
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение расстояний видимостиСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Расчетное расстояние видимости на проектируемой дороге определяется, исходя из трех «схем видимости». С х е м а 1. Остановка автомобиля перед препятствием (расстояние видимости поверхности дороги). Расчет выполняется для горизонтального участка дороги:
 (16) (16)
где V р – расчетная скорость движения наиболее скоростного автомобиля, км/ч; K э – коэффициент, учитывающий эффективность действия тормозов (1,3 – для легковых автомобилей; 1,85 – для грузовых автомобилей, автобусов и автопоездов); φ1 – коэффициент продольного сцепления при торможении на чистых покрытиях (φ1 = 0,50); l з.б – зазор безопасности (l з.б = 5 … 10 м).
(Л) S1 =
(Г) S1 =
(Л)
(Г)
где L 1 – путь, который пройдет легковой автомобиль, когда нагонит грузовой автомобиль и поравняется с ним, м:
(Л)
 – расстояние между легковым и грузовым автомобилями в момент начала заезда на полосу встречного движения; – расстояние между легковым и грузовым автомобилями в момент начала заезда на полосу встречного движения;
(Л) где
(Л)
L 3 – путь, который проходит встречный автомобиль за период обгона, м
(Л)
где V п – скорость бегущего пешехода, км/ч (V п = 10 км/ч); V а – скорость движения автомобиля, км/ч (V а = 60 км/ч); S 1 – расчетное расстояние видимости, определенное из условия остановки перед препятствием, м.
(Л)
(Г)
3.6. Определение минимальных радиусов кривых в плане
Наименьший радиус кривых в плане определяется по формуле
где V р – расчетная скорость движения автомобиля, км/ч; μ – коэффициент поперечной силы; i п.ч – поперечный уклон проезжей части, доли единиц.
При определении радиусов кривых в плане считается, что автомобиль движется по слегка увлажненному чистому покрытию и в этом случае μ = φ2, где φ2 – коэффициент поперечного сцепления.
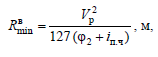
Радиус кривой в плане без виража определяется для движения автомобиля по наружной относительно центра кривойполосе движения по формуле
где φ2 = 0,05 … 0,10; i п.ч– принимается по [11, табл. 7] в зависимости от категории дороги, дорожно-климатической зоны итипа покрытия дорожной одежды.
Таблица 12 - Поперечные уклоны проезжей части (кроме участков кривых в плане, на которых предусматривается устройство виражей)
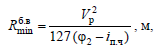
Радиус кривой в плане с виражом определяется по формуле
где φ2 = 0,15 … 0,20; i п.ч – принимается потабл. 13 в зависимости от категории дороги и радиуса кривой в плане.
Примечание: Меньше значения поперечных уклонов на виражах соответствуют большим радиусам кривых, а больше - меньшим. Если две соседние кривые в плане, обращенные в одну сторону, расположены близко одна от другой и прямая вставка между ними отсутствует или длина ее незначительна, односкатный поперечный профиль следует принимать непрерывным на всем протяжении. В районах с незначительной продолжительностью снегового покрова и редкими случаями гололеда наибольший поперечный уклон проезжей части на виражах допускается принимать до 100 ‰. На особо трудных участках по условиям застройки или рельефа местности допускается разработка индивидуальных проектов виражей с переменными поперечными уклонами (типа «ступенчатый вираж») и уширенной проезжей частью дорог.
Длина отгона виража определяется по формуле
где b п.ч– ширина проезжей части, м; i в – поперечный уклон виража, принимается потабл. 13; i з – дополнительный уклон,возникающий при подъеме наружной кромки проезжей части над проектным уклоном (5% – для дорог I и II категорий; 10% – для дорог III-IV категорий в равнинной местности и 20% – в горной местности).
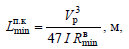
Виражи на многополосных дорогах I категории, как правило, следует проектировать с раздельными поперечными уклонами для проезжих частей разных направлений и необходимыми мероприятиями по отводу воды с проезжих частей и разделительной полосы. Поперечный уклон обочин на вираже следует принимать одинаковым с уклоном проезжей части дороги. Переход от нормального уклона обочин при двускатном профиле к уклону проезжей части следует производить, как правило, на протяжении 10 м до начала отгона виража. Минимальная длина переходной кривой определяется по формуле
где V р – расчетная скорость движения автомобиля, км/ч; I – нарастание центробежного ускорения при движении автомобиля на участке переходной кривой (I = 0,5 м/с3); R min – минимальный радиус кривой в плане с виражом, м.
Радиус, при котором видимость поверхности проезжей части будет соответствовать расчетному расстоянию видимости в ночное время, определяется по формуле
где S 1 – расстояние видимости поверхности дороги, м (п. 3.5); α – угол рассеивания пучка света фар, градусы (α = 2°).
(Г)
Все рассчитанные значения радиусов кривых в плане сводятся в табл. 14.
Таблица 14. Минимальные радиусы кривых в плане
Кривые в продольном профиле
Минимальный радиус вертикальной выпуклой кривой определяется из условия обеспечения видимости поверхности дорожного покрытия:
 (25) (25)
где S 1 – расстояние видимости поверхности дороги, м (см. п. 3.5); d – высота глаз водителя легкового автомобиля над поверхностью дороги (d = 1,2 м). Минимальный радиус вертикальной вогнутой кривой определяется из условия обеспечения видимости поверхностипроезжей части дороги в ночное время при свете фар:
где S 1 – то же, что и в формуле (3.25); h ф – высота света фар легкового автомобиля над поверхностью проезжей части (h ф =0,75 м); α – то же, что и в формуле (3.24). Радиус вертикальной вогнутой кривой из условия ограничения центробежной силы (за критерий принимается самочувствие пассажиров и перегрузка рессор):
где V р – расчетная скорость легкового автомобиля, км/ч.
Результаты расчетов сводятся в табл. 15.
Таблица 15. Минимальные радиусы вертикальных кривых
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2019-04-27; просмотров: 548; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.73 (0.01 с.) |

 +
+  +5=16,15м
+5=16,15м +5=18,3м
+5=18,3м (17)
(17) = 2(
= 2( )+5=27,3м
)+5=27,3м )+5=31,6м
)+5=31,6м =75+5=80
=75+5=80 = L 1 + L 2 + L 3, м, (18)
= L 1 + L 2 + L 3, м, (18)
 =
=  (6,71+7)=216,618 м
(6,71+7)=216,618 м =22.2+
=22.2+  =6,71м
=6,71м – расстояние, которое пройдет легковой автомобиль за время принятия решения водителем об обгоне;
– расстояние, которое пройдет легковой автомобиль за время принятия решения водителем об обгоне; =
= 
 =
=  (9.42+7)=260,257м
(9.42+7)=260,257м – расстояние, на котором легковой автомобиль должен возвратиться на свою полосу движения;
– расстояние, на котором легковой автомобиль должен возвратиться на свою полосу движения; =
=  +5=9.42
+5=9.42
 =
=  =476,875м
=476,875м
 =
=  0.03=5м
0.03=5м 0.03=5м
0.03=5м , м
, м
 , м
, м
 , м
, м
 , м
, м
 (19)
(19)
 (20)
(20)
 (21)
(21)
 (22)
(22)
 (23)
(23)
 (24)
(24)


 , м
, м
 , м
, м
 ,м
,м
 ,м
,м
 (26)
(26) (27)
(27)



