Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Приведение движущих моментов к осям выходной платформы опу сасСодержание книги
Поиск на нашем сайте
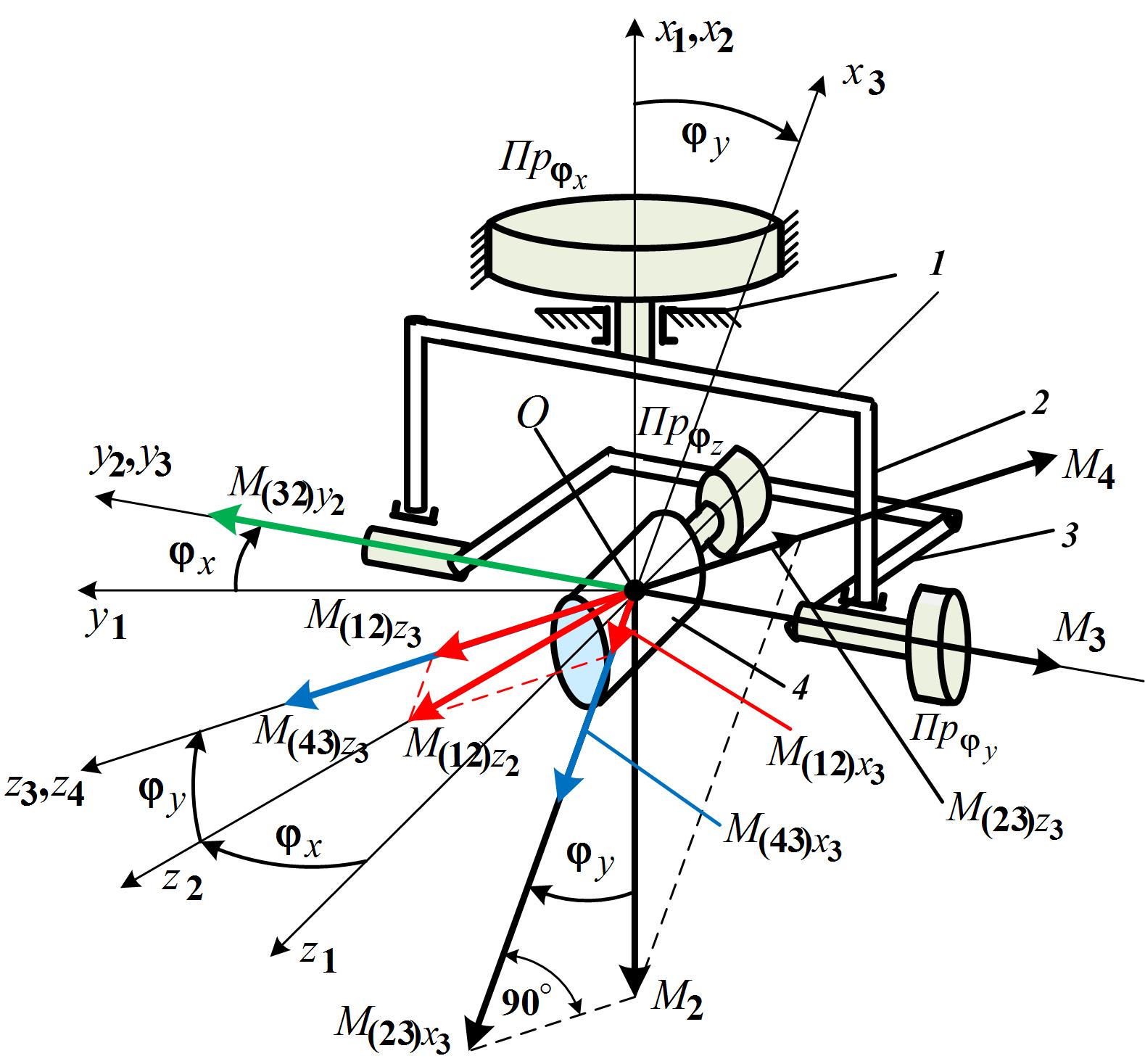
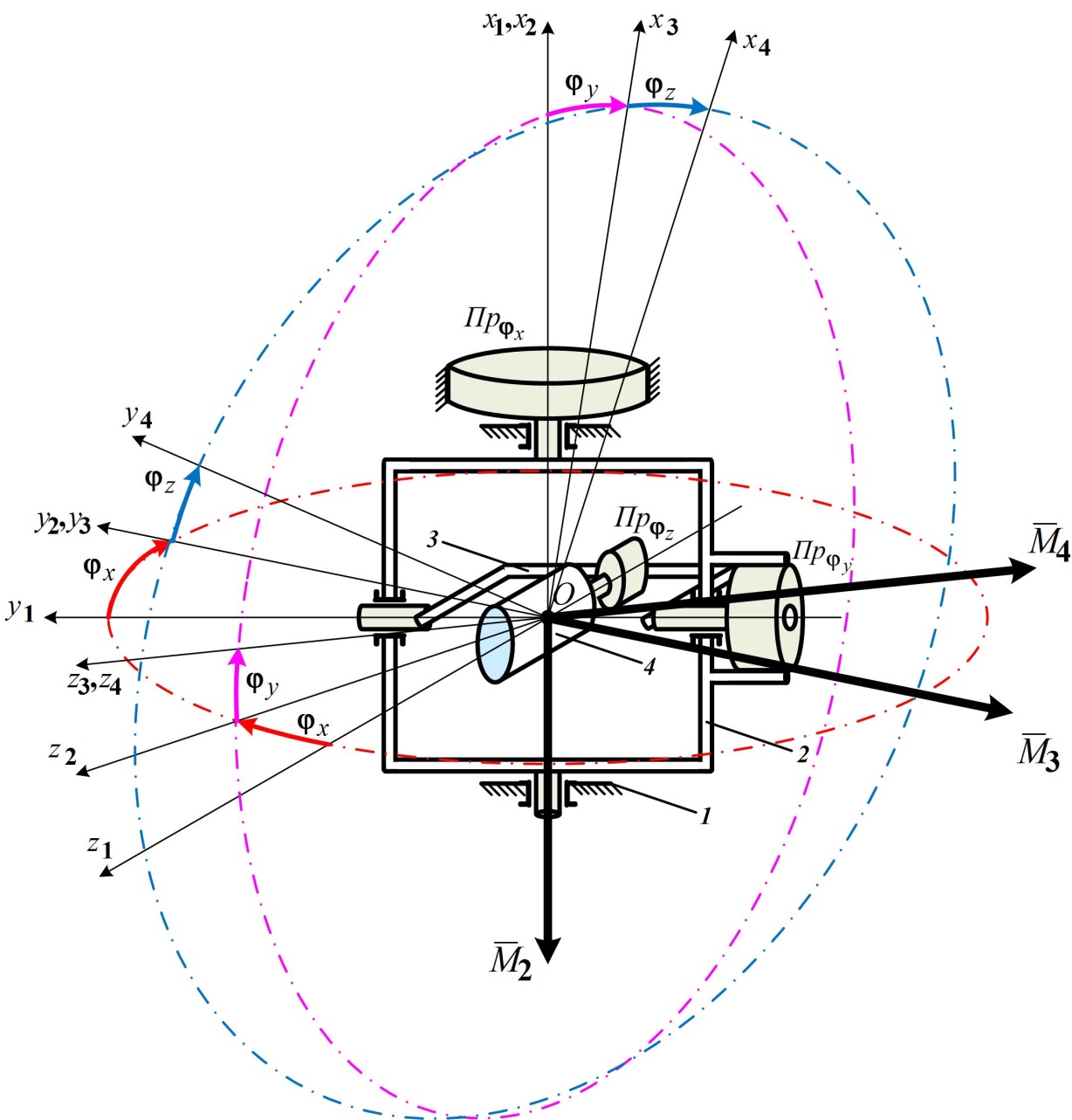
Определим векторно-матричную передаточную функции связи между входным вектором Положительным направлением действия момента будем считать такое, которое вызывает положительное направление вращения, другими словами, правило знаков для вращательных моментов такое же, как и для векторов угловых скоростей. Положительными считаются такие направления векторов моментов, которые совпадают с положительным направлением осей СК. В механической системе, показанной на рис. 17.8 с каждым из тел связана своя СК, начала которых расположены в общей точке (О), в исходном положении оси всех СК совпадают. Относительные углы поворота тел известны По-прежнему, для пассивного сопряжения и для активного (например, рассматривается безредукторный моментный двигатель), третий закон Ньютона остается в силе, поэтому движущий момент двигателя передается по кинематической цепи вперед, а равный ему реактивный момент, приложенный к статору моментного двигателя передается по кинематической цепи назад, создавая в каждом сочленении пару равных по величине и противоположно направленных моментов. Если все рамы подвеса ортогональны друг другу, то соответствующие оси различных базисов параллельны и движущие моменты приводов При углах, Кроме того, при ненулевых углах Будем рассматривать статическое положение всех платформ, когда приводы
Рис. 19.2 Считаем, что реакции в опорах лежат в плоскостях, перпендикулярных оси вращения. Рассмотрим равновесие платформы 3, на которую действуют моменты реакции как со стороны платформы 2, так и со стороны платформы 4. Данная ситуация показана на рис. 19.3, где приняты следующие обозначения:
Рис. 19.3
В результате схему равновесия платформы 3 можно изобразить, как показано на рис. 19.4.
Рис. 19.4
_____________________________
|
||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 306; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.11 (0.009 с.) |

 и выходным вектором
и выходным вектором  с учетом взаимодействия инерционных масс платформ ОПУ САС.
с учетом взаимодействия инерционных масс платформ ОПУ САС. ,
,  ,
,  . Поскольку принято допущение, что тела абсолютно жесткие, передача моментов происходит безынерционно и, в принципе, для пересчета вектора движущего момента из одного базиса в другой, достаточно знать матрицы связи базисов. Матрицы связи базисов, соответствующие избранному расположению осей вращения (последовательности поворотов на углы Эйлера
. Поскольку принято допущение, что тела абсолютно жесткие, передача моментов происходит безынерционно и, в принципе, для пересчета вектора движущего момента из одного базиса в другой, достаточно знать матрицы связи базисов. Матрицы связи базисов, соответствующие избранному расположению осей вращения (последовательности поворотов на углы Эйлера  ,
,  ,
,  ) показаны в [1].
) показаны в [1]. ,
,  ,
,  передаются на выходную платформу 4, так, что каждый из них создает движущий момент, действующий на платформу 4 только вдоль оси соответствующего привода. Составляющие пространственного вектора момента, действующего на платформу 4, представленные проекциями на оси СК Б4, связанной с платформой 4, в этом положении равны движущим моментам, развиваемым соответствующим двигателем. Моменты реакций от статоров моментных двигателей передаются через сочленения на основание (платформа 1) и в проекциях на оси СК Б1, также численно равны соответствующим моментам приводов.
передаются на выходную платформу 4, так, что каждый из них создает движущий момент, действующий на платформу 4 только вдоль оси соответствующего привода. Составляющие пространственного вектора момента, действующего на платформу 4, представленные проекциями на оси СК Б4, связанной с платформой 4, в этом положении равны движущим моментам, развиваемым соответствующим двигателем. Моменты реакций от статоров моментных двигателей передаются через сочленения на основание (платформа 1) и в проекциях на оси СК Б1, также численно равны соответствующим моментам приводов. ), так и моментами реакций между любыми смежными платформами (векторы
), так и моментами реакций между любыми смежными платформами (векторы  ,
,  ,
,  ).
).
 ‒ опора вала платформы
‒ опора вала платформы  , расположенная на платформе
, расположенная на платформе  ;
; ,
,  и
и  ‒ моменты, развиваемые приводами
‒ моменты, развиваемые приводами 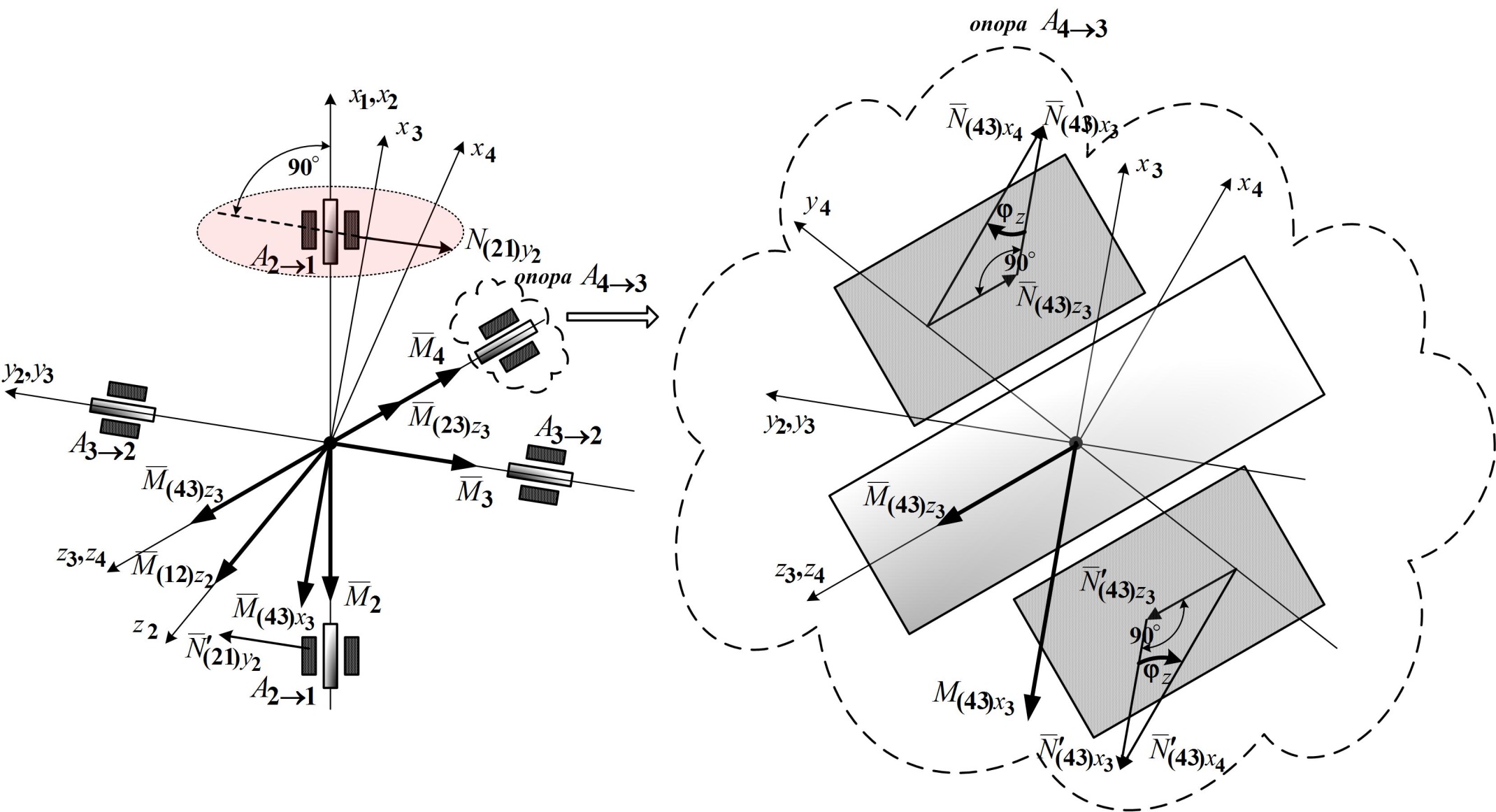
 ,
,  ‒ пара сил реакции в опорах
‒ пара сил реакции в опорах  , действующая со стороны платформы 1 (конструктивная база на борту КК) на платформу 2 вдоль оси
, действующая со стороны платформы 1 (конструктивная база на борту КК) на платформу 2 вдоль оси  , создающая момент реакции опор
, создающая момент реакции опор  вдоль оси
вдоль оси  ;
; ,
,  ‒ пара сил реакции в опорах
‒ пара сил реакции в опорах  , действующая со стороны платформы 4 (полезная нагрузка пеленгатора САС) на платформу 3 вдоль оси
, действующая со стороны платформы 4 (полезная нагрузка пеленгатора САС) на платформу 3 вдоль оси  ;
; ‒ составляющая момента реакции опор
‒ составляющая момента реакции опор  ;
; ,
,  ‒ пара сил реакции в опорах
‒ пара сил реакции в опорах  . Эта пара сил вызвана поворотом оси
. Эта пара сил вызвана поворотом оси  относительно оси
относительно оси  на угол
на угол  ;
; ‒ составляющая момента реакции опор
‒ составляющая момента реакции опор  ;
;