

Мы поможем в написании ваших работ!
ЗНАЕТЕ ЛИ ВЫ?
|
Астатические объекты управления. Динамические характеристики.
Содержание книги
- Оптоэлектронный переключатель. Принцип действия, область применения.
- Классификация су по принципу управления (управление по возмущению, по отклонению, комбинированные системы).
- Иерархический и декомпозиционный принципы проектирования.
- Государственная система приборов и средств автоматизации. Характеристика ветвей ГСП.
- Триодные и диодные тиристоры. Назначение, принцип действия.
- Технологические процессы как объекты автоматического управления. Возмущения, управляющие воздействия, входы и выходы. Обобщенная структурная схема.
- Связь компьютера с периферийными устройствами
- Электромагнитные измерительные преобразователи.
- Линейные и нелинейные САУ. Методы линеаризации статических характеристик нелинейных объектов.
- Классификация ПЛК. Моноблочные контроллеры. Модульные контроллеры. PC-base контроллеры.
- Емкостные электромеханические преобразователи
- Статические и астатические объекты управления.
- Математическое и программное обеспечение АСУТП
- Алгебраические критерии устойчивости Рауса-Гурвица.
- Классификация измерительных преобразователей температуры.
- Астатические объекты управления. Динамические характеристики.
- Расходомеры постоянного перепада давления. Принцип действия, область применения.
- Структурная схема САУ с обратной связью. Назначение элементов.
- Человеко-машинный интерфейс как элемент системы управления.
- Тиристоры. Вольт-амперные характеристики тиристоров.
- Устойчивость систем управления. Теорема Ляпунова для линейных систем.
- Проектирование щитов и стоек.
- Волновые, акустические и радиоизотопные измерительные преобразователи уровня.
- Интегрированные системы управления.
- Чувствительность, точность и погрешности измерительных преобразователей.
- Сглаживающие фильтры. Стабилизаторы напряжения.
- Комбинированный (замкнуто-разомкнутый) принцип регулирования.
- Системы автоматического контроля.
- Оптоэлектронные полупроводниковые и интегральные приборы и устройства.
- Динамические характеристики систем управления с ПИД-регулятором.
- Внешние электрические и трубные проводки.
- Выбор способа выполнения электропроводок
- Основные принципы стандартизации
- Теоретическая база стандартизации
- Логические цифровые устройства на интегральных схемах.
- Принцип действия этих расходомеров основан на изменении потенциальной энергии измеряемого вещества (жидкость, газ, пар, воздух) при протекании через искусственно суженное сечение трубопровода.
- Принципиальная схема симметричного триггера на биполярных транзисторах.
- Тензорезисторные преобразователи. Принцип действия, назначение.
- Принцип действия и назначение оптоэлектронной пары.
- Типовые законы регулирования.
- Классификация, функции и характеристики сетевых адаптеров.
- Методы измерений влажности воздуха и газов.
- Динамические характеристики астатических объектов.
- Характеристики кабелей, применяемых в компьютерных сетях.
- Компенсационные измерительные схемы.
- Классификация исполнительных механизмов.
- Устойчивость САУ. Амплитудно-фазовой критерий Найквиста.
- Индукционные расходомеры. Принцип действия, область применения.
- Методы организации доступа к линиям связи
- Акустические уровнемеры. Принцип действия, область применения.

Если на управляемый процесс действует возмущение f, то важное значение имеет статическая характеристика САУ в форме y = F(f) при yo = const. Возможны два характерных вида этих характеристик (рис.19). В соответствии с тем, какая из двух характеристик свойственна для данной САУ, разлчают статическое и астатическое регулирование.
Рассмотрим систему регулирования уровня воды в баке (рис.20). Возмущающим фактора является поток Q воды из бака. Пусть при Q = 0 имеем y = yo, e = 0. ЗУ системы настраивается так, чтобы вода при этом не поступала. При Q  0, уровень воды понижается (e 0), поплавок опускается и открывает заслонку, в бак начинает поступать вода. Новое состояние равновесия достигается при равенстве входящего и выходящего потоков воды. Но в любом случае при Q 0 заслонка должна быть обязательно открыта, что возможно только при e 0. Причем, чем больше Q, тем при больших значениях e, устанавливается новое равновесное состояние. Статическая характеристика САУ имеет характерный наклон (рис.19б). Это есть пример статического регулирования. Для получения статического регулирование, все звенья САР должны быть статическими.Статические регуляторы работают при обязательном отклонении e регулируемой величины от требуемого значения. Это отклонение тем больше, чем больше возмущение f. Это заложено в принципе действия регулятора и не является его погрешностью, поэтому данное отклонение называется статической ошибкой регулятора. Из рис.21 видно, что, чем больше коэффициент передачи регулятора Kр, тем на большую величину откроется заслонка при одних и тех же значениях e, обеспечив в установившемся режиме большую величину потока Q. Это значит, что на статической характеристике одинаковым значениям e при больших Kр будут соответствовать большие значения возмущения Q, статическая характеристика САУ пойдет более полого. Поэтому, чтобы уменьшить статическую ошибку надо увеличивать коэффициент передачи регулятора. Того же результата можно добиться, увеличивая коэффициент передачи объекта управления, но это дело конструкторов, проектирующих данный объект, а не специалистов по автоматике. 0, уровень воды понижается (e 0), поплавок опускается и открывает заслонку, в бак начинает поступать вода. Новое состояние равновесия достигается при равенстве входящего и выходящего потоков воды. Но в любом случае при Q 0 заслонка должна быть обязательно открыта, что возможно только при e 0. Причем, чем больше Q, тем при больших значениях e, устанавливается новое равновесное состояние. Статическая характеристика САУ имеет характерный наклон (рис.19б). Это есть пример статического регулирования. Для получения статического регулирование, все звенья САР должны быть статическими.Статические регуляторы работают при обязательном отклонении e регулируемой величины от требуемого значения. Это отклонение тем больше, чем больше возмущение f. Это заложено в принципе действия регулятора и не является его погрешностью, поэтому данное отклонение называется статической ошибкой регулятора. Из рис.21 видно, что, чем больше коэффициент передачи регулятора Kр, тем на большую величину откроется заслонка при одних и тех же значениях e, обеспечив в установившемся режиме большую величину потока Q. Это значит, что на статической характеристике одинаковым значениям e при больших Kр будут соответствовать большие значения возмущения Q, статическая характеристика САУ пойдет более полого. Поэтому, чтобы уменьшить статическую ошибку надо увеличивать коэффициент передачи регулятора. Того же результата можно добиться, увеличивая коэффициент передачи объекта управления, но это дело конструкторов, проектирующих данный объект, а не специалистов по автоматике.
Статизм d, САР, характеризует насколько сильно значение регулируемой величины отклоняется от требуемого значения при действии возмущений, и равна тангенсу угла наклона статической характеристики, построенной в относительных единицах: d = tg(a) =  (рис.22), где y = yн, f = fн - точка номинального режима САУ. При достаточно больших значениях Kp имеем d (рис.22), где y = yн, f = fн - точка номинального режима САУ. При достаточно больших значениях Kp имеем d  1/Kp. 1/Kp.
В некоторых случаях статическая ошибка недопустима, тогда переходят к астатическому регулированию, при котором регулируемая величина в установившемся режиме принимает точно требуемое значение независимо от величины возмущающего фактора. Статическая характеристика астатической САУ не имеет наклона (рис.19в). Возможные неточности относятся к погрешностям конкретной системы и не являются закономерными.
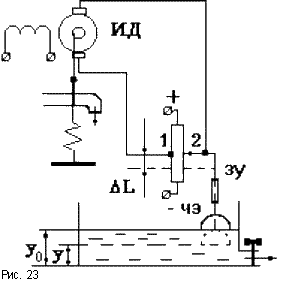
Для того, чтобы получить астатическое регулирование, необходимо в регулятор включить астатическое звено, например ИД, между ЧЭ и УО (рис.23).
Если уровень воды понизится, то поплавок переместит движок потенциометра на величину  L, за счет этого появится разность потенциалов L, за счет этого появится разность потенциалов  0 и ИД начнет поднимать заслонку до тех пор, пока не уменьшится до нуля, а это возможно только при y = yo. При поднятии уровня воды разность потенциалов сменит знак, и двигатель будет вращаться в противоположную сторону, опуская заслонку. 0 и ИД начнет поднимать заслонку до тех пор, пока не уменьшится до нуля, а это возможно только при y = yo. При поднятии уровня воды разность потенциалов сменит знак, и двигатель будет вращаться в противоположную сторону, опуская заслонку.
Достоинства и недостатки статического и астатического регулирования: статические регуляторы обладают статической ошибкой; астатические регуляторы статической ошибки не имеют, но они более инерционны, сложны конструктивно и более дороги.
Обеспечение требуемой статической точности регулирования является первой основной задачей при расчете элементов САУ.
|




