Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Методы измерения плотности веществ.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Плотность – это отношение массы вещества к его объему.
где ρ – это плотность однородного вещества или средняя плотность неоднородного вещества; m и V – масса и объем вещества. Единица плотности в Международной системе СИ – это килограмм на кубический метр (кг/м 3). В качестве кратных и дольных единиц плотности используют: мегаграмм на кубический метр (Мг/м3), килограмм на кубический дециметр (кг/дм3), грамм на кубический сантиметр (г/см3), грамм на кубический дециметр (г/дм3), грамм на литр (г/л) и грамм на миллилитр (г/мл). Единицы г/л и г/мл не применяют при точных измерениях. Плотность жидкостей и твердых тел мало изменяется под действием внешнего давления. Зависимость плотности от температуры при постоянном давлении выражается уравнением:
где ρ1 и ρ2 – соответственно плотность при температуре t1 и t2; β – это средний коэффициент объемного теплового расширения в интервале от t1 до t2 . В промышленности наибольшее распространение получили: 1) механические плотномеры (поплавковые, весовые, гидростатические); 2) рефрактометрические и поляризационные; 3) кондуктометрические; 4) радиоизотопные и ультразвуковые. В поплавковых плотномерах непрерывное автоматическое измерение плотности жидких и газообразных веществ основано на изменении массы поплавка в зависимости от плотности среды, в которой он находится (закон Архимеда). Поплавковые плотномеры бывают двух типов: 1) с плавающим поплавком (ареометры постоянной массы); 2) с полностью погруженным поплавком (ареометры постоянного объема). В приборах первого типа измеряется глубина погружения поплавка, обратно пропорциональная плотности жидкости. В приборах второго типа глубина погружения поплавка остается постоянной и измеряется действующая на него выталкивающая сила, пропорциональная плотности среды. Весовые или пикнометрические (гравитационные) плотномеры основаны на непрерывном взвешивании некоторого постоянного объема вещества. При постоянном объеме масса вещества пропорциональна его плотности, поэтому прибор градуируют в единицах плотности. Основное применение весовые плотномеры нашли для измерения средней плотности суспензий, вязких жидкостей и жидкостей, содержащих твердые включение. В жидкостных весовых плотномерах непрерывно измеряется вес U-образной трубки вместе с протекающей через нее жидкостью.
Гидростатические плотномеры основаны на том, что давление P в жидкости на глубине Н от поверхности определяется уравнением: Р= ρ g H, где ρ – плотность жидкости; g – ускорение свободного падения. При неизменной высоте столба жидкости Н давление Р является мерой ее плотности. Измерение давления столба жидкости производится различными методами. Наибольшее распространение получили мембранные, сильфонные и пьезометрические гидростатические плотномеры. Пневматические ИМ. Пневматический исполнительный механизм. Входная величина такого исполнительного механизма – давление, выходная – перемещение поршня-заслонки Пневматический исполнительный механизм (ПИМ) - пневматическое силовое устройство, предназначенное для дистанционного управления регулирующим органом (клапаном, задвижкой, краном и др.) в системах автоматического регулирования. Классификация 1.По характеру воздействия на регулирующий орган различают ПИМ с поступательным и с вращательным движением. Наибольшее распространение в промышленной пневмоавтоматике получили ПИМ с поступательным движением. Они бывают двух- и многопозиционные. Двухпозиционный ПИМ применяется для перемещения регулирующего органа из одного крайнего положения в другое, обычно по сигналу релейного элемента. Многопозиционный ПИМ ставит регулирующий орган в различные положения в зависимости от уровня управляющего сигнала. 2.По конструктивному оформлению ПИМ с поступательным движением бывают поршневые и мембранные. Схема мембранного исполнительного механизма (МИМ).
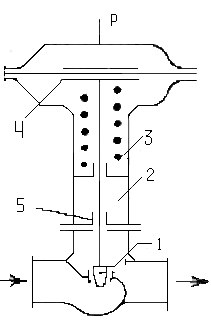
а - принципиальная схема, 1 - регулирующий орган; 2 - шток; 3 - пружина; 4 - мембрана; 5 - сальник. • Перемещение выходного штока 2, соединенного с регулирующим органом, в одну сторону осуществляется силой, которая создается давлением Р, в другую - усилием пружины 3. Сигнал Р поступает в герметичную мембранную «головку», в которой находится мембрана из прорезиненной ткани толщиной 2-4 мм с жестким центром. Снизу на мембрану давит пружина 3. • МИМы классифицируют, по размерам мембранных «головок». МИМы поставляются обычно совместно с регулирующими органами. Так как при снятии давления Р мембрана всегда перемещается вверх, то в зависимости от конструкции регулирующего органа различают нормально открытые и нормально закрытые клапаны. • Статические характеристики большинства МИМов близки к линейным, однако они обладают зоной гистерезиса, составляющей 2—15% от наибольшего значения Р. Эта величина зависит от усилий трения в сальнике 5, от перепада давлений на регулирующем органе, от характеристик пружины и эффективной площади мембраны. Перемещения штока h в среднем достигают 50 - 70мм, поэтому эффективная площадь Рэ мембраны зависит от Н. По мере возрастания Рэ зона гистерезиса уменьшается до 2—3% и практически не влияет на качество переходных процессов в АСР. Однако при этом возрастает объем надмембранной камеры и ухудшаются динамические характеристики цепочки «пневмолиния - МИМ» Поршневой пневматический исполнительный механизм представляет собой цилиндр, в котором под действием сжатого воздуха или пружины движется поршень со штоком. Он может быть одностороннего и двустороннего действия. У одностороннего ПИМа рабочий ход поршня производится под действием сжатого воздуха, а холостой - от пружины; у двустороннего - поршень перемещается в обе стороны сжатым воздухом. Если необходимо получить значительные усилия при малых диаметрах цилиндров, ПИМ выполняют сдвоенными, строенными и т. д. Основной параметр поршневого ПИМа - сила, развиваемая на штоке, которая определяется давлением сжатого воздуха и размерами цилиндра. Часто поршневой ПИМ содержит, кроме основного, ещё один, а иногда и несколько распределителей (золотников), посредством которых реализуется необходимая логика управления. Поршневые следящие приводы (ПСП) применяют в тех случаях, когда требуется перемещать шток исполнительного механизма на большое расстояние h (0<=h<=300мм). Для повышения точности и улучшения динамических характеристик поршневые приводы снабжают позиционерами, а сами приводы называют следящими. Принципиальная схема пневматического поршневого следящего привода.
1 - исполнительный механизм; 2 - большая мембрана; 3 - малая мембрана; 4 - пружина обратной связи; 5 - поршневой механизм; 6 - золотник. Он состоит из мембранного блока 7 с большой 2 и малой 3 мембранами; золотника ри увеличении Р золотник смещается влево, и давление питания Рп поступает в левую полость цилиндра 5, перемещая поршень вправо и увеличивая натяжение пружины отрицательной обратной связи до тех пор, пока не наступит равновесие сил, действующих на мембранную систему 2, 3. Следящие приводы обладают зоной нечувствительности (не выше 1%), полное время перемещения составляет несколько секунд (при отсутствии нагрузки); в области частот w<wн=0,6 рад/с их можно рассматривать как усилительные звенья 6 с тремя щелями; поршневого механизма 5 и пружины отрицательной обратной связи 4. Билет 22
|
||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 1776; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.27 (0.008 с.) |

 ,
, ,
, Вес трубки 1 с жидкостью передается на заслонку 2, перекрывающую сопло 5, и через усилитель 3 в виде унифицированного пневматического сигнала на вторичный прибор. С помощь сильфона 4 осуществляется отрицательная обратная связь и восстанавливается равновесие в системе, соответствующая измеряемой плотности жидкости. Установку настраивают таким образом, чтобы при отсутствии жидкости в трубке 1 показания вторичного прибора были равны нулю.
Вес трубки 1 с жидкостью передается на заслонку 2, перекрывающую сопло 5, и через усилитель 3 в виде унифицированного пневматического сигнала на вторичный прибор. С помощь сильфона 4 осуществляется отрицательная обратная связь и восстанавливается равновесие в системе, соответствующая измеряемой плотности жидкости. Установку настраивают таким образом, чтобы при отсутствии жидкости в трубке 1 показания вторичного прибора были равны нулю.