Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
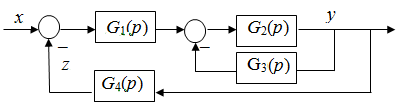
Структурная схема электромеханической следящей системы
Электромеханическая система (рис. 2.20) состоит из усилителя, двигателя постоянного тока и вала нагрузки, связанного с ротором двигателя через редуктор. Усилитель имеет "электрическую природу", редуктор и вал нагрузки - "механическую", электродвигатель - "электромеханическую".
Рис. 2.20. Электромеханическая следящая система Построим математическую модель системы. Эта модель включает уравнения отдельных элементов и уравнения взаимосвязей между ними. Уравнения отдельных элементов системы: 1) уравнение усилителя: u вых = k у u вх, где u вх, u вых – напряжения на входе и выходе усилителя; k у – коэффициент усиления усилителя. 2) уравнение баланса напряжений в якорной цепи двигателя:
где L, R – индуктивное и активное сопротивления якорной цепи; u д, I – напряжениe на входе двигателя и ток в цепи; e – противоЭДС; p – оператор Лапласа. 3) уравнение баланса моментов сил на валу двигателя:
где J д – момент инерции вала двигателя; jд – угол поворота вала двигателя; M д – движущий момент (момент двигателя); M 1 – момент противодействия со стороны вала нагрузки. 4) уравнение баланса моментов сил на валу нагрузки
где J н – момент инерции вала нагрузки; j – угол поворота вала нагрузки; 5) уравнение редуктора M 2 = c (jд / i – j); M 1 = M 2 / i, где c – жесткость редуктора, приведенная к выходной ступени; 6) закон управления u вх = G 0(p) Dj(t), где Dj(t) = j*–j – ошибка, отклонение j(t) от заданной (желаемой) траектории j*(t) движения вала нагрузки; G 0(p) – передаточная функция, определяющая закон управления. Взаимосвязи между отдельными элементами: 7) выходное напряжение усилителя является напряжением питания двигателя: u д = u вых. 8) ток в цепи якоря двигателя вызывает движущий момент, приложенный к ротору двигателя: M д = cм I, где cм – коэффициент момента. 9) при вращении ротора в магнитном поле в его обмотке наводится ЭДС, пропорциональная скорости вращения:
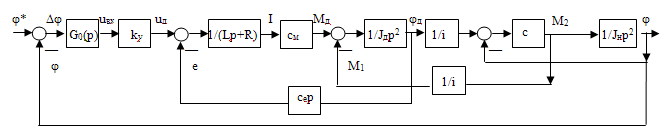
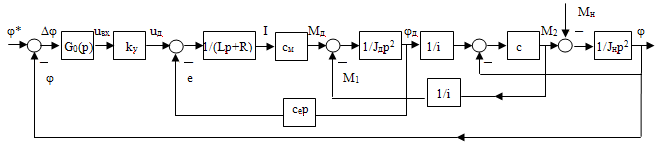
где cе – коэффициент ЭДС. Приведенные соотношения позволяют формально построить структурную схему (рис. 2.21). Для этого важно выделить входные воздействия (в нашем случае это j* и M н), выразить все необходимые промежуточные переменные и, главное, выходные сигналы (j) через передаточные функции элементов, осуществляющих соответствующие взаимосвязи.
Рис. 2.21. Структурная схема электромеханической следящей системы Важно отметить, что звенья на структурной схеме не обязательно сопоставляются с определенными физическими элементами (одно звено может описывать несколько реальных элементов или несколько звеньев – один физический элемент системы). Часть звеньев может отражать физические взаимодействия между элементами, отличающиеся от структурных связей между звеньями. Структурная схема – это отражение математического описания системы, лишь частично совпадающее с исходным разделением на физические элементы. Структурные схемы используются для наглядного отображения взаимосвязей отдельных элементов САУ и для определения характеристик САУ. Для определения характеристик сложных систем, имеющих сложные структурные схемы, используют структурные преобразования. 2.3.2 Структурные преобразования Структурные преобразования – это способы построения эквивалентных характеристик, позволяющие представить сложную систему в более простом виде при сохранении суммарных характеристик системы в целом. Смысл структурных преобразований заключается в приведении структурной схемы к наглядному, удобному для дальнейшего анализа виду. Последовательное соединение звеньев
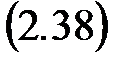
Рис. 2.22. Схема замещения последовательного соединения звеньев Для левой схемы: U (p) = G 1(p) X (p), Y (p) = G 2(p) U (p) Þ Y (p) = G 2(p) G 1(p) X (p). Для правой схемы: Y (p) = G (p) X (p). Следовательно, G (p) = G 1(p) G 2(p). В общем случае последовательного соединения “ n ” звеньев:
Передаточная функция последовательного соединения звеньев равна произведению передаточных функций отдельных звеньев соединения. Параллельное соединение звеньев
Рис. 2.23. Схема замещения параллельного соединения звеньев Для левой схемы: Y 1(p) = G 1(p) X (p), Y 2(p) = G 2(p) X (p), Для правой схемы: Y (p) = G (p) X (p). Следовательно, В общем случае параллельного соединения “ n ” звеньев:
Передаточная функция параллельного соединения звеньев равна сумме передаточных функций отдельных звеньев соединения. Соединение с обратной связью
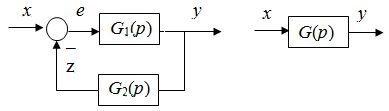
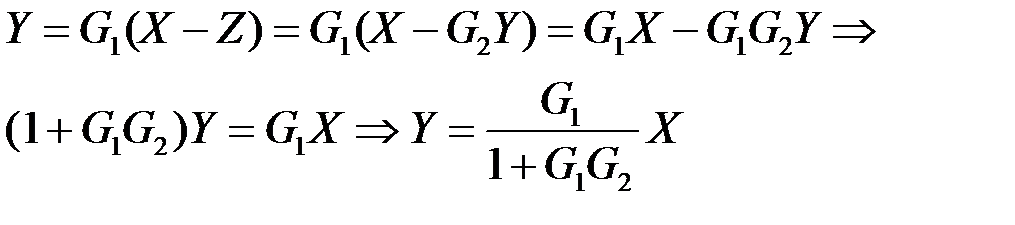
Рис. 2.24. Схема замещения соединения с обратной связью
Для соединения с положительной обратной связью
Выражение для передаточной функции от входного сигнала x к сигналу ошибки e при отрицательной обратной связи имеет вид
Общий случай одноконтурной системы
П’ Gi (p) – произведение передаточных функций только тех звеньев, которые расположены между интересующим входом и интересующим выходом. Многоконтурные системы Для многоконтурных систем используется принцип последовательного упрощения, заключающийся в замене части структурной схемы одним элементом. При определении передаточной функции такого элемента используются формулы элементарных структурных преобразований. Возможны два варианта: непересекающиеся (вложенные) контуры и пересекающиеся. В первом случае все достаточно ясно. Последовательно сворачивают внутренние контуры, заменяя внутренний контур одним звеном с эквивалентной передаточной функцией.
Рис. 2.26. Пример схемы с вложенным контуром В случае пересечения контуров их необходимо "развязывать" (избавляться от пересечений). Возможности для этого дают элементарные структурные преобразования: перенос линии связи за звено, перестановка сумматоров и т. п. Перемена местами линий связи
Рис. 2.27. Перемена местами линий связи Перемена местами сумматоров
Рис. 2.28. Перемена местами сумматоров Перенос линии связи за звено
Рис. 2.29. Перенос линии связи за звено Перенос сумматора за звено
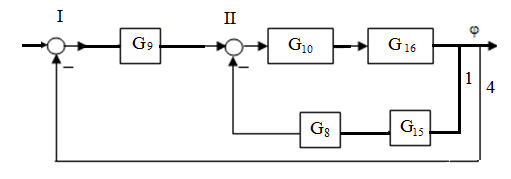
Рис. 2.30. Перенос сумматора за звено Пример. Структурные преобразования для ЭМС.
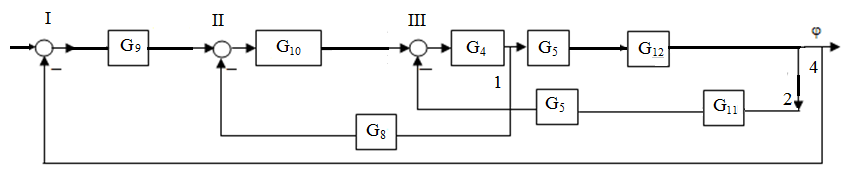
Рис. 2.31. Структурная схема ЭМС 1. Для определения передаточной функции оставляем только одно интересующее нас входное воздействие (например, для определения G j/j*(p) оставляем только j*), остальные убираем.
2. Для удобства перерисовываем схему
3. Заменяем последовательно соединенные звенья: G0 и G1 – на G9 = G0×G1, G2 и G3 – на G10= G2×G3.
4. Переносим линию связи 2 за звено G7 (появляется звено G11=1/G7), меняем местами линии связи 2 и 3.
5. Сворачиваем контур с сумматором IV: G12=G6G7(1+G6G7).
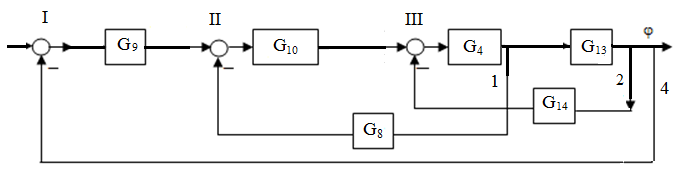
6. Заменяем последовательно соединенные звенья: G5 и G12 – на G13, G5 и G11 – на G14.
7. Переносим линию связи 1 за звено G13 (G15=1/ G13), меняем местами линии связи 1 и 2.
7. Сворачиваем контур с сумматором III: G16=G4G13/(1+G4G13G14).
8. Сворачиваем контур с сумматором II: G17=G10G16/(1+G10G16G8G15). 9. Искомая передаточная функция равна G j/j*=G9G17/(1+G9G17).
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 491; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.142.173.40 (0.032 с.) |

 L pI + R I = u д – e,
L pI + R I = u д – e, J д p 2jд = M д – M 1,
J д p 2jд = M д – M 1, J н p 2j = M 2 – M н,
J н p 2j = M 2 – M н,







 Для соединения с единичной отрицательной обратной связью
Для соединения с единичной отрицательной обратной связью







 Рис. 2.25. Общий случай одноконтурной системы
Рис. 2.25. Общий случай одноконтурной системы