Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Часть 1. Анализ объекта управления.
1. Постановка задачи________________________________________________________3 2. Математические модели объекта управления 2.1. Уравнения в переменных состояния_____________________________________4 2.2. Передаточная функция________________________________________________5 2.3. Весовая функция_____________________________________________________7 2.4. Уравнение вход-выход________________________________________________9 2.5. Частотные характеристики____________________________________________10 3. Свойства системы 3.1. Устойчивость_______________________________________________________12 3.2. Анализ минимальнофазовости объекта_________________________________13 3.3. Исследование управляемости и наблюдаемости_________________________14 3.4. Анализ установившихся режимов______________________________________17 3.5 Окончательный выбор параметров и его обоснование____________________18 4. Процессы в объекте управления 4.1. Импульсное воздействие_____________________________________________21 4.2. Ступенчатое воздействие_____________________________________________24 4.3. Гармоническое воздействие__________________________________________28 Часть 2. Синтез законов управления для систем с обратной связью. 1. Структурная схема системы с регулятором__________________________________31 2. Настройка контура управления____________________________________________32 3. Настройка контура оценивания____________________________________________35 4. Завершение построения системы__________________________________________38 5. Исследование системы при изменении параметров системы___________________40 6. Вывод_________________________________________________________________48 Приложение. М-файлы для MatLab________________________________________________________49 Корневой годограф__________________________________________________________52
Часть 1. Анализ объекта управления. Постановка задачи
В данной работе рассматривается модель развития многоотраслевой экономики В.В. Леонтьева в частном случае для двух отраслей.
Выбранные данные для модели:
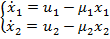
Математические модели объекта управления Уравнение в переменных состояния Вектор состояния представим в следующем виде:
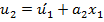
Тогда система линейных дифференциальных уравнений, описывающих систему, выглядит
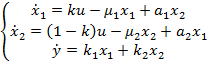
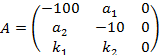
соответственно запишем следующие матрицы и векторы:
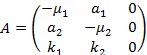
Передаточная функция Так как задача была уже ранее описана в переменных состояний, то сделаем переход по уже имеющейся математической формуле:
Передаточная функция, вычисленная при помощи символьной алгебры в MatLab по той же формуле, которая совпадает с найденной аналитически (М-файл №1 в приложении):
H = (k*(10*k1 + a2*k2 + k1*p))/(p*(p^2 + 110*p - a1*a2 + 1000)) - ((k - 1)*(100*k2 + a1*k1 + k2*p))/(p*(p^2 + 110*p - a1*a2 + 1000)) Очевидно из блок-схемы, что две другие передаточные функции, которые входят в состав уже имеющийся, могут быть представлены в виде:
Очевидно, выполняется равенство, которое следует из блок-схемы и структурных свойств систем управления:
Соответственно передаточную функцию можно определить двумя способами: по блок схеме, исходя из дифференциальных уравнений, связывающих информационные потоки, и свойств систем управления, а также «в лоб» по уже имеющимся переменным состояния.
Весовая функция Весовая функция определяется просто: как обратное преобразование Лапласа, от уже найденной передаточной функции, или как некоторое линейное преобразование от также заранее найденных переменных состояния (однако здесь требуется вычисление матричной экспоненты):
Я воспользуюсь при аналитическом решении данной задачи первым способом и буду искать обратное преобразование Лапласа от передаточной функции. Для упрощения введу некоторые обозначения - это коэффициенты числителя и два корня квадратного уравнения знаменателя, взятые с обратными знаками:
Тогда передаточная функция примет более простой вид, который можно с легкостью разложить по элементарным дробям:
Для которой, обратное преобразование Лапласа можно провести с помощью таблицы:
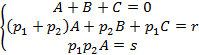
И задача сводится к определению этих коэффициентов, которые легко находятся после приведения правой части формулы для передаточной функции к общему знаменателю и приравниванию коэффициентов перед р. Составляем систему алгебраических уравнений:
Решая систему, получаем соответственно следующие значения коэффициентов:
Из соображений компактности и читабельности формулы не будем, подставлять значения коэффициентов, а будем считать их константами, которые определяются значениями коэффициентов перекрестных связей и коэффициента усиления.
Результат, который получается при использовании символьной алгебры MatLab (обратное преобразование Лапласа, в случае с вычислением через переменные состояния ответ получается слишком некомпактным, поэтому здесь не приведен): h = ((cosh(t*(a1*a2 + 2025)^(1/2)) + (sinh(t*(a1*a2 + 2025)^(1/2))*((10000*k2 + 110*a1*k1 + 100*k*k1 - 10000*k*k2 + a1*a2*k2 - 110*a1*k*k1 + 110*a2*k*k2 + a1*a2*k*k1 - a1*a2*k*k2)/(100*k2 + a1*k1 + 10*k*k1 - 100*k*k2 - a1*k*k1 + a2*k*k2) - 55))/(a1*a2 + 2025)^(1/2))*(100*k2 + a1*k1 + 10*k*k1 - 100*k*k2 - a1*k*k1 + a2*k*k2))/(exp(55*t)*(a1*a2 - 1000)) - (100*k2 + a1*k1 + 10*k*k1 - 100*k*k2 - a1*k*k1 + a2*k*k2)/(a1*a2 - 1000) В данном случае достаточно сложно сравнивать полученные результаты, так как в решении MatLab используются гиперболические функции. Поэтому я сделал проверку, подставив определенные численные значения (ненулевые, чтобы исключить случаи «зануления» частей уравнения) и сравнив их (М-файл №2 в приложении): h1 = 0.0217 h = 0.0217 hm= 0.0217
Где h1 – ответ, полученный аналитически h – ответ, полученный при обратном преобразовании Лапласа hm – ответ, полученный при вычислении через переменные состояния Что и следовало ожидать, ответы совпали, значит можно с определенной долей вероятности говорить о верности аналитического решения.
Уравнение вход-выход Обозначим числитель и знаменатель передаточной функции согласно формуле:
Тогда уравнение вход-выход запишется в следующем виде, если вместо переменной р подставить оператор дифференцирования по времени:
Частотные характеристики Для того чтобы найти частотные характеристики системы можно воспользоваться любой из ниже указанных формул, в зависимости от того, что уже известно передаточная функция, весовая функция, уравнение вход-выход или система уже описана в переменных состояния:
Лучше всего пойти самым простым способом и путем заменой переменной в передаточной функции найти искомую функцию, которую требуется представить в следующем виде:
Для простоты нахождения модуля и аргумента искомой функции будем рассматривать отдельно модули и аргументы числителя и знаменателя:
Для символьного решения посредством MatLab ограничимся вычислением частотных характеристик через переменные состояния, чтобы операции не сводились к простому переименованию переменных. По причине того, что действительные и мнимые части в символьной алгебре MatLab выделяются через сопряженные символьные числа, полученный ответ громоздок и не информативен, поэтому как и в предыдущем подразделе проведем только проверку между аналитическим и символьным расчетом в MatLab, при фиксированных значениях параметров (М-файл №3 в приложении):
H =- (k*(10*k1 + a2*k2 + k1*w*i))/(w*(w^2*i + 110*w + a1*a2*i - 1000*i)) + ((k - 1)*(100*k2 + a1*k1 + k2*w*i))/(w*(w^2*i + 110*w + a1*a2*i - 1000*i))
modh = 0.0107 modh1 = 0.0107 argh = -1.7168 argh1 = -1.7168 Ответы совпали, значит, аналитические вычисления верны.
Свойства системы Устойчивость Найдем собственные числа матрицы А (очевидно это корни знаменателя передаточной функции)
Отсюда видим, что имеется 3 собственных числа, из которых одно нулевое, а 2 других зависят от перекрестных связей Для того, чтобы удовлетворить условию Стодолы, которое является в нашем случае не только необходимым условием, но и достаточным, потребуем следующее:
1.
2.
Корневой годограф (см. Приложение).
|
|||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 226; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.137.243 (0.059 с.) |