
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принцип действия машин постоянного токаСтр 1 из 4Следующая ⇒
Электродвижущая сила машины постоянного тока Если якорь машины постоянного тока приводится во вращение каким-либо двигателем (режим генератора) или собственным вращающим моментом (режим двигателя), его обмотка, будет пересекаться магнитным потоком индуктора и в каждом ее стержне будет наводиться э. д. с. e. По закону электромагнитной индукции величина этой э. д. с. будет равна потоку, пересекающему стержень за 1 сек. Каждая пара полюсов индуктора создает в машине магнитный поток Ф, который замыкается через сталь барабана якоря, дважды преодолевая воздушный зазор между индуктором и якорем. Магнитные линии этого потока за один оборот якоря дважды пересекают все проводники обмотки якоря. Следовательно, в машине с числом полюсов 2p каждый проводник (активная сторона секции) обмотки якоря за один оборот пересечет 2p Ф магнитных силовых линий. Если якорь совершает nоборотов в минуту, то э. д. с. в одном стержне
Если через а обозначить число пар параллельных ветвей в обмотке якоря, а через N – общее число стержней (активных сторон секций) обмотки, то в каждой из ветвей будет соединено последовательно Следовательно, э. д. с. на щетках машины представится выражением:
или
где постоянный коэффициент Таким образом, э. д. с. машины постоянного тока пропорциональна магнитному потоку индуктора и скорости вращения якоря. Для изменения направления (знака) э. д. с. на щетках, необходимо изменить знак магнитного потока индуктора или направление вращения якоря. Обычно меняют направление потока Ф, для чего изменяют направление тока в обмотке возбуждения индуктора. Электромагнитный момент и электромагнитная мощность При тех же предположениях, что и при определении Eа, электромагнитный момент машины
Подставим сюда
Тогда
Если выразить сумму в этом выражении, как и выше, через Bср и Фδ, то в окончательной форме получим
причем постоянный для каждой данной машины коэффициент cм определяется равенством (7). Сделанные выше замечания о влиянии формы кривой поля, шага обмотки, скоса пазов и сдвига щеток с нейтрали действительны и для данного случая. Момент в системе СИ получается в ньютон-метрах (Н × м). При необходимости выразить момент в килограмм-метрах (кгс × м) надо результат разделить на 9,81.
Отметим, что выражение (8) с учетом равенства (7) можно представить также в виде
откуда следует, что момент пропорционален потоку всех полюсов (2p × Фδ) и току всех проводников якоря Из соотношений (6) и (8) вытекают также два равноценных выражения для электромагнитной мощности:
При выводе формул э. д. с. и момента предполагалось, что проводники обмотки расположены на гладкой поверхности якоря. В действительности проводники находятся в пазах, где магнитная индукция ослаблена. Однако полученные формулы справедливы и в этом случае, так как э. д. с. и момент определяются значением потока, сцепляющегося с секциями обмотки. При расположении проводников в пазах механические усилия действуют главным образом не на проводники обмотки, а на зубцы якоря.
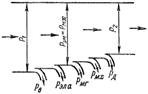
Энергетическая диаграмма
Энергетическая диаграмма двигателя параллельного возбуждения изображена на рисунке 1. Первичная мощность P1является электрической и потребляется из питающей сети. За счет этой мощности покрываются потери на возбуждения pв и электрические потери pэла = Iа² × Rа в цепи якоря, а оставшаяся часть составляет электромагнитную мощность якоря Pэм = Eа × Iа, которая превращается в механическую мощность Pмх. Потери магнитные pмг, добавочные pд, и механические pмх покрываются за счет механической мощности, а остальная часть этой мощности представляет собой полезную механическую мощность P2 на валу. Аналогичные энергетические диаграммы, иллюстрирующие преобразование энергии в двигателе, можно построить и для других типов двигателей. Реакция якоря В процессе работы нагруженного синхронного генератора в нем одновременно действуют МДС возбуждения Fв0 и якоря F1, при этом МДС якоря воздействует на МДС возбуждения, усиливая или ослабляя поле возбуждения или же искажая его форму. Воздействие МДС обмотки якоря на МДС обмотки возбуждения называется реакцией якоря. Реакция якоря оказывает влияние на рабочие свойства синхронной машины, так как изменение магнитного поля в машине сопровождается изменением ЭДС, наведенной в обмотке статора, а следовательно, изменением и ряда других величин, связанных с этой ЭДС. Влияние реакции якоря на работу синхронной машины зависит от значения и характера нагрузки.
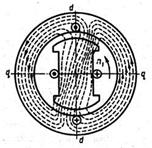
Синхронные генераторы, как правило, работают на смешанную нагрузку (активно-индуктивную или активно-емкостную). Но для выяснения вопроса о влиянии реакции якоря на работу синхронной машины целесообразно рассмотреть случаи работы генератора при нагрузках предельного характера, а именно: активной, индуктивной и емкостной. Воспользуемся для этого векторными диаграммами МДС. При построении этих диаграмм следует иметь в виду, что вектор ЭДС Е0, индуцируемой магнитным потоком возбуждения в обмотке статора, отстает по фазе от вектора этого потока (а следовательно, и вектора МДС Fв0) на 90°. Что же касается вектора тока в обмотке статора I1, то он может занимать по отношению к вектору Е0 различные положения, определяемые углом y1, в зависимости от вида нагрузки. Активная нагрузка (y1 = 0). На рис. 20.5, а представлены статор и ротор двухполюсного генератора. На статоре показана часть фазной обмотки. Ротор явнополюсный, вращается против движения часовой стрелки. В рассматриваемый момент времени ротор занимает вертикальное положение, что соответствует максимуму ЭДС Е0 в фазной обмотке. Так как ток при активной нагрузке совпадает по фазе с ЭДС, то указанное положение ротора соответствует также и максимуму тока. Изобразив линии магнитной индукции поля возбуждения (ротора) и линии магнитной индукции поля обмотки статора, видим, что МДС статора F1 направлена перпендикулярно МДС возбуждения Fв0. Этот вывод также подтверждается векторной диаграммой, построенной для этого же случая. Порядок построения этой диаграммы следующий: в соответствии с пространственным положением ротора генератоpa проводим вектор МДС возбуждения Fв0; под углом 90° к этому вектору в сторону отставания проводим вектор ЭДС Е0, наведенной магнитным полем возбуждения в обмотке статора; при подключении чисто активной нагрузки ток в обмотке статора I1 совпадает по фазе с ЭДС Е0, а поэтому вектор МДС F1, создаваемый этим током, сдвинут в пространстве относительно вектора Fв0 на 90°.
Рис. 20.5. Реакция якоря синхронного генератора при активной (а), индуктивной (б) и емкостной (в) нагрузках Такое воздействие МДС якоря F1 на МДС возбуждения Fв0 вызовет искажения результирующего поля машины: магнитное поле машины ослабляется под набегающим краем полюса и усиливается под сбегающим краем полюса (рис. 20.6).
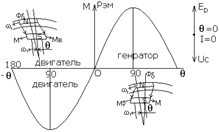
Угловая характеристика Синхронная машина обратима, т.е. можно работу синхронного генератора перевести в режим двигателя. При этом угол θ (если для генератора его считать положительным) изменит свой знак. Выражение электромагнитной мощности и момента для синхронного двигателя аналогичны генератору. На рис. 40 представлены угловые характеристики для неявнополюсной машины режима генератора и двигателя.
Рис. 40. Как было указано выше, если машина работает в режиме генератора, то под действием момента турбины Мт угол θ (угол между осью индуктора и осью результирующего потока Фδ) возрастает. Электромагнитный момент – тормозной. Ось индуктора опережает ось потока Фδ, и угол θ считается положительным. Если разгрузить генератор до θ=0, то напряжение генератора уравновешено ЭДС генератора и ток статора I=0. Если теперь нагрузить машину внешней нагрузкой, то машина перейдет в двигательный режим. При этом, электромагнитный момент будет движущим, а момент тормозной Мв – момент на валу. Как видим из рис. 40 при двигательном режиме результирующий поток Фδ будет тянуть за собой индуктор. Угол θ будет отрицательным. Двигатель будет работать устойчиво в диапазоне угла θ=0-900.
Уравнения электромагнитной мощности и момента неявнополюсного синхронного двигателя запишутся:
Работа синхронного двигателя в режиме угловых характеристик соответствует режиму: iB=const, M=var Потери и кпд Преобразование энергии в синхронных машинах связано с её потерями. Все виды потерь разделяют на основные и добавочные: 1) Основные потери Pо – это электрические потери в обмотке статора Pэ1, потери на возбуждение Pв, магнитные потери Pм1 и механические потери Pмех: Pо = Pэ1+Pв+Pм+Pмех. Электрические потери обусловлены нагревом обмоток статора, Pэ1 = m1×I²1×r1, где m1 – число ваз статора, I1 – ток статора, r1 – активное сопротивление фазы обмотки статора при рабочей температуре 75˚С. Потери на возбуждение в основном обусловлены нагревом в обмотке возбуждения, Pв = (I²в×rв)+(ΔUщ×Iв), где Iв – ток возбуждения, rв – активное сопротивление цепи возбуждения, ΔUщ – падение напряжения в щёточном контакте (≈2 В). Магнитные потери это потери в сердечнике статора на перемагничивание, Pм1 = Pг+Pв.т., где Pг – потери на гистерезис, Pв.т. – потери на вихревые токи. Механические потери это потери на трение в подшипниках, трение о воздух или другой охлаждающий газ и трение щёток о контактные кольца, Pмех ≈ 3,68(v2/40)ᵌ×ᵌ×l1, где v2 – окружная скорость на поверхности полюсного наконечника ротора, l1 – конструктивная длина сердечника статора. 2) Добавочные потери Pд – это потери в поверхностном слое ротора, вызванные пульсациями поля вследствие зубчатой поверхности статора и ротора Pп и потери, вызванные полями рассеивания Pр, Pд = Pп+Pр. Добавочные потери Pд в синхронных машинах при нагрузке определяют в процентах от подводимой мощности двигателей или от полезной мощности генераторов. Для машин мощностью до 1000 кВт Pд = 0,5%, а для машин мощностью более 1000 кВт – (0,25÷0,4)%.
Следовательно, суммарные потери в синхронной машине ∑P (кВт): ∑P = (Pо+Pд)/1000. КПД синхронного генератора ηг: ηг = 1-∑P/(Pн+∑P), где Pн – активная мощность, отбираемая от генератора в сеть или отбираемая двигателем от сети (кВт), Pн = (m1×U1н×I1н× cos φ1)/1000. КПД синхронного двигателя ηд: ηд = 1-∑P/Pн. КПД синхронной машины зависит от величины нагрузки, которая определяется коэффициентом нагрузки β, который определяется отношением отдаваемой или отбираемой машиной мощности P к номинальной мощности машины Pн (β = P/Pн) и от её характера (cos φ1). КПД синхронных машин мощностью до100кВт составляет (80÷90)%, у более мощных машин – (92÷99)%. Турбо- и гидрогенераторы мощностью в десятки и сотни тысяч киловатт имеют более высокие значения КПД. СИНХРОННЫЙ ДВИГАТЕЛЬ Принцип действия синхронного двигателя. Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя. Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток По обмотке ротора протекает ток возбуждения Iв, её МДС Fв создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления Мс. В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6). В двигательном режиме результирующий магнитный поток двигателя Фрезявляется ведущим; вращаясь, он увлекает за собой ротор, создавая вращающий момент Мдвигателя, преодолевающий тормозной момент Мс механической нагрузки. Уравнение второго закона Кирхгофа для обмотки статора. В двигательном режиме синхронная машина потребляет из сети ток Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
показывает, что противо-ЭДС Векторная диаграмма синхронного двигателя. Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол
Вектор тока Мощность и вращающий момент синхронного двигателя. Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок Механический момент на валу двигателя (4.5) где Угловая и механическая характеристики. Зависимость момента синхронной машины от угла нагрузки На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние. Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что Мс>Мmax, то угол нагрузки Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс. Регулирование коэффициента мощности синхронного двигателя. Синхронный двигатель в отличие от асинхронного обладает ценным для электроэнергетики свойством – он позволяет регулировать реактивную мощность, потребляемую из сети. Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна: Если в этих условиях изменять ток возбуждения, ЭДС обмоток статора При изменении тока возбуждения вектор Когда ток возбуждения двигателя мал (недовозбуждение), Наоборот, при перевозбуждении U – образные характеристики. Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0 P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой Наиболее экономичным для самого синхронного двигателя является режим работы с
Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол Синхронные компенсаторы. Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу. Пуск синхронного двигателя. Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора. Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора. Преимущества, недостатки и применение синхронных двигателей. Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc. Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью. Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя. Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т.п. Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
ВЫСОКОВОЛЬТНЫЕ АППАРАТЫ должны надежно работать при напряжении, на 5 - 15 % превышающем их номинальное напряжение. Это напряжение называется наибольшим рабочим напряжением аппарата. [1] Высоковольтные аппараты выбираются на основании сравнения каталожных данных с соответствующими расчетными данными, для чего составляется сравнительная таблица (ем. [2] Высоковольтный аппарат С-5 П - ВЭИ (рис. 66) предназначен для испытания электрической прочности витковой изоляции обмоток гидрогенераторов с многовитковыми секциями и обмоток высоковольтных электродвигателей в условиях эксплуатации, когда отсутствует возможность доступа к отдельным секциям. При ремонтах высоковольтных электродвигателей и гидрогенераторов на месте их эксплуатации аппарат может быть также использован для испытания витковой изоляции обмоток до и после укладки секций в пазы. [3] Высоковольтные аппараты распределительных и трансформаторных подстанций промышленных предприятий служат для оперативных изменений первичных схем коммутаций, а также для включения, отключения, защиты всей электроустановки или ее отдельных участков. В процессе работы токоведущие элементы аппаратов обтекаются током, а контакты при разрыве больших токов подвергаются воздействию высокой температуры дуги. При коротких замыканиях на вводы и контактную систему действуют значительные механические усилия, создаваемые электродинамическими нагрузками. Все это отрицательно отражается на состоянии отдельных частей и всего аппарата в целом. [4] Высоковольтные аппараты распределительных и трансформаторных подстанций промышленных предприятий служат для оперативных изменений первичных схем, коммутаций, а также для включения, отключения и защиты всей электроустановки или ее отдельных участков. [5] Каждый высоковольтный аппарат имеет в распределительном устройстве свое вполне определенное назначение Из его роли и места в схеме вытекают те требования, которым он должен удовлетворять. Комплекс всех предъявляемых к аппарату требований образует задание для его проектирования. [6] Некоторые высоковольтные аппараты, как, например, трансформаторы тока, трансформаторы напряжения и соленоидные приводы, имеют магнитную цепь. Трансформаторы тока и напряжения требуется строить так, чтобы при трансформации фактическое соотношение между токами, напряжениями и фазовыми углами в первичной и вторичной обмотках как можно меньше отличалось от номинального соотношения. Одним из средств для выполнения этого требования является такое устройство магнитопровода, при котором намагничивающий ток и ток, обусловленный потерями в магнитопроводе, составляли бы незначительную долю тока нагрузки. [7] У высоковольтных аппаратов, предназначенных для переключения цепей тяговых двигателей и вспомогательных машин, а также их защиты и имеющих подвижные детали, наиболее характерны следующие неисправности: электрические - подгар контактов и дугогасительных камер, пробой или перекрытие изоляции; механические - замедленное включение и отключение, поломка деталей, нарушение регулировки. [8] Испытание высоковольтного аппарата типа АМИ-60 производится после длительной эксплуатации или капитального ремонта и сводится к испытанию трансформатора в разобранном и в собранном виде. [9] В высоковольтных аппаратах применяются различные контактные узлы, однако все они делятся на два основных типа: на контактные соединения и контакты. [10] Широко применяются литые эпоксидные высоковольтные аппараты, как, например, кабельные концевые муфты и проходные втулки трансформаторов. [11] С помощью высоковольтных аппаратов изменяют схемы первичной коммутации, производят оперативные включения и отключения, осуществляют защиту электрического оборудования при нарушении заданных режимов работы электроустановки. [12] При испытании высоковольтных аппаратов возникает необходимость проверять их отключающую способность во всем диапазоне токов отключения - от малых, измеряемых несколькими десятками ампер, до предельных токов отключения. В соответствии с этим применяется ряд схем колебательного контура, которые позволяют регулировать отключаемый ток в требуемых пределах. [13] При расчетах высоковольтных аппаратов приходятся пользоваться обширным и разнообразным теоретическим и экспериментальным материалом. [14] В конструкциях высоковольтных аппаратов используются всевозможные газообразные, жидкие и твердые диэлектрики. Наиболее важным из газообразных диэлектриков является воздух. [15] НИЗКОВОЛЬТНОЕ ОБОРУДОВАНИЕ Низковольтное оборудование – это совокупность элементов электрической системы, которые служат для передачи и распределения электрической энергии. Главными элементами этой системы служат коммутационные аппараты, предназначенные для защиты и управления электроустановками. В настоящее время все низковольтные коммутационные аппараты размещаются в электрощитах, которые конструктивно полностью адаптированы для этой функции. Низковольтное оборудование взаимодействует со следующими исполнительными устройствами: электродвигатели, силовые и измерительные трансформаторы, насосы, обогревательные и осветительные приборы, телекоммуникационное оборудование и много других устройств. Низковольтное оборудование - это особый класс устройств и приборов для получения и передачи, конвертации и градации низковольтной электроэнергии. Приборы и устройства такого типа работают в сетях низкого напряжения до 1 кВ. К ним относят: устройства распределения электроэнергии, контрольно-измерительные приборы, автоматические реле и выключатели, пускатели и контакторы, устройства защиты, электрические счетчики и распределительные щиты. Почти все бытовые электрические приборы можно отнести к группе низковольтных устройств и оборудования. В последнее время набирают популярность комплексные интеллектуальные системы автоматизации всех электрических установок в здании, систем кондиционирования и вентиляции, безопасности и связи - это очень удобно, дает большую защиту и автономность использования, может обслуживаться одним человеком. К классу низковольтного оборудования относят: рубильники распределения энергоснабжением; распределительные шкафы и шкафы управления; водно-распределительные устройства; щитки осветительные, квартирные и этажные и т.п. Как правило, такого рода приборы оснащены светосигнальной арматурой, элементами управления и устройства учета и измерения энергоснабжения. применяются для автоматизации работы распределительного электрического оборудования и защиты конечных потребителей. Одно такое устройство может совмещать виды применяемых приборов и способы их компоновки.
|
|||||||||||||||
|
|
Последнее изменение этой страницы: 2016-07-16; просмотров: 84; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.77.71 (0.109 с.) |

 стержней.
стержней.










 . Ток
. Ток  и
и  .
. , которая направлена против напряжения сети
, которая направлена против напряжения сети  . Сумма ЭДС
. Сумма ЭДС  с учётом падения напряжения на активном сопротивлении обмотки статора
с учётом падения напряжения на активном сопротивлении обмотки статора  уравновешивает напряжение сети
уравновешивает напряжение сети  . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
. Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез. (рис.4.14,а).
(рис.4.14,а). , (4.4)
, (4.4)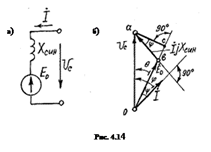
 от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС
от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС  отстает по фазе на угол
отстает по фазе на угол  . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол
. Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол  .
. , где
, где  — угол сдвига фаз между током и ЭДС.
— угол сдвига фаз между током и ЭДС. , где
, где  —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
—масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя .
. ,
, — угловая скорость ротора; Мтах =
— угловая скорость ротора; Мтах =  — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
— максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
 и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
 остаются неизменными (рис. 14.17).
остаются неизменными (рис. 14.17). , а, вследствие того, что
, а, вследствие того, что  , конец вектора тока
, конец вектора тока  =
=  , ток
, ток  отстаёт по фазе
отстаёт по фазе  от
от 
 и ток
и ток  является чисто активным.
является чисто активным. и вектор тока
и вектор тока  опережает по фазе вектор напряжения
опережает по фазе вектор напряжения  , ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при
, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при  .
. , левые ветви – перевозбуждённому двигателю и ёмкостному току.
, левые ветви – перевозбуждённому двигателю и ёмкостному току. (рис.4.17).
(рис.4.17). , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
, так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.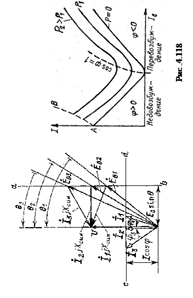
 с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip. следующим образом (рис. 4.19).
следующим образом (рис. 4.19). ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.


