронная частота вращения.
статора; p — число пар полюсов; Ф0 m – максимальный магнитный поток полюса ротора; n0 – синхронная частота вращения. ).
).
 и момента Мн, а также критического момента
и момента Мн, а также критического момента  . Затем из приведенного выше соотношения находят критическое скольжение SK.
. Затем из приведенного выше соотношения находят критическое скольжение SK. ;
; 



 В зависимости от скорости движения кабины лифты подразделяют на тихоходные (до 0,71 м/с), быстроходные (от 1 до 1,6 м/с), скоростные (от 2 до 4 м/с) и высокоскоростные (4 – 10 м/с). Грузоподъемность пассажирских лифтов составляет от 320 до 1600кг, грузовых - от 160-5000 кг. При скорости до 1,6 м/с электродвигатель соединяется с канатоведущим шкивом через редуктор, если скорость выше, то применяют безредукторные электроприводы (рис. 9.16).
В зависимости от скорости движения кабины лифты подразделяют на тихоходные (до 0,71 м/с), быстроходные (от 1 до 1,6 м/с), скоростные (от 2 до 4 м/с) и высокоскоростные (4 – 10 м/с). Грузоподъемность пассажирских лифтов составляет от 320 до 1600кг, грузовых - от 160-5000 кг. При скорости до 1,6 м/с электродвигатель соединяется с канатоведущим шкивом через редуктор, если скорость выше, то применяют безредукторные электроприводы (рис. 9.16).


 Подлежащий регулированию параметр технологической системы измеряется датчиком (7), управляющий сигнал, от которого подаётся в систему управления ЧРП (8). Либо внешняя система управления (9) собирает информацию о многих параметрах, характеризующих работу технологической системы, обрабатывает её и подаёт результирующий сигнал в систему управления приводом. В зависимости от величины, иногда скорости изменения этого сигнала, и программных установок, микропроцессорная система управления ЧРП формирует и подаёт управляющие импульсы на электронные ключи выпрямителя и инвертора.
Подлежащий регулированию параметр технологической системы измеряется датчиком (7), управляющий сигнал, от которого подаётся в систему управления ЧРП (8). Либо внешняя система управления (9) собирает информацию о многих параметрах, характеризующих работу технологической системы, обрабатывает её и подаёт результирующий сигнал в систему управления приводом. В зависимости от величины, иногда скорости изменения этого сигнала, и программных установок, микропроцессорная система управления ЧРП формирует и подаёт управляющие импульсы на электронные ключи выпрямителя и инвертора.


