Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Полупроводниковые термометры (терморезисторы, термисторы)
Наряду с термопреобразователями сопротивления из металлических проводников для измерения температуры применяются полупроводниковые термометры сопротивления – терморезисторы. Терморезисторы изготавливаются из порошкообразной смеси окислов некоторых металлов: меди (Cu2O3), марганца (Mn2O3), кобальта (СоО), никеля (NiО) и др., спрессованной и спеченной при высокой температуре. Терморезисторы, представляющие непроволочные объемные нелинейные резисторы различной формы (цилиндрические, шайбовые и др.), в отличие от металлических резисторов имеют отрицательный температурный коэффициент, т.е. при нагревании уменьшают свое сопротивление. Температурная зависимость сопротивления полупроводникового ТС описывается уравнением:
где
Терморезисторы имеют значительное удельное электрическое сопротивление, что позволяет получать из них компактные и малоинерционные термометры с большим сопротивлением (1 – 1000 кОм) и, следовательно, не учитывать влияние изменений температуры окружающего воздуха на сопротивление линий, соединяющих термометры со вторичными приборами. Терморезисторы обладают большим постоянством электрических свойств, однако степень воспроизведения их сопротивления недостаточно надежна. Отклонение сопротивления от номинального значения достигает ±20%, что не обеспечивает необходимой взаимозаменяемости. Полупроводниковые ТС с положительным ТКС (позисторы) изготавливаются из полупроводниковых поликристаллических керамик (например, Ba, TiO3) и обладают ферроэлектрическими свойствами, которые характеризуются тем, что сопротивление в относительно узком температурном диапазоне возрастает экспоненциально на несколько порядков. Шаговые ИМ. Шаговые исполнительные двигатели. Шаговым двигателем называется электродвигатель с прерывистым вращением ротора под действием дискретного электрического сигнала, подаваемого на обмотки управления. в качестве шаговых двигателей получили широкое распространение многофазные синхронные двигатели с активным (возбуждением) и реактивным (невозбужденным) ротором
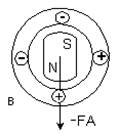
Шаговые двигатели (ШД) отличаются от обычного синхронного в основном формой напряжения, подводимого к фазным (управляющим) обмоткам. ШД применяются с электронным коммутатором, который подает на обмотки управления прямоугольные импульсы. Последовательность подключения обмоток и частота импульсов соответствует заданной команде. каждому импульсу управления соответствует поворот ротора на фиксированный угол, называемый шагом двигателя, величина которого строго определена его конструкцией и способом переключения обмоток. скорость вращения пропорциональна частоте, а суммарный угол поворота - числу импульсов управления. При изменении последовательности подключения к обмоткам управляющих импульсов по произвольному закону шаговый двигатель работает в режиме слежения, воспроизводя сложное движение с точность до одного шага. ШД совместно с коммутатором можно отнести к системам частотного регулирования синхронного электродвигателя с возможностью изменения частоты до нуля. При снятии управляющих импульсов шаговый двигатель фиксирует конечные координаты углового перемещения с точностью до долей шага без применения датчиков обратной связи, что упрощает систему управления. Рассмотрим принцип действия и особенности основных физических процессов шаговых двигателей на примере двухфазной двухполюсной синхронной машины с активным ротором. При подаче постоянного напряжения указанного знака на фазу А возникает намагничивающая сила статора FА, которая в результате взаимодействия с полем постоянного магнита ротора создает синхронизирующий момент. Под действием этого момента ротор займет положение, при котором его ось совпадет с осью фазы А. При отключении фазы А и подключении фазы В вектор намагничивающей силы статора повернется на 90° по часовой стрелке, возникнет синхронизирующий момент, под действием которого ротор вновь повернется на 90°. Для следующего поворота ротора на 90° по часовой стрелке необходимо подать на фазу А напряжение противоположного знака и т. д.
-При рассмотренном способе переключения обмоток, который можно представить в виде последовательности +А, +В, -А, -В, шаг двигателя равен 90°. Шаг двигателя можно уменьшить в два раза, если переключение обмоток выполнить в другой последовательности: (+А), (+А, +В), (+В), (+В, -А), (-А), (-А, -В), (-В), (-В, +А), т. е. на некоторых шагах происходит подключение двух фаз одновременно. Такая коммутация фаз уменьшает шаг до 45°. -Управление шаговым двигателем может быть однополярным или pазнополяpным, симметричным или несимметричным, потенциальным или импульсным. -При однополярном управлении напряжение, подводимое к фазе, изменяется только по величине от нуля до +U. -Разнополярное управление предполагает изменение напряжения от -U до +U. -Управление называется симметричным, если для каждого устойчивого состояния возбуждается одинаковое количество фаз. -Если возбуждается разное число обмоток, то управление будет несимметричным. В рассмотренном примере шагового двигателя управление является разнополярным симметричным при шаге 90° и несимметричным при шаге 45°. -При потенциальном управлении напряжение на обмотках изменяется только в моменты поступления управляющих импульсов. В отсутствие сигнала управления обмотки находятся под постоянным напряжением, которое фиксирует положение ротора. -При импульсном управлении обмотки статора находятся под напряжением только в моменты поворота ротора, а затем напряжение снимается и ротор фиксируется в определенном положении реактивным моментом. -Способ управления шаговым двигателем оказывает влияние на сложность электронного коммутатора. Для простоты схемы электронного коммутатора наиболее удобной является потенциальная схема управления с симметричной однополярной коммутацией обмоток. Характеристики шагового двигателя. . Число устойчивых электрических состояний n, которое кратно или равно числу управляющих обмоток m. Так n = m используется при однополярной коммутации и симметричном способе управления. n = 2*m при разнополярной коммутации с симметричным управлением или при однополярной коммутации для несимметричного способа управления. n = 4*m для несимметричной разнополярной коммутации. 2. Механический шаг двигателя - угол между двумя устойчивыми соседними состояниями a = 2 p/ (n p), где: n - число устойчивых состояний; р - число пар полюсов ротора. Этот же угол в электрических градусах будет равен aэ = a×p =2 p / (n×p). . Синхронизирующий момент – зависимость момента, развиваемого двигателем, от углового положения ротора. Для шаговых двигателей с симметричным ротором эта функция близка к синусоиде. 4. Пусковой момент – максимальный момент нагрузки, при котором двигатель на очередном цикле коммутации вращается без потери шага. Этот момент равен ординате точки пересечения кривых синхронизирующего момента для двух устойчивых соседних состояний. 5. Интервал значений углового положения ротора, в пределах которого ротор возвращается в исходное положение, является зоной статической устойчивости двигателя. Эта зона равна (-p)...(p) для двигателя с симметричным ротором. 6. Частота приемистости fn – максимальная частота следования импульсов управления, при которой двигатель входит в синхронизм без потери шага. Частота приемистости пропорциональна динамической добротности шагового двигателя, определяемой отношением - Mп /J, и обратно пропорциональна шагу двигателя. При одной и той же добротности и величине шага частота приемистости растет с увеличением числа обмоток управления.
Это объясняется тем, что при пуске ротор за первые тактовые импульсы может отрабатывать не полные шаги, а вращаться с некоторым запаздыванием относительно магнитодвижущей силы статора, оставаясь в пределах зоны устойчивости при каждом очередном переключении обмоток управления. Частота приемистости зависит от момента нагрузки на валу и электромагнитной постоянной времени обмоток управления. 7. Электромагнитная постоянная времени – отношение индуктивного сопротивления обмотки управления к ее активному сопротивлению. 8. Собственная частота колебаний wо - угловая частота колебаний ротора двигателя около устойчивого положения при отсутствии момента нагрузки. Знание wо необходимо при определении частоты управляющих импульсов, при которой возможно явление резонанса. 9. Механическая характеристика – зависимость момента, развиваемого двигателем, от частоты управляющих импульсов. Механическая характеристика имеет падающий характер, так как с ростом частоты сказывается запаздывание в нарастании тока за счет индуктивности обмоток управления. На некоторой предельной частоте момент двигателя становится равным нулю.
Билет 23
|
|||||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 354; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.134.118.95 (0.009 с.) |
 ,
, – сопротивление при температуре Т, К;
– сопротивление при температуре Т, К; – сопротивление при температуре
– сопротивление при температуре  , Ом;
, Ом; – основание натуральных логарифмов;
– основание натуральных логарифмов; – постоянная ТС, зависящая от свойств полупроводника, (от 2000 до 9000 К);
– постоянная ТС, зависящая от свойств полупроводника, (от 2000 до 9000 К); – температура терморезистора, К.
– температура терморезистора, К.