Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Пуск двигателей постоянного тока
Наиболее распространенными являются следующие способы пуска двигателей постоянного тока: прямой, при котором обмотка якоря непосредственно подключается к источнику постоянного напряжения: реостатный с помощью пускового реостата, который включается в цепь якоря, а также пуск при пониженном напряжении, подводимом к якорю. В двигателях постоянного тока падение напряжения в цепи якоря обычно не превышает 5... 10 % от номинального напряжения. Поэтому при прямом пу ске ток в якоре превышает номинальное значение в 10... 15 раз. Подобное увеличение силы тока недопустимо ни для сети, питаюшей двигатель, ни для коллектора и обмотки, ни для рабочего механизма, с которым соединен вал якоря. По этой причине прямой пуск применяется для двигателей, мощность которых не превышает 1 кВт. Наибольшее распространение получил реостатный пуск. Для ограничения пускового тока в цепь якоря двигателя включают пусковой реостат. Сопротивление пускового реостата рассчитывают из условия, чтобы пусковой ток не превышал 2-2,5 номинального значения. Следует помнить, что пусковой реостат предназначен для кратковременной работы. Поэтому по мере увеличения частоты вращения якоря сопротивление пускового реостата уменьшают. На крышке пускового реостата имеется указатель двух предельных режимов. Этим режимам соответствуют надписи "СТОП" и "ХОД". Надпись "СТОП" соответствует размыканию цепи обмотки якоря, что делает невозможным пуск двигателя. Надпись "ХОД" соответствует нулевому сопротивлению пускового реостата. В процессе пуска ручка пускового реостата плавно переводится из положения "СТОП" в положение "ХОД". Пуск происходит быстро и легко, если двигатель развивает пусковой момент. превышающий момент сопротивления на валу. Поэтому пуск производят при максимальном магнитном потоке. С этой целью перед пуском двигателя сопротивление в цепи обмотки возбуждения рекомендуется полностью вывесОграничение пу скового тока достигается также в случае пуска при пониженном напряжении, подводимом к якорю двигателя от источника с регулируемым напряжением. Механическая характеристика двигателя постоянного тока п способы регулирования его частоты врашения Зависимость установившейся частоты врашения якоря от момента на валу- двигателя при постоянном напряжении и сопротивлении цепи якоря называется механической характеристикой двигателя. Для получения уравнения механической характеристики запишем выражение второго закона Кирхгофа для цепи якоря: где индуктируемая в обмотке якоря. С учетом ее значения уравнение, записанное относительно частоты вращения. примет вид Из уравнения следует, что регулировать частоту7 врашения двигателя можно тремя способами:
1) включением дополнительного сопротивления в цепь обмотки якоря (реостатное регулирование); 2) изменением магнитного потока (полюсное регулирование); 3) изменением питающего напряжения (якорное регулирование).
Рассмотрим эти способы регулирования на примере двигателей постоянного тока с параллельным и независимым способами возбуждения (как получивших наибольшее распространение при постоянном моменте нагрузки на валу. При отсутствии дополнительного сопротивления в цепи якоря и номинальных значениях магнитного потока обмотки возбуждения и напряжения механическая характеристика имеет вид прямой линии, наклоненной к оси абсцисс. Такая механическая характеристика называется естественной. Это очень пологая прямая. Уменьшение частоты вращения не превышает 6...7 % от номинального значения и обусловлено, главным образом, наличием внутреннего сопротивления обмотки якоря. Включение дополнительного сопротивления в цепь якоря позволяет получить семейство искусственных механических характеристик. Все эти характеристики расположены ниже естественной. Реостатный способ регулирования находит широкое применение, так как позволяет получить любую пониженную частоту врашения при заданном моменте нагрузки на валу. К недостаткам данного способа относятся: 1) трудность поддержания частоты врашения при изменении момента нагрузки: 2) дополнительные потери мощности на регулировочном реостате, включенном в цепь обмотки якоря. Изменение сопротивления в цепи обмотки возбуждения (полюсное регулирование) позволяет варьировать частоту вращения двигателя обратно пропорционально величине магнитного потока. Это обстоятельство следует иметь в виду, не допуская чрезмерного уменьшения тока в обмотке возбуждения. Одним из преимуществ полюсного регулирования является его экономичность. так как ток возбуждения в рассматриваемых двигателях не превышает 10 % от номинального значения тока якоря. Другим преимуществом этого способа является достаточно жесткие механические характеристики, т. е. изменение частоты вращения, не превышающее 5 % номинального значения во всем диапазоне работы двигателя. Недостатком полюсного регулирования является то. что изменение магнитного потока можно производить лишь в области, расположенной ниже естественной механической характеристики, тогда как чаще требуется понижение частоты вращения. Якорное регулирование за счет изменения величины подводимого напряжения применяется, главным образом, в двигателях с независимым возбуждением. Пусковой реостат в этом случае не требуется, так как пуск начинается при пониженном напряжении, которое можно плавно повысить. Для изменения направления врашения двигателя необходимо изменить направление тока в обмотке возбуждения или полярность приложенного напряжения. Одновременное изменение двух указанных параметров не изменяет направление вращения якоря.
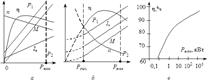
15,16,17 Рабочие характеристики ДПТ называют зависимости КПД η, тока Iя, момента M, частоты n, подводимой мощности P1 от полезной мощности P2. Важнейшим энергетическим показателем машины постоянного тока является КПД η = P2/P1. КПД зависит от величины потерь мощности ΔP = P1 – P2. Потери мощности слагаются из следующих основных видов: 1) потери в обмотке якоря ΔP = RяIя2; 2) потери в стали ΔPс, вызываемые вихревыми токами и перемагничиванием якоря при его вращении; 3) механические потери ΔPм от трения в подшипниках, щеток о коллектор, якоря о воздух; 4) потери в обмотке возбуждения ΔPв = RвIв2.
На рис., а приведены рабочие характеристики ДПТ параллельного возбуждения, а на рис. б – последовательного. Последние характеристики в опасной для двигателя зоне малых нагрузок 0¸Pmin показаны пунктиром. КПД машин постоянного тока растет с увеличением номинальной мощности (в)
|
||||||
|
|
Последнее изменение этой страницы: 2016-07-16; просмотров: 410; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.188.108.54 (0.006 с.) |