Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Комбинированный (замкнуто-разомкнутый) принцип регулирования.
Разомкнутые, замкнутые и комбинированные системы управления
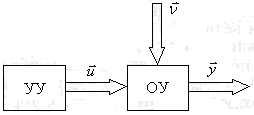
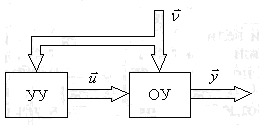
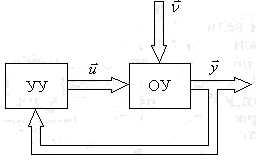
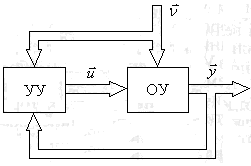
а) принцип управления с полностью априорной информацией Данный принцип управления осуществляется управляющим устройством (УУ) только при заведомо абсолютно точном знании всех внешних и внутренних условиях работы. б) Принцип управления по внешнему возмущению В структуре обязательны датчики возмущения. Данная система является разомкнутой. Достоинства: · Можно добиться полной инвариантности к определенным возмущениям. · Не возникает проблема устойчивости системы, т.к. нет ОС. Недостатки: · Большое количество возмущений требует соответствующего количества компенсационных каналов. · Изменения параметров регулируемого объекта приводят к появлению ошибок в управлении. · Можно применять только к тем объектам, чьи характеристики четко известны. в) Принцип управления по отклонению Данная система является замкнутой. Алгоритм работы системы заключен в стремлении свести ошибку управления к нулю. Достоинства: · ООС приводит к уменьшению ошибки не зависимо от факторов ее вызвавших (изменений параметров регулируемого объекта или внешних условий). Недостатки: · В системах с ОС возникает проблема устойчивости. · В системах принципиально невозможно добиться абсолютной инвариантности к возмущениям. Стремление добиться частичной инвариантности (не 1-ыми ОС) приводит к усложнению системы и ухудшению устойчивости. г) Комбинированное управление Комбинированное управление заключено в сочетании двух принципов управления по отклонению и внешнему возмущению. Т.е. сигнал управления на объект формируется двумя каналами. Первый канал чувствителен к отклонению регулируемой величины от задания. Второй формирует управляющее воздействие непосредственно из задающего или возмущающего сигнала. Достоинства: · Наличие ООС делает систему менее чувствительной к изменению параметров регулируемого объекта. · Добавление канала(ов), чувствительного к заданию или к возмущению, не влияет на устойчивость контура ОС. Недостатки: · Каналы, чувствительные к заданию или к возмущению, обычно содержат дифференцирующие звенья. Их практическая реализация затруднена.
· Не все объекты допускают форсирование.
1.Разомкнутые,замкнутые и комбинированные системы управления. Построение АСР базируется на ряде общих принципов регулирования, основные из которых следующие: регулирование по отклонению, регулирование по возмущению, комбинированное регулирование. Принцип автоматического регулирования определяет, как и на основе какой информации формируется регулирующее воздействие на объект регулирования. Одним из основных признаков, характеризующих принцип регулирования, является рабочая информация, необходимая для выработки регулирующего воздействия, а, следовательно, и структура цепи передачи воздействий в системе. Принцип регулирования по отклонению, называемый также принципом Ползунова—Уатта, поясняется схемой (рис. 158, а), состоящей из двух составных частей — объекта регулирования ОР и регулятора Р, взаимосвязанных между собой цепочкой воздействий. Регулируемый параметр у (t) сравнивается с заданным значением g (t). На основании разности этих двух величин е (t) = g (t) — у (t) вырабатывается регулирующее воздействие г (t). Величина е (t), называемая отклонением или ошибкой системы регулирования, не должна превышать определенного значения. Тогда между регулируемым параметром у (t) и ее заданным значением g (t) устанавливается вполне определенное соответствие, и, изменяя величину g (t), можно управлять регулируемым параметром у (t). Для сравнения фактического значения регулируемого параметра с его заданным значением этот параметр подается с выхода объекта регулирования на вход регулятора (на элемент сравнения ЭС), в результате чего образуется замкнутый контур передачи воздействий. Регулируемый параметр через главную обратную связь подается на вход регулятора со знаком обратным по отношению к входному воздействию g (t). Поэтому главная обратная связь считается отрицательной. Отличительной чертой замкнутых систем является их универсальность. Это качество проявляется в том, что любое отклонение регулируемого параметра от его заданного значения вызывает появление регулирующего воздействия независимо от числа, вида и места приложения возмущений. Одним регулирующим воздействием часто достигается удовлетворительная компенсация нескольких возмущений. Это особенно важно, когда объект регулирования подвержен воздействию многочисленных возмущений, влияние которых на регулируемый параметр невозможно предусмотреть.
При управлении сложными инерционными объектами со значительным временем запаздывания, когда регулирующее воздействие не может вызвать мгновенного изменения регулируемого параметра, возникающее отклонение (ошибка) может иметь недопустимо большое значение. Сущность принципа регулирования по возмущению, или принципа компенсации, состоит в том, что из различных возмущений, действующих в системе, выбирается одно, главное, на которое и реагирует АСР. В этом случае компенсируется влияние на регулируемый параметр только основного возмущающего воздействия и регулирующее воздействие вырабатывается в системе в зависимости от результатов измерения основного возмущения, действующего на объект. Этот принцип часто называют регулированием по нагрузке, так как при поддержании, например, постоянного напряжения генератора регулирующее воздействие зависит от изменения нагрузки. Достоинство этого принципа регулирования заключается в том, что влияние возмущающего воздействия может быть устранено до того, как произойдет отклонение регулируемого параметра, так как регулятор действует на объект без запаздывания по отношению к возникшему возмущению. комбинированного регулирования, сочетающий в себе оба принципа регулирования. При этом в системе (см. рис. 158, в) с замкнутым контуром, образуемым главной отрицательной обратной связью, имеется разомкнутый контур передачи воздействия, компенсирующего основное возмущающее воздействие — изменение нагрузки. Действие неучтенных возмущений в комбинированных системах компенсируется или ослабляется контуром регулирования по отклонению. В комбинированной системе воздействие по нагрузке обеспечивает немедленное возникновение регулирующего воздействия г (f) в соответствии с изменением нагрузки, а воздействие по отклонению используется для устранения погрешностей, возникающих в результате неточности регулирования по нагрузке.
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 490; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.142.96.146 (0.006 с.) |