
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Классификация систем автоматики.Содержание книги
Поиск на нашем сайте Билет 1 -26 1. Основные понятия и определения теории автоматизации технологических процессов. На современном этапе развития производства автоматизация рассматривается как важнейшее направление научно-технического прогресса. Центральной задачей автоматизации производства является создание и управление высокоинтенсивными технологическими процессами и средствами производства, исключающими ручной труд. Для решения этих задач необходимы конкретные знания данного производства, его технологии, а также знания технических средств автоматизации, принципов и методов управления. Наука об общих принципах и методах построения автоматически действующих устройств и систем называется автоматикой. Автоматикатика — это совокупность механизмов и устройств, действующих автоматически. Информационные функции — это совокупность операций и процедур, которые обеспечивают получение, обработку и представление информации о состоянии ОУ или систем контроля и управления оперативному персоналу или в смежные системы. Управляющие функции — это совокупность операций и процедур, которые обеспечивают выработку и реализацию управляющих воздействий на ОУ или САУ. К основным информационным функциям относят: измерение и контроль технологических параметров; подготовку и передачу информации в смежные системы контроля и управления; вычисление технико-экономических показателей и показателей качества продукции и т. п. Состав вспомогательных функций определяется обеспечением работоспособности систем контроля и управления. Автоматический контроль и сигнализация предназначены для выполнения непрерывного измерения, записи параметров, характеризующих состояние и работу технологического оборудования, а также для формирования предупредительных сигналов при отклонении этих величин от допустимых пределов. Автоматическое регулирование поддерживает постоянство или закономерное изменение регулируемых величин, обеспечивающих безопасность, надежность и эффективность эксплуатации технологического оборудования. Автоматический пуск и остановка обеспечивают запуск в действие технологического оборудования по сигналу из пункта управления, но при наличии определенной совокупности внешних условий. При этом соблюдаются последовательность операций и координация их между собой. Автоматическая защита предохраняет действующее оборудование от аварий. В зависимости от степени участия оператора в процессе управления различают следующие режимы: автоматического управления — автоматический режим, при котором управление происходит без участия оператора, но по его заданию и при его контроле; полуавтоматического управления — полуавтоматический режим (автоматизированный режим), при котором реализация основных командных операций по управлению возлагается на оператора; ручного управления — ручной режим, при котором все операции по управлению осуществляются оператором. Автоматическое, автоматизированное и ручное управление обеспечивают заданный порядок и последовательность пуска, работы и остановки механизмов и устройств, участвующих в процессе, путем введения соответствующих блокировок.
Запаздывающее звено Уравнение звена y(t)=x(t)(t-τ); где τ – время чистого запаздывания. Запаздывающее звено передает сигнал без искажения, но с задержкой на время τ. Передаточная функция W(s)= е – S Переходная функция h(t)=1(t-τ), т.е. переходная характеристика представляет собой повторение входного сигнала (единичного скачка), но с задержкой на время τ. Импульсная переходная функция ω(t)=δ(t-τ). Частотные характеристики КПФ звена АФЧХ звена представляет собой окружность с центром в начале координат и радиусом равным единице. Модуль КПФ Аргумент КПФ φ(ω)=-ω*τ, т.е. с увеличением частоты и времени чистого запаздывание отставание выходного колебания по фазе увеличивается.
3. Принцип управления по возмущению Принцип управления по возмущению - принцип компенсации. Отклонение регулируемой величины зависит не только от возмущающего воздействия, но и от управления. Принцип управления по возмущению основывается на том, что система управления наблюдает за возмущающими факторами и, учитывая их, строит алгоритм управления так, чтобы действие этих факторов на систему компенсировалось. Функциональная схема управления по возмущению показана на рисунке
Данная схема применяется в случае, когда влияние возмущающих воздействий существенно, и в случае отсутствия их учета система может сильно отклоняться от желаемого состояния. При такой схеме теоретически возможна полная компенсация влияния возмущений, но только по тем воздействиям, по которым ведется учет. Однако в реальной системе невозможно вести учет всех возмущений, поэтому невозможна и полная компенсация их влияния.
Билет 2-27 1 Основные понятия и определения теории автоматического управления. Кибернетика — это наука, которая изучает общие законы управления в разных системах: технических, биологических, экономических на основе переработки информации в системах различной природы — машине, обществе, животном. Управление реализуется целенаправленной координацией деятельности (действия) различных элементов той или иной системы. Кибернетику подразделяют на три вида: техническая кибернетика, экономическая кибернетика и биокибернетика. Техническая кибернетика изучает технические средства (роботы и другие технические устройства), способные заменить человека при управлении трудоемкими технологическими процессами или операциями на производстве. Автоматические и автоматизированные системы управления являются элементами технической кибернетики. Система — это совокупность элементов, находящихся в отношениях и связях друг с другом, которая образует определенную целостность и единство.Каждая система может состоять из ряда подсистем. Подсистемой называется часть системы, выделенная по определенному признаку. Подсистему, в свою очередь, можно рассматривать как систему по отношению к ее внутренним элементам. Любая кибернетическая система состоит из двух подсистем: управляющей и управляемой. Управляющей называется подсистема, которая реализует процесс переработки информации, воспринимая информацию, характеризующую состояние системы, перерабатывая и генерируя новую информацию. Управляемой является подсистема, которая под действием данной информации реализует процессы функционирования всей системы. Система управления представляет собой единство управляющей и управляемой подсистем (рис. 2.1). Кибернетические системы можно подразделить на простые, сложные и очень сложные. Простые системы — это системы, не имеющие разветвленной структуры (отсутствуют иерархические уровни), с небольшим количеством взаимосвязанных и взаимодействующих элементов, выполняющих более сложные функции. При этом изменения в них легко описываются. Сложные системы — это системы с разветвленной структурой и значительным количеством взаимосвязанных и взаимодействующих элементов, выполняющих более сложные функции. Очень сложные системы — это такие системы, состояние которых по различным причинам до сих пор не удается подробно описать (пример — Солнечная система в мировом пространстве). Связью в кибернетике являются процессы получения информации, ее хранения и передачи. Различают два вида связи: прямую и обратную. Прямая связь — связь, определяющая воздействие на объект управления, вид соединения элементов системы управления, при котором входное воздействие элемента А передается на вход какого кого-либо элемента В. Обратная связь — связь, позволяющая осуществить выбор управляющего воздействия в зависимости от состояния системы.
И – регуляторы. И – регулятором называется такой регулятор, у которого скорость перемещения РО пропорционально отклонению регулируемого параметра от заданного значения. Передаточная функция И – регулятора
где У И – регулятора нет жесткой зависимости между отклонением регулируемой величины и положением РО. В момент прекращения работы АР регулирующий орган может занимать любое положение в пределах возможного диапазона перемещений. Основное достоинства И – регуляторов отсутствие остаточного отклонения регулируемой величины по окончании процесса регулирования. Это объясняется тем, что регулирующее воздействие регулятора на объект прекращается в тот момент, когда отклонение регулируемой величины от заданного значения становится равным нулю. Недостатком И – регулятора является относительно низкая скорость, которая характеризуется значением параметра настройки регулятора
3 Принцип регулирования по отклонению. (Принцип обратной связи) В замкнутой системе в управляющее устройство поступает информация о фактическом значении регулируемой величины (есть обратная связь). Обычно замкнутая система строится по принципурегулирования по отклонению. Сущность принципа: управляющее воздействие формируется на основе информации об отклонении регулируемой величины от ее заданного значения, так чтобы уменьшить это отклонение до допустимых значений, а в идеале полностью устранить его. Величину отклонения регулируемой величины от задания: e=x–y называют ошибкой регулирования (или просто ошибкой).
Элементы системы охваченные обратной связью образуют замкнутый контур, поэтому такие системы называются замкнутыми. Регулируемая величина вычитается из задания, поэтому такая обратная связь называется отрицательной. Ошибка может возникать по двум причинам. 1) Изменение значения регулируемой величины под действием возмущений. 2) Изменение задающего воздействия.
Билет 3-28 П – регуляторы. П – регулятором называется такой регулятор, у которого перемещение РО пропорционально отклонению регулируемой величины от заданного значения.
где Передаточная функция П – регулятора
т.е. П – регулятор представляет пропорциональное звено. Основным преимуществом П – регулятора является высокая скорость регулирования (пропорционально скорости изменения регулируемой величины). Главный недостаток – наличие остаточного отклонения регулируемой величины (статическая ошибка).
Билет 8-33 ПИД – регулятор. ПИД – регуляторам называется регулятор, у которого перемещение РО пропорционально отклонению регулируемой величины от задания, интегралу от этого отклонения и скорости его изменения, т.е.
где Передаточная функция ПИД – регулятора
Как видно из уравнения (13.7), регулирующее воздействие состоит из пропорциональной, интегральной и дифференциальной составляющих. Последняя из них тем больше, чем больше скорость изменения отклонения регулируемой величины, т.е. регулирующее воздействие вырабатывается как бы заранее, не дожидаясь наступления значительного отклонение регулируемой величины. Введение дифференциальной составляющей закон регулирования позволяет улучшить качество переходного процесса в АСР. Однако, настройка ПИД – регулятора, связанная с определением трёх параметров, сложна, при неправильной настройке качество регулирования может оказаться хуже, чем при использовании более простых регуляторов. 3) Идеальное дифференцирующее звено Уравнение звена Передаточная функция W(S)=КS Переходная функция h(t)=Кδ(t), где δ(t) – дельта функция. Частотные характеристики КПФ звена W(jω)=jкω, т.е. АФЧХ звена совпадает с положительной мнимой осью. При ω=0 А(ω)=0, с увеличением частоты А(ω) увеличивается и при ω=∞ А(ω)=∞. Модуль КПФ А(ω)=ωК, аргумент КПФ φ(ω)=90°, т.е. с увеличением частоты амплитуда выходного сигнала увеличивается. Аргумент не зависит от частоты и равен 90°, т.е. идеальное дифференцирующее звено вносит опережение, равное 90°, на всех частотах.
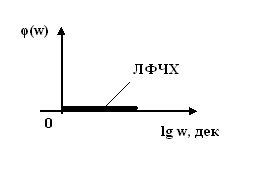
Рисунок 11.4 АФЧХ звена Выражение для ЛАЧХ звена записывается в виде ЛФЧХ идеально дифференцирующего звена – прямая, параллельная оси абсцисс, проведенная на уровне 90° а) Рис а) – ЛАЧХ звена, б) – ЛФЧХ звена
Билет 9-34 1) Критерий устойчивости Найквиста позволяет судить об устойчивости замкнутой системы по амплитудно-фазовой характеристике (АФХ) разомкнутой системы. Это главное преимущество критерия устойчивости Найквиста, благодаря которому он имеет широкое применение на практике. АФХ разомкнутой САР построить достаточно просто по контрольным точкам. Для этого в W(s) поставить s=jw, разбить на мнимую и вещественную части W(s) и построить в координатах Jm-Re. Формулировка критерия устойчивости Найквиста: для устойчивости замкнутой системы необходимо и достаточно, чтобы АФХ разомкнутой САР не охватывала точку с координатами (-1; j0). 2.Частотные характеристики описывают вынужденные колебания на выходе системы, вызванные гармоническим воздействием на входе. Эти характеристики строятся на основании их комплексных передаточных функции (КПФ). КПФ системы (звена) W(j Комплексные изображения входного и выходного сигнала имеют вид
Отсюда можно определить КПФ системы W (j где A ( КПФ можно представить и в алгебраической форме W (j где P( Зависимость модуля КПФ от частоты амплитудной частотной характеристикой (АЧХ). Зависимость аргумента КПФ от частоты называет фаза – частотный характеристикой (ФЧХ). ЛЧХ (логарифмическая частотная характеристика) системы получается сложением ЛЧХ отдельных ее элементов, т.е. операция умножения заменяется операциями сложения.Зависимость логарифма модуля ln A ( И – регуляторы И – регулятором называется такой регулятор, у которого скорость перемещения РО пропорционально отклонению регулируемого параметра от заданного значения.
где У И – регулятора нет жесткой зависимости между отклонением регулируемой величины и положением РО. В момент прекращения работы АР регулирующий орган может занимать любое положение в пределах возможного диапазона перемещений. Основное достоинства И – регуляторов отсутствие остаточного отклонения регулируемой величины по окончании процесса регулирования. Это объясняется тем, что регулирующее воздействие регулятора на объект прекращается в тот момент, когда отклонение регулируемой величины от заданного значения становится равным нулю. Недостатком И – регулятора является относительно низкая скорость, которая характеризуется значением параметра настройки регулятора
Билет №10-35 Билет №11-36 1.Пропорциональное звено. Уравнение звена
Билет №12-37 1.Идеальное апериодическое звено 1-го порядка. Уравнение звена А) а) Переходная характеристика, б) импульсно переходная характеристика Импульсная переходная функция Частотные характеристики: КПФ звена определяется выражением Аргумент КПФ: а) 2.Принцип регулирования по отклонению. (Принцип обратной связи). АСР по отклонению работает по замкнутому циклу, т.е. имеет обратную связь. Управляющее воздействие U(t) формируется как функция от отклонения регулируемой величины y(t) от ее предписанного значения x(t): U(t)=F [ E(t) ], где E(t)=x(t) - y(t), y(t) – текущее значение регулируемой величины. x(t) - предписанное значение регулируемой величины (заданное воздействие). Достоинство: Информация о регулируемом параметре поступает на вход АР через ОС и учитывается при формировании управленческого воздействия. Недостаток: 1. Имеет ошибку регулирования при переходном процессе. 2. Имеет свойство к неустойчивости и склонности к колебаниям при работе системы с большим коэффициентом передачи. Существует комбинированная АСР – которая включает принцип регулирования по возмущению и отклонению. 3.П – регулятор. П – регулятором называется такой регулятор, у которого перемещение РО пропорционально отклонению регулируемой величины от заданного значения. Билет №13-38 Интегрирующее звено. Сущность принципа Понселе. ПИД – регулятор. Интегрирующее звено Уравнение звена Передаточная функция звена W(S)=К/S; Переходная функция Переходная характеристика представляет собой прямую, проходящую через начало координат с угловым коэффициентом наклона, равным К (Рис. 7.1) Рисунок 10.1 Переходная характеристика Импульсная переходная функция звена ω(t)=К, т.е. импульсная переходная характеристика расположена параллельно оси абсцисс. Частотные характеристики КПФ звена АФЧХ звена совпадает с мнимой осью.
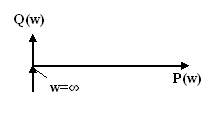
Рисунок10.2 АФЧХ звена
Модуль КПФ А(ω)=К/ω, аргумент КПФ φ(ω)=-π/2. Из этих выражений следует, что при ω=0 А(ω)=∞, с увеличением частоты А(ω) уменьшается и при ω=∞ А(ω)=0. Аргумент φ(ω) не зависит от частоты и равен – 90°, т.е. интегрирующее звено вносит запаздывание колебаний по фазе, равное 90°, на всех частотах.
2. Сущность принципа регулирования по возмущению (Понселе - Чиколева), или принципа компенсации, состоит в том, что из различных возмущений, действующих в системе, выбирается одно, главное, на которое и реагирует АСР. В этом случае компенсируется влияние на регулируемый параметр только основного возмущающего воздействия и регулирующее воздействие вырабатывается в системе в зависимости от результатов измерения основного возмущения, действующего на объект Однако практическая реализация такой системы наталкивается на затруднения. Достоинства: Возможна полная компенсация действия возмущения. Компенсирующее устройство не влияет на устойчивость. Простота регулятора. Недостатки: Необходимо сравнительно точно измерять возмущающие воздействия, что не всегда может быть выполнено, так как возмущающие силы обычно не поддаются точному измерению. Реализация регулятора в общем случае невозможна, так как в передаточной функции Wp(p)=1/Wor(p) порядок числителя, как правило, выше порядка знаменателя. Регулирование по возмущению может быть использовано лишь для объектов устойчивых. Компенсируется только измеренное возмущение. Приборы для измерения возмущений сложные и дорогие. Такие системы применяются в тех случаях, когда не требуется высокая точность выполнения алгоритма функционирования объекта. 3.ПИД – регулятор. ПИД – регуляторам называется регулятор, у которого перемещение РО пропорционально отклонению регулируемой величины от задания, интегралу от этого отклонения и скорости его изменения, т.е.
где Передаточная функция ПИД – регулятора
Как видно из уравнения (13.7), регулирующее воздействие состоит из пропорциональной, интегральной и дифференциальной составляющих. Последняя из них тем больше, чем больше скорость изменения отклонения регулируемой величины, т.е. регулирующее воздействие вырабатывается как бы заранее, не дожидаясь наступления значительного отклонение регулируемой величины. Введение дифференциальной составляющей закон регулирования позволяет улучшить качество переходного процесса в АСР. Однако, настройка ПИД – регулятора, связанная с определением трёх параметров, сложна, при неправильной настройке качество регулирования может оказаться хуже, чем при использовании более простых регуляторов.
Билет №14-39 Запаздывающее звено. 3.И – регулятор. Запаздывающее звено Уравнение звена y(t)=x(t)(t-τ); где τ – время чистого запаздывания. Запаздывающее звено передает сигнал без искажения, но с задержкой на время τ. Передаточная функция W(s)= е – S Переходная функция h(t)=1(t-τ), т.е. переходная характеристика представляет собой повторение входного сигнала (единичного скачка), но с задержкой на время τ. Импульсная переходная функция ω(t)=δ(t-τ). Частотные характеристики КПФ звена АФЧХ звена представляет собой окружность с центром в начале координат и радиусом равным единице. Модуль КПФ Аргумент КПФ φ(ω)=-ω*τ, т.е. с увеличением частоты и времени чистого запаздывание отставание выходного колебания по фазе увеличивается.
И – регуляторы И – регулятором называется такой регулятор, у которого скорость перемещения РО пропорционально отклонению регулируемого параметра от заданного значения.
где У И – регулятора нет жесткой зависимости между отклонением регулируемой величины и положением РО. В момент прекращения работы АР регулирующий орган может занимать любое положение в пределах возможного диапазона перемещений. Основное достоинства И – регуляторов отсутствие остаточного отклонения регулируемой величины по окончании процесса регулирования. Это объясняется тем, что регулирующее воздействие регулятора на объект прекращается в тот момент, когда отклонение регулируемой величины от заданного значения становится равным нулю. Недостатком И – регулятора является относительно низкая скорость, которая характеризуется значением параметра настройки регулятора Билет №16-41 Статическое регулирование. Статические (пропорциональные) – это такое регулирование когда регулируемый параметр y(t) после п/х процесса принимает новое значение, отличное от первоначального. Остаточное отклонения E(t)= y – y0 регулируемого параметра называют статической ошибкой. При статических регулированиях каждому значению регулируемого параметра соответствует определенное положение регулирующего органа РО, т.е. относится к системе прямого действия. И – регуляторы И – регулятором называется такой регулятор, у которого скорость перемещения РО пропорционально отклонению регулируемого параметра от заданного значения. Передаточная функция И – регулятора
где У И – регулятора нет жесткой зависимости между отклонением регулируемой величины и положением РО. В момент прекращения работы АР регулирующий орган может занимать любое положение в пределах возможного диапазона перемещений. Основное достоинства И – регуляторов отсутствие остаточного отклонения регулируемой величины по окончании процесса регулирования. Это объясняется тем, что регулирующее воздействие регулятора на объект прекращается в тот момент, когда отклонение регулируемой величины от заданного значения становится равным нулю. Недостатком И – регулятора является относительно низкая скорость, которая характеризуется значением параметра настройки регулятора Билет №17-42 ПИ – регулятор. Обычно П – регулятор применяется в сочетании с П – знаком регулирования. ПИ – регулятором называется регулятор, у которого перемещение РО пропорционально отклонению регулируемой величины и интегралу отклонения:
где Передаточная функция ПИ – регулятора
Из выражения (8.5) следует, что ПИ – регулятор можно рассматривать как параллельное соединение П и И – регуляторов. Поэтому в его свойствах сочетаются свойства обоих этих регуляторов, т.е. регулирование производится без остаточного отклонения (статическую ошибку не имеет), но с большой скоростью, чем в И – регуляторе. Билет 20-45 Статическое регулирование. ПИД – регулятор. ПИД – регуляторам называется регулятор, у которого перемещение РО пропорционально отклонению регулируемой величины от задания, интегралу от этого отклонения и скорости его изменения, т.е. ё где Как видно из уравнения (13.7), регулирующее воздействие состоит из пропорциональной, интегральной и дифференциальной составляющих. Последняя из них тем больше, чем больше скорость изменения отклонения регулируемой величины, т.е. регулирующее воздействие вырабатывается как бы заранее, не дожидаясь наступления значительного отклонение регулируемой величины. Введение дифференциальной составляющей закон регулирования позволяет улучшить качество переходного процесса в АСР. Однако, настройка ПИД – регулятора, связанная с определением трёх параметров, сложна, при неправильной настройке качество регулирования может оказаться хуже, чем при использовании более простых регуляторов. Различают два вида регулирования: статическое и астатическое. Статическое – такое регулирование, когда установившаяся величина регулируемого параметра в конце переходного процесса принимает новое значение, отличное от первоначального (заданного). Это остаточное отклонение регулируемого параметра называют статическое регулирование. Статические (проп
|
||
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 374; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.39 (0.01 с.) |


 .
.

 или
или  (12.3)
(12.3) (12.4)
(12.4) = 1/Ти параметры настройки И – регулятора, Ти - постоянная интегрирования
= 1/Ти параметры настройки И – регулятора, Ти - постоянная интегрирования . Чем больше
. Чем больше 
 (12.1)
(12.1) параметры настройки П –регулятора.
параметры настройки П –регулятора. (12.2)
(12.2) (13.7)
(13.7) = 1/Тии
= 1/Тии  = Тд – параметры настройки ПИД–регулятора, Тд-время дифференцирования
= Тд – параметры настройки ПИД–регулятора, Тд-время дифференцирования (13.8)
(13.8) , т.е. выходной сигнал пропорционально скоростью изменение входного сигнала.
, т.е. выходной сигнал пропорционально скоростью изменение входного сигнала.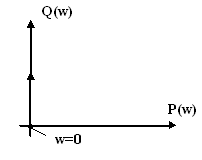
 . ЛАЧХ идеально дифференцирующего звена представляет собой прямую с наклоном 20 дб/дек, имеющую при ω=1 ординату, равную 20 lg к.
. ЛАЧХ идеально дифференцирующего звена представляет собой прямую с наклоном 20 дб/дек, имеющую при ω=1 ординату, равную 20 lg к.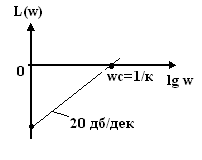 б)
б) 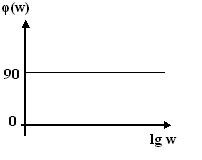
 ) представляет собой отношение изображении в виде комплексных чисел выходной и входной величин системы (звена) в установившемся режиме гармонических колебаний, т.е. W(j
) представляет собой отношение изображении в виде комплексных чисел выходной и входной величин системы (звена) в установившемся режиме гармонических колебаний, т.е. W(j  , где
, где  и
и  комплексы выходной и входной величин, определяется следующим образом. Если на вход системы подать синусоидальный сигнал x = Ax sin(
комплексы выходной и входной величин, определяется следующим образом. Если на вход системы подать синусоидальный сигнал x = Ax sin(  = Ax e j(ωt + φ
= Ax e j(ωt + φ  );
);  = Ay e j(ωt + φ
= Ay e j(ωt + φ  )
) . e j(φ
. e j(φ  , где x(t) – входная, y(t) – выходная величины, к – передаточный коэффициент. Передаточная функция
, где x(t) – входная, y(t) – выходная величины, к – передаточный коэффициент. Передаточная функция  Переходная функция
Переходная функция  , т.е. при подаче на вход звена единичного скачка, выходная величина копирует изменение входной величины без запаздывания и искажения, но в другом масштабе. Поэтому пропорциональное звено называют еще безинерционным. Импульсная переходная функция представляет мгновенный бесконечно большой амплитудой импульс.
, т.е. при подаче на вход звена единичного скачка, выходная величина копирует изменение входной величины без запаздывания и искажения, но в другом масштабе. Поэтому пропорциональное звено называют еще безинерционным. Импульсная переходная функция представляет мгновенный бесконечно большой амплитудой импульс.  . Площадь мгновенного импульса равняется коэффициенту передачи звено. Частотные характеристики: КПФ звена W(jω)=к. АФЧХ звена в комплексной плоскости представляет точку на вещественной оси, удаленную от начало координат на расстояние к. Модуль КПФ А(ω)=к, т.е. амплитуда выходного колебания не зависят от частоты. Аргумент КПФ φ(ω)=0, т.е. выходные колебания совпадает по фазе с колебаниями на входе на всех частотах (сдвиг фаз отсутствует). Выражение ЛАЧХ звена имеет вид
. Площадь мгновенного импульса равняется коэффициенту передачи звено. Частотные характеристики: КПФ звена W(jω)=к. АФЧХ звена в комплексной плоскости представляет точку на вещественной оси, удаленную от начало координат на расстояние к. Модуль КПФ А(ω)=к, т.е. амплитуда выходного колебания не зависят от частоты. Аргумент КПФ φ(ω)=0, т.е. выходные колебания совпадает по фазе с колебаниями на входе на всех частотах (сдвиг фаз отсутствует). Выражение ЛАЧХ звена имеет вид  . ЛАЧХ звена представляет прямую, параллельную оси частот. ЛФЧХ звена представляет прямую, совпадающей с положительной вещественной осью (φ(ω)=0).
. ЛАЧХ звена представляет прямую, параллельную оси частот. ЛФЧХ звена представляет прямую, совпадающей с положительной вещественной осью (φ(ω)=0).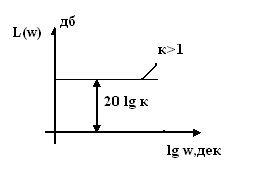
 ЛАЧХ и ЛФЧХ пропорционального звена
ЛАЧХ и ЛФЧХ пропорционального звена , где Т – постоянная времени (характеризует инерционность звена). Передаточная функция звена
, где Т – постоянная времени (характеризует инерционность звена). Передаточная функция звена  . Переходная функция звена
. Переходная функция звена  . Переходная характеристика (рис. 6.2а) изменяется по экспоненциальному закону. Выходная величина звена достигает своего установившегося значения не сразу, а постепенно, через t=(3÷4)T. В этом проявляется инерционность звена. Поэтому это звено иногда называют инерционным.
. Переходная характеристика (рис. 6.2а) изменяется по экспоненциальному закону. Выходная величина звена достигает своего установившегося значения не сразу, а постепенно, через t=(3÷4)T. В этом проявляется инерционность звена. Поэтому это звено иногда называют инерционным. б)
б) 
 , т.е. убывает по экспоненциальному закону
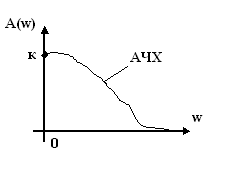
, т.е. убывает по экспоненциальному закону . АФЧХ звена в комплексной плоскости представляется полуокружностью с диаметром, равной передаточному коэффициенту звено К. Центр окружности лежит в точке (К/2, 0). Модуль КПФ
. АФЧХ звена в комплексной плоскости представляется полуокружностью с диаметром, равной передаточному коэффициенту звено К. Центр окружности лежит в точке (К/2, 0). Модуль КПФ  , т.е с увеличением частоты амплитуда выходного сигнала убивает АЧХ и ФЧХ звена
, т.е с увеличением частоты амплитуда выходного сигнала убивает АЧХ и ФЧХ звена 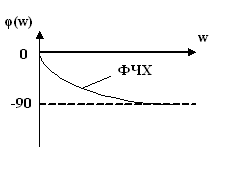
 . С увеличением частоты сдвиг фаз между входными и выходными колебаниями увеличивается, достигая в пределе к –90°. Выражения ЛАЧХ звена
. С увеличением частоты сдвиг фаз между входными и выходными колебаниями увеличивается, достигая в пределе к –90°. Выражения ЛАЧХ звена  ; Для области низких (ω«1/T) и высоких (ω»1/T) частот выражения для L(ω) может быть упрощено: L (ω) = 20 lg к, при ω<<1/T. L (ω) = 20 lg к – 20 lg ω*Т, при ω>>1/T. ЛАЧХ звена в области низких частот представляет прямую АС, параллельное оси частот (асимтота точкой ЛАЧХ в области низких частот). ЛАЧХ в области высоких частот представляет прямую СВ с наклоном – 20 дб/дек (асимтота точкой ЛАЧХ в области высоких частот). Пересечение асимтот происходит при частоте ω с =1/Т и называется частотой сопряжения (рис. 9.4 а). ЛФЧХ звена при увеличении частоты по абсолютной величине увеличивается и стремится к – 90°.
; Для области низких (ω«1/T) и высоких (ω»1/T) частот выражения для L(ω) может быть упрощено: L (ω) = 20 lg к, при ω<<1/T. L (ω) = 20 lg к – 20 lg ω*Т, при ω>>1/T. ЛАЧХ звена в области низких частот представляет прямую АС, параллельное оси частот (асимтота точкой ЛАЧХ в области низких частот). ЛАЧХ в области высоких частот представляет прямую СВ с наклоном – 20 дб/дек (асимтота точкой ЛАЧХ в области высоких частот). Пересечение асимтот происходит при частоте ω с =1/Т и называется частотой сопряжения (рис. 9.4 а). ЛФЧХ звена при увеличении частоты по абсолютной величине увеличивается и стремится к – 90°.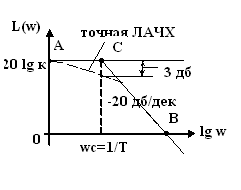 б)
б) 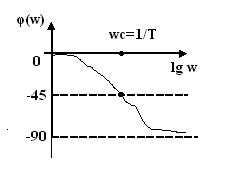
 . Уравнение можно представить и в таком виде
. Уравнение можно представить и в таком виде  , т.е. скорость выходной величины пропорционально входной величине.
, т.е. скорость выходной величины пропорционально входной величине.
 , (12.5)
, (12.5) (12.6)
(12.6)


