
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принципиальная схема симметричного триггера на биполярных транзисторах.
Триггерами называют электронные устройства, обладающие двумя состояниями устойчивого равновесия н способные скачкообразно переключаться из одного состояния в другое каждый раз, когда входной (управляющий) сигнал превосходит определенный уровень, называемый порогом срабатывания. Триггеры можно разбить на два класса: симметричные и несимметричные. Симметричные триггеры применяются в качестве элементов памяти и делителей частоты на два. На их основе строятся регистры сдвига и счетчики в цифровых ЭВМ. Несимметричные триггеры как пороговые устройства применяются в преобразователях непрерывных сигналов в дискретный (цифровой) код, в различителях амплитуды сигнала и в качестве разрядного устройства в генераторах импульсов. Симметричные триггеры сравнительно просто- компонуются из двух логических схем ИЛИ — НЕ или И — НЕ, которые соединяются определенным образом: выход одной логической схемы соединяется со входом другой, а выход другой — с входом первой. Другими словами, логические схемы соединяются между собой перекрестными связями. На рис. 105, а показана логическая структура симметричного триггера, выполненного на двух одинаковых транзисторных схемах ИЛИ — НЕ на два входа. На схеме выход С Симметричный триггер наиболее часто применяют в качестве элемента памяти. В этом триггере выходной потенциал может принимать два существенно различных друг от друга значения, каждое из которых соответствует логической единице и логическому нулю. Установленное в триггере состояние (или, по-другому, записанная информация) сохраняется до тех пор, пока под действием входного сигнала не произойдет его переключения. Триггер переключается из одного состояния в другое с помощью вспомогательных (управляющих) транзисторов VT2 и VT4.
Управляющими входами являются входы В1 (S — вход) и В2 (R — вход). Такое управление работой триггера называется раздельным.
Билет 14 53. Классификация алгоритмов (законов) управления. Под законом регулирования или – в более общем случае – законом управления понимается алгоритм или функциональная зависимость, в соответствии с которым управляющее устройство формирует управляющее воздействие 1. Линейные: · Пропорциональные · Интегральные · Пропорционально-интегральные · Пропорционально-дифференциальные · Пропорционально-интегрально-дифференциальные 2. Нелинейные: · Функциональные · Логические · Оптимизирующие · Параметрические Линейной называется система, которая описывается линейными уравнениями. В противном случае система является нелинейной. Чтобы система была нелинейной, достаточно иметь в ее составе хотя бы один элемент, описываемый нелинейным уравнением. Для линейных систем справедлив принцип суперпозиции. Он заключается в том, что реакция системы на любую комбинацию внешних воздействий равна сумме реакции на каждое из этих воздействий, поданных на систему порознь. Благодаря принципу суперпозиции разработана общая теория линейных систем автоматического управления, описываемых линейными дифференциальными уравнениями любого порядка.
К нелинейным системам принцип суперпозиции не применим. предложен пропорционально–интегральный алгоритм управления (ПИ-алгоритм), задаваемый выражением
Как видно из (1.7) ПИ-алгоритм представляет собой линейную комбинацию алгоритмов (1.5) и (1.6). Поэтому он, сохраняя достоинства И-алгоритма, позволяет повысить его быстродействие благодаря введению пропорциональной составляющей ошибки управления.
В целях повышения эффективности управления важно не только своевременно реагировать на мгновенные изменения величины
 . Такой прогноз может быть сделан на основе анализа значений производной . Такой прогноз может быть сделан на основе анализа значений производной  . Если в момент времени . Если в момент времени  величина положительна, то в последующие моменты времени следует ожидать возрастания ошибки управления , а в противном случае ее уменьшения. величина положительна, то в последующие моменты времени следует ожидать возрастания ошибки управления , а в противном случае ее уменьшения.
Изложенные соображения привели к созданию пропорционально–интегрального–дифференциального алгоритма (ПИД-алгоритма) управления, записываемого в виде
где Замена ПИ-регулятора на ПИД-регулятор обычно позволяет повысить качество управления, но при этом появляется дополнительный параметр настройки Следует отметить, что реальные регуляторы по разным причинам лишь приближенно реализуют законы управления (1,7 – (1.8). Тем не менее, при расчете их параметров настройки обычно считают, что эти законы реализованы точно, а возможные отклонения от них относят к управляемому объекту, т.е. регулятор разбивают на два блока, первый из которых идеально реализует типовой алгоритм управления, а второй изменяет его выходной сигнал таким образом, чтобы он совпадал с выходным сигналом реального регулятора. Этот второй блок и включают условно в состав управляемого объекта, принимая, что его вход совпадает со входом второго блока. Методика выбора ПЛК. Требования к ЭВМ, используемых в АСУТП. Выбор контроллера доля распределенных СУ обусловлены большим числом разнородных факторов зависящих прежде всего от того яв-ся ли система вновь проектируемой или решаются задачи модернизации существующей системы. Автоматические регуляторы, или программируемые логические контроллеры (ПЛК), являются широко распространенными средствами автоматизации в составе локальных и распределенных систем контроля и управления. Термином ПЛК обозначают устройства, осуществляющие преобразование, обработку, хранение информации и выработку команд управления или управляющих регулирующих воздействий, реализованные на базе микропроцессорной техники и являющиеся, по сути, специализированными управляющими вычислительными комплексами для работы в локальных и распределенных системах управления в реальном масштабе времени. Требования, предъявляемые к ПЛК, разнообразны, так как ПЛК используются для всевозможных видов деятельности (рабочими, технологами, инженерами). ПЛК может представлять собой либо целый, неделимый продукт, поставляемый одним производителем, либо несколько продуктов – составных частей, поставляемых одним или разными производителями. По функциональному назначению в ПЛК можно выделить следующие основные части: процессор, осуществляющий прием, обработку и выдачу информации; устройство сопряжения процессора с объектом (УСО), устройство сопряжения процессора с человеком-оператором и программное обеспечение (ПО).
Требования к ЭВМ, используемых в АСУТП 1) средства программной обработки (процессор, память); 2) средства ввода-вывода, отображения данных (носители, устройства ввода, принтер, сканер, монитор); 3) архив проектных решений (магнитооптические и лазерные устройства); 4) средства передачи данных между территориально разнесенными ЭВМ (локальные и корпоративные сети). 1. Очень высокая производительность вычислительной техники (ВТ). При проектировании используется оптимизационный алгоритм в том или ином виде, а это очень замедляет работу на отдельных этапах. Единственный выход — использовать высокопроизводительную вычислительную технику. 2. Требуется высокая точность расчетов. Если требуется работа с 32-разрядными числами на машинах с меньшей разрядностью, то скорость и быстродействие очень резко падают. Выход - использовать 32-разрядные, 64-разрядные (и выше) машины с большой тактовой частотой. 3. Техника должна иметь чрезвычайно развитую периферийную аппаратуру ("мышь", диджитайзер, сканеры и т.д.). 4. Комплекс технических средств должен позволять параллельную разработку подсистем проектируемой системы одновременно разными конструкторами. 5. Конструкторская база данных единая, а проектируют все одновременно на своих компьютерах, база данных установлена на сервере. 6. Периферийная техника должна быть установлена непосредственно в подразделениях конструкторского бюро. Проще всего защитить информацию и технику, если все собрать в ВЦ. 7. ВТ должна обеспечивать необходимый уровень секретности и защиты информации. 8. Носители должны соответствовать характеру используемой информации.
|
|||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 592; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.253.221 (0.015 с.) |
 соединен с входом А
соединен с входом А  , а выход С
, а выход С 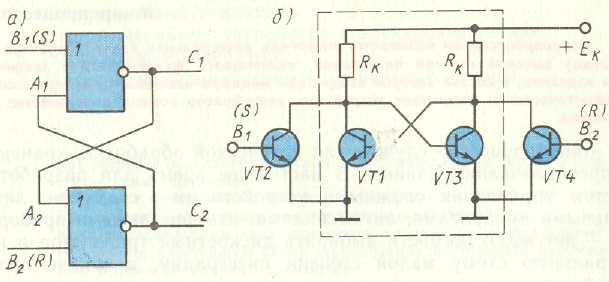
 .
.
 . (1.7)
. (1.7)

 , (1.8)
, (1.8) – постоянная времени дифференцирования.
– постоянная времени дифференцирования.


