Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принципы программирования учпу. ( спрашиваем у сиротина, что он от нас хочет, Т. К. В конспекте этого нет)
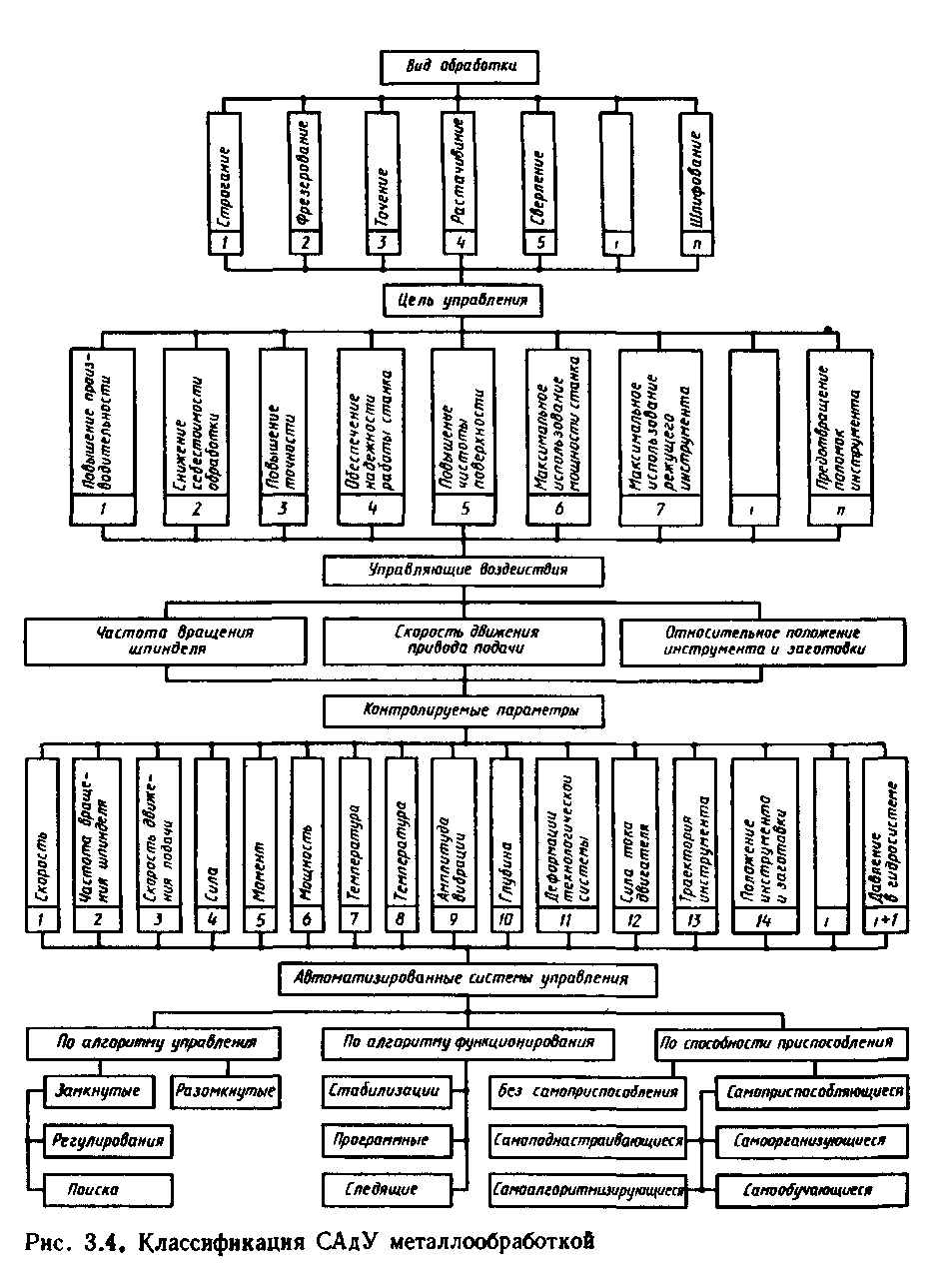
Сист ЧПУ может видоизмен в зависим от вида программоносителя, способа кодирования в управл проге, метода ее передачи в сист ЧПУ. УЧПУ размещ рядом со станками или непоср на станке. Дв-ли приводов подач, имеющ спец констр и работающ с конкретными (компрессными) УЧПУ яв-ся составной частью УЧПУ. Все данные необход для обраб на станке УЧПУ получает от управл проги. существ различн носители для записи управл прог. В основе записи управл прог код ИСО-7бит. Он предст собой 2-10 код с дополнит признаками. В кач-ве прог.-носителя м.б перфолента, магнитн лента., различн электр носители Адаптивные САУ. Адаптивные системы управления – системы автоматического управления у которых автоматически изменяются способ функционирования управляющей части для осуществления в каком-либо смысле наилучшего управления. Адаптивные системы управления делятся на: адаптивной системе функционального регулирования, где управляющее воздействие является функцией какого-либо параметра, адаптивной системе предельного регулирования, которая обеспечивает поддержание предельного значения одного или нескольких параметров в объекте. И адаптивной системе оптимального регулирования, в которой учитывается совокупность многих факторов с помощью комплексного критерия оптимальности. Протекание любого технологического процесса во времени в реальных условиях сопутствует действиям множества факторов, влияющих на его ход и имеющих чаще всего случайный характер. Определить процесс т.о., чтобы все факторы в любой момент времени были заранее учтены невозможно. Учет возникающих ситуаций с целью воздействия на процесс т.о., чтобы его ход отвечал задачам, которые решает этот процесс возможно только путем управления за счет оперативного вмешательства в процесс каждый раз, когда появляется тенденции к отклонению, или сами отклонения в ходе технологического процесса. Для учета влияющих факторов в структуру системы адаптивного управления включаются соответствующие датчики (первичные преобразователи). Система адаптивного управления механической обработкой можно строить на основе различных информационных признаков и структур управления. Классификацию систем адаптивного управления металлообработкой можно представить в следующем виде (рисунок).
Вид обработки строгание, фрезерование, точение, расстачивание, сверление, шлифование цель управления повышение производительности, снижение себестоимости обработки, повышение точности, обеспечение работы станка, повышение чистоты поверхности, максимальное использование мощности станка, максимальное использование режущих инструментов, предотвращение поломки инструмента управляющее воздействие частота вращения шпинделя, скорость движения привода подачи, относительное положение инструмента и заготовки контролируемые параметры давление в гидросистеме, скорость, частота вращения шпинделя, скорость движения подачи, сила, момент, мощность, температура, амплитуда вибраций, глубина, деформация технологической системы, сила тока двигателя, траектория инструмента, положение заготовки и инструмента автоматические системы управления по алгоритму управления (замкн., разомкн.), по алгоритму функционирования (стабилизации, программные, следящие), по способности приспособления (без самоприспособления, самоприспосабливающиеся (самоподнастраивающиеся, самоорганизующиеся, самоалгоритмизующиеся, самообучающиеся)) Целью управления при использовании системы адаптивного управления м.б.: повышение точности, производительности, улучшение параметров шероховатости и т. д. К режиму обработки часто предъявляют противоречивые требования. Как правило, невозможно получить решение одновременно удовлетворяющее всем требованиям. Текущую информацию о режиме обработки, состоянии параметров технологической системы и выработки сигналов управления получают с помощью сигналов от различных датчиков. Число датчиков определяется назначением системы адаптивного управления, количеством управляющих воздействий и поставленной целью управления. Адаптивные ПР отличаются, как правило,большим числом степеней подвижности, целенаправленным воздействием с реальной внешней средой на основе информации о ее состоянии. Управляющая программа адаптивного ПР не содержит полного набора необходимых информации. Ее недостающая часть формируется в процессе функционирования ПР на основе анализа выполняемых действий и контроля измеряемых параметров внешней среды, а также состояния узлов и подсистем ПР. Характер и структура этой информации определяется функциональным назначением производственной задачи и условиями работы, уровнем автономности действий ПР, требований ТБ. Отсюда следует, что возможности адаптации ПР определяются сложностью информационной системы и алгоритмов обработки информации. В свою очередь алгоритмы обработки определяют сложность используемых систем обработки (микропроцессоров, микроконтроллеров, ПЛК и т.д.)
|
||||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 135; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.104.248 (0.006 с.) |