Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Датчик обратной связи (сенсор)
Датчики информации являются преобразователями параметров физических процессов в электрические сигналы. Датчики дают информацию о текущих значениях управляемых процессов - информационные сигналы, осуществляют, так называемую обратную, связь. Входом датчика обратной связи (ДОС, рис. 1.9) является выход объекта управления - y (t), выходом датчика - оценка выходной характеристики y Ù(t).
Рис. 1.9. Обозначение ДОС на структурной схеме Несовпадение y (t) и y ^(t) объясняется двумя причинами: погрешностью датчика и изменением типа сигнала (например, механического перемещения в электрическое напряжение). Датчик называется идеальным, если его сигнал прямо пропорционален измеряемой величине. Все реальные датчики не являются идеальными: Примеры датчиков 1. Датчик относительного перемещения Измерительный потенциометр (рис. 1.10)
а б Рис. 1.10. Датчик относительного перемещения: Напряжение u, снимаемое с движка потенциометра, пропорционально перемещению подвижного элемента датчика (движка) относительно средней точки (корпуса). Движок связан с одним из тел, а корпус – с другим. Индуктивный датчик (рис. 1.11) представляет собой дифференциальный трансформатор с двумя встречно направленными вторичными обмотками. Если сердечник расположен в середине между обмотками, суммарное напряжение их равно нулю. Если сердечник перемещается, разностное напряжение поступает на вход фазочувствительного выпрямителя.
Рис. 1.11.Индуктивный датчик относительного перемещения 2. Датчик угловой скорости – тахогенератор (рис. 1.12).
Рис. 1.12. Тахогенератор Тахогенератор представляет собой генератор постоянного тока. ЭДС, вырабатываемая генератором, пропорциональна угловой скорости вращения ротора, механически соединяемого с телом, скорость которого необходимо измерить. 3. Датчик давления – измерительная мембрана. Прогиб мембраны пропорционален давлению газа, действующему на ее поверхность. Мембрана – это преобразователь "давление ® перемещение" p ®D x (а перемещение можно затем преобразовать в электрический сигнал).
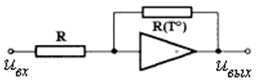
4. Датчик температуры: термистор, термопара. Действие термистора (рис. 1.13) связано с зависимостью его электрического сопротивления от температуры, действие термопары — со свойством разнородных проводников образовывать в спае электродвижущую силу (ЭДС), зависящую от температуры спая.
Рис. 1.13. Термистор 5. Датчик механических напряжений – тензометр. Тензометры используются для измерения малых деформаций упругих структур. Тензометрический элемент содержит тонкую проволоку на подложке, наклеенной на контролируемую конструкцию. При деформации конструкции изменяются ее геометрические размеры; при этом изменяется длина, а значит и электрическое сопротивление проволоки тензометрического элемента, и соответственно регистрируемый сигнал. Управляющее устройство В управляющем устройстве (УУ, рис. 1.14) на основе информационных сигналов y ^(t) о состоянии объекта управления и априорной информации y *(t) о желаемых свойствах ОУ вырабатываются сигналы управления u (t).
Рис. 1.14. Обозначение управляющего устройства на структурной схеме Правило (алгоритм) преобразования информационных сигналов в сигналы управления называется законом управления. Одной из главных задач ТАУ как раз и является формирование законов управления. В качестве управляющих устройств используются программируемые контроллеры или компьютеры. Использование цифровых управляющих устройств в качестве блока САУ влечет за собой определенные особенности ввода и вывода информации. При вводе текущей информации электрические сигналы (аналогового типа) от датчика масштабируются с помощью усилителей к требуемому диапазону, затем преобразуются в АЦП в кодированную последовательность импульсов и вводятся в память. Результат обработки информации по соответствующим программам в виде цифрового кода поступает на ЦАП, на выходе которого формируется аналоговый сигнал соответствующего напряжения. Как правило, аналого-цифровой преобразователь (АЦП) — электронное устройство, преобразующее аналоговый сигнал (напряжение как непрерывную функцию времени) в двоичный цифровой код. Важными характеристиками АЦП являются разрешение и разрядность. Разрешение АЦП — минимальное изменение величины аналогового сигнала, которое может быть преобразовано данным АЦП. Обычно измеряется в вольтах, поскольку для большинства АЦП входным сигналом является электрическое напряжение. Разрешение напрямую зависит от разрядности АЦП.
Разрядность АЦП характеризует количество дискретных значений, которые преобразователь может выдать на выходе; измеряется в битах. Например, АЦП с разрядностью 8 бит, способен выдать 256 дискретных значений (0…255), поскольку 28 = 256. Разрешение по напряжению равно разности напряжений, соответствующих максимальному и минимальному выходному коду, деленной на количество выходных дискретных значений. Например, при диапазоне входных значений от −10 до +10 В и разрядности АЦП 14 бит (214 = 16384 уровней квантования) получаем разрешение по напряжению (10-(-10))/16384 = 20/16384 = 0,00122 В = 1,22 мВ. Цифро-аналоговый преобразователь (ЦАП) — устройство для преобразования цифрового (обычно двоичного) кода в аналоговый сигнал (ток или напряжение). Цифро-аналоговые преобразователи являются интерфейсом между дискретной (числовой) информацией и непрерывными (аналоговыми) сигналами. Наиболее важными характеристиками ЦАП являются разрядность и максимальная частота дискретизации. Разрядность определяет количество различных уровней выходного сигнала, которые ЦАП может воспроизвести. Задается в битах. Например, однобитный ЦАП способен воспроизвести два (21) уровня, а восьмибитный — 256 (28) уровней.Таким образом, количество уровней равно 2 в степени разрядность. Максимальная частота дискретизации — максимальная частота работы ЦАП, на которой он выдает корректный результат. В соответствии с теоремой Котельникова, для правильного воспроизведения аналогового сигнала из цифровой формы необходимо, чтобы частота дискретизации была, по крайней мере, в два раза выше максимальной частоты в спектре сигнала. Например, для воспроизведения всего слышимого человеком звукового диапазона частот, спектр которого простирается до 20 кГц, необходимо, чтобы звуковой сигнал был дискретизован с частотой не менее 40 кГц. Стандарт Audio CD устанавливает частоту дискретизации звукового сигнала 44,1 кГц, в компьютерных звуковых картах частота дискретизации составляет 48 кГц.
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 420; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.189.193.172 (0.005 с.) |