Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
III. Определение девиации по пеленгам отдаленного предмета.
Если акватория стеснена для маневрирования, то для покладки судна на каждый из 8 компасных курсов используется обеспечивающий буксир.
где ИП и d – с карты.
IV. Определение девиации по пеленгам небесного светила. На каждом из 8 компасных курсов производится замер компасного пеленга светила, имеющего высоту над горизонтом не > 15°. По специальной методике с использованием МАЕ, ВАС (ТВА) рассчитываются счислимые азимуты светила (Ас) для каждого замера пеленга.
V. Определение девиации способом «взаимных пеленгов». На берегу, где известно магнитное склонение d, устанавливается магнитный компас. По сигналу одновременно берут пеленг на береговой компас с судна, и наоборот.
Стрелка компаса на берегу находится в плоскости магнитного меридиана. При необходимости в хорошую погоду этот способ можно использовать и в открытом море, где роль «берегового» компаса может выполнить компас, установленный на деревянной шлюпке.
VI. Определение девиации по сличению показаний двух компасов Способ используется для определения девиации путевых компасов. На каждом из 8 компасных курсов по сигналу «Ноль» снимаются показания курса и на главном (1-й наблюдатель) и на путевом (2-й наблюдатель) компасах. Девиация путевого компаса вычисляется по формуле:
Вместо главного магнитного компаса (если его нет) можно использовать гирокомпас, тогда:
Таблица девиации составляется для значений компасных курсов через каждые 10°.
ЛР-4 Расчет направлений относительно истинного меридиана и ДП судна. Системы счета направлений Круговая система счета Круговая система счета направлений является основной системой счета. В этой системе горизонт делится на 360° (рис. 2.3) и счет направлений ведется от 0° до 360° от северной части истинного меридиана наблюдателя N И вправо по ходу часовой стрелки.
Рис. 2.3. Круговая система счета направлений Наблюдатель (т. А) – в центре. Тогда направления:
Если при расчете направлений получится значение более 360° (390°), то от результата следует вычесть 360° (т.е. один оборот 390° – 360° = 30°). Круговая система счета направлений применяется в судовождении для определения направления движения судна (курс) и определения направления с судна на береговые ориентиры, соседние суда и пр. (пеленг).
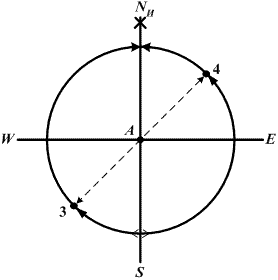
Полукруговая система счета
Рис. 2.4. Полукруговая система счета направлений В полукруговой системе счета (рис. 2.4) счет направлений ведется от северной или южной части истинного меридиана наблюдателя в сторону востока Е или запада W в пределах от 0° до 180°. Для исключения многозначности в полукруговой системе счета числовому значению направления дается наименование. Например: т.1 N 45° E; т.2 N 105° W (рис. 2.4 а). т.3 S 45° W; т.4 S 135° E (рис. 2.4 б). Первая буква наименования – от какой части ИМН (N или S) идет счет. Вторая буква наименования – в каком направлении идет счет (к Е или к W). Полукруговая система счета обычно применяется в мореходной астрономии.
Правила перехода от полукруговой системы счета направлений в круговую:
Четвертная система счета
Рис. 2.5. Четвертая система счета направлений В четвертной системе счета направлений (рис. 2.5) счет направлений ведется от северной (N) и южной (S) части ИМН в сторону востока (Е) и в сторону запада (W) в пределах от 0° до 90°. В данной системе счета числовому значению направления дается наименование, соответствующее наименованию четверти. Например:
т.1 10° NE; т.2 10° SE; т.3 30° SW; т.4 70° NW. Четвертная система счета направлений также будет нам встречаться при решении задач мореходной астрономии.
Переход от четвертной системы счета к круговой аналогичен изложенному в п. Б, т.е.:
Румбовая система счета Была основной системой счета направлений во времена парусного флота. Всего 32 румба -направления. 1 румб = 11 1/4 ° (111/4° · 32 = 360°). Румбы в градусной мере
|
||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-03-26; просмотров: 293; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.217.8.82 (0.008 с.) |