Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
С синхронным дискретным каналом
Общие положения. В последние годы все большее распространение получают системы ПДС с временным разделением каналов. При этом групповой канал является синхронным и возникает задача сопряжения источников дискретных сообщений с синхронным каналом. Задачу сопряжения выполняют устройства согласования передачи и приема СУпер и СУпр (рис. 2.4). Канал, образовавшийся в результате подключения к синхронному каналу согласующих устройств, назовем каналом ПДС. Сигнал на выходе источника дискретных сообщений может быть изохронным или анизохронным. Изохронные дискретные сигналы отличаются от анизохронных тем, что для них на приеме заранее известна структура и, в частности, моменты передачи единичных элементов. Изохронные сигналы, поступающие от источника, имеют длительность, кратную t0, и характеризуются скоростью телеграфирования Bи. Анизохронные сигналы могут иметь любую длительность, но не менее чем tmin. При этом максимальная скорость телеграфирования источника Bи=l/tmin<<Bс—скорости модуляции в синхронном канале. Основными характеристиками источника дискретных сообщений с дискретным синхронным каналом являются: коэффициент использования синхронного канала h, который будем определять отношением Ви/Вс, и сложность аппаратурной реализации. Согласование дискретных сигналов анизохронной структуры с синхронным каналом. Согласующее устройство на передаче обеспечивает преобразование исходного анизохронного сигнала в изохронный, на приеме осуществляется обратное преобразование. Таким образом, создается асинхронный канал ПДС. За возможность передавать по дискретному синхронному каналу сигналы анизохронной структуры приходится расплачиваться уменьшением коэффициента использования синхронного канала или в многоканальных системах—уменьшением числа дискретных асинхронных каналов по сравнению с исходным числом синхронных. В технике ПДС нашли применение два метода согласования сообщений анизохронной структуры с синхронным каналом: метод наложения и метод скользящего индекса с подтверждением. Метод наложения — наиболее простой из известных методов согласования сообщений анизохронной структуры с синхронным каналом. При этом методе согласования используется импульсная несущая, которая модулируется передаваемым сигналом, т. е. осуществляется амплитудно-импульсная модуляция.
Каждая посылка (рис.2.5,б) как бы накладывается на импульсную несущую (рис. 2.5,а). В результате в канал либо поступает пачка им пульсов несущей (рис. 2.5,в), если на нее накладывается токовая посылка, либо импульсы несущей в канал не проходят, если накладывается бестоковая посылка. В качестве модулятора можно использовать ключ, который управляется (отпирается или запирается) поступающими от источника анизохронными сигналами.
На приемной стороне каждая пачка импульсов несущей преобразуется в токовый элемент (посылку) соответствующей длительности (рис. 2.5,г). При воспроизведении элементов на приеме возникают краевые искажения, обусловленные тем, что источник сообщений и генератор импульсной несущей на передаче не синхронизированы. Эти искажения будут тем меньше, чем больше частота следования импульсов несущей, т. е. чем больше размещается импульсов несущей на интервале времени tmin. Очевидно, что при одной и той же частоте следования импульсов несущей величина искажений будет зависеть от скорости телеграфирования Ви. Величина искажений, %, определяется выражением
где
Пример 5. Пусть скорость модуляций импульсной последовательности в синхронном канале Вс=5000 Бод или 5000 имп./с, а допустимые искажения d=1%. Требуется определить максимально возможную скорость телеграфирования в асинхронном канале и коэффициент использования канала. Из формулы (2.3) имеем Bи=Bcd/100=50 Бод. Коэффициент использования синхронного канала h=0.01 В многоканальных системах необходима цикловая синхронизация (фазирование). Обычно для передачи специальных сигналов, по которым производится цикловая синхронизация, выделяется специальный канал. При этом скорость телеграфирования в синхронном канале, обеспечивающем передачу сигналов от N источников анизохронных сигналов с искажениями не более d%, Bc=Bn(N+1) 100/d. Так, при организации 12 телеграфных каналов со коростью передачи до 200 Бод и искажениями до 4% скорость передачи в синхронном (групповом) канале должна составлять Вс=200(12+1) 100/4==65*103 Бод. Такая скорость телеграфирования принята в аппаратуре ТВУ-12.
При согласовании методом наложения токовому элементу сигнала соответствует n=t/Dt импульсов несущей, где t—длительность посылки. При этом можно считать, что первый импульс несет информацию о передаче токового элемента, остальные (п— 1) импульсов являются импульсами подтверждения. Необходимость их передачи диктуется соображениями помехоустойчивости и желанием передать анизохронные сигналы с краевыми искажениями, не превышающими заданные. Коэффициент использования синхронного канала при методе наложения не превышает величины h =d/100. Для организации прозрачных (кодонезависимых) каналов с лучшим использованием пропускной способности синхронного канала при искажениях, не превышающих заданное значение, можно использовать метод, основанный на следующих соображениях. На приемный конец необходимо передать информацию о знаке посылки и местоположении ЗМ. При этом местоположение ЗМ можно задать с определенной точностью, которая будет определяться допустимыми индивидуальными краевыми искажениями. Если расстояние между импульсами несущей Dt, то при методе наложения, как известно, краевые искажения определяются формулой (9), т. е. зависят только от Dt и tmin. Если разбить интервал Dt на l зон и фиксировать попадание ЗМ в каждую из этих зон, то можно, передавая по каналу информацию о номере зоны, уменьшить искажения в l раз, т. е.
Если передавать информацию о номере зоны двоичным кодом, то потребуется k=log2l единичных элементов. Именно поэтому значение l выбирается кратным двум. Так, при l=2 на передачу информации о номере зоны потребуется один элемент (импульс несущей), а при l=4—два. Если после передачи информации о знаке посылки и номере зоны, в которую попал ЗМ, знак передаваемой посылки не изменился, то далее передается элемент или несколько элементов подтверждения, совпадающих с первым (стартовым) элементом. Описанный выше метод получил название метода скользящего индекса с подтверждением (СИП). При методе СИП величина искажений
Сравнивая (9) и (11) при заданных Ви и Вс, видим, что при использовании метода СИП удается уменьшить искажения в 2k раза при том же коэффициенте использования синхронного канала или при заданной величине искажений увеличить коэффициент использования синхронного канала в 2k раз по сравнению с методом наложения. При заданной величине искажений можно вычислить отношение Ви/Вс. Так, при d=8,33% это отношение для l=4 составляет 1/3. Откуда следует, что при d=8,33% для получения одного асинхронного канала требуется объединение трех синхронных. Недостатком метода СИП является размножение ошибок. Одиночная ошибка в синхронном тракте может вызвать несколько ошибок на приеме. Метод СИП используется в аппаратуре ДАТА, ДУМКА, ДАТА-2-7 и в аппаратуре ТВР. При этом кодирование номера зоны в современной аппаратуре (ДУМКА, ТВР) осуществляется в соответствии с рекомендациями МККТТ (табл. 2.7).
Таблица 2.7
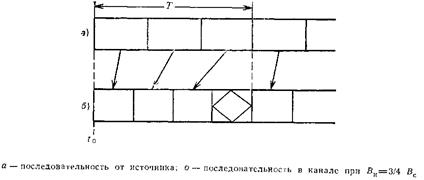
На рис. 2.6 показан процесс передачи и приема посылок при применении метода СИП и кодировании в соответствии с табл. 2.8. Передаваемая последовательность содержит токовую и бестоковую посылки (рис.2.6, а). Импульсы тактовой последовательности (рис.2.6 ,6) расположены друг от друга на расстоянии Dt и этот промежуток времени разбит на четыре зоны с номерами 1... 4. Первый ЗМ попадает в зону 2, второй ЗМ попада ет в зону 3. Эти зоны на рис. 2.6,б заштрихованы. В синхронный канал посылается кодовая комбинация 110, в которой первый элемент является стартовым, а два последующих уточняют местоположение 3M1. Для ЗМ2 в синхронный канал посылается комбинация 010 (рис. 2.6,а) и далее следуют импульсы подтверждения, совпадающие по знаку со стартовыми. На приеме (рис. 2.6,г) регистрируется посылка в соответствии с информацией, поступающей из канала.. Согласование дискретных сигналов изохронной структуры с синхронным каналом. Для сигналов изохронной структуры значащие моменты строго определены и необходима лишь привязка ЗМ сигналов, поступающих от источника, и ЗМ сигналов, передаваемых в синхронном канале. Для передачи изохронных сигналов по синхронному каналу необходимо, чтобы скорость поступления единичных элементов была меньше частоты тактовых импульсов синхронного канала либо равна ей (Ви£Вс). В случае равенства Ви£Вс можно организовать только одноканальную передачу. Для организации N каналов необходимо обеспечить Ви£(Вс /N). Рассмотренные ранее методы согласования сообщений анизохронной структуры с синхронным каналом применимы и для согласования сигналов изохронной структуры с синхронным каналом. Однако, как было показано выше, они не позволяют эффективно использовать синхронный канал. Поэтому получили распространение методы согласования, использующие информацию об известной структуре изохронного сигнала, характеризуемого определенной постоянной скоростью поступления единичных элементовВи. Среди известных методов наибольшее практическое применение получил метод стаффинга (метод вставок). Различают односторонний стаффинг, который в свою очередь может быть подразделен на «+стаффинг» и «—стаффинг»; двусторонний стаффинг (±стаффинг). Сущность этих методов проиллюстрирована на рис. 2.7 («+стаффинг»), где показаны последовательности: передаваемая (рис. 2.7,а) и тактовая последовательность синхронного канала (рис. 2.7,б).
Пусть в некоторый момент tо ЗМ передаваемого сигнала и тактовой последовательности совпадут. Вследствие того, что Ви<Вс, фазовое расхождение между последовательностями через некоторое время достигает величины одного такта последовательности б). Если каждому элементу сообщения а) поставить в соответствие один элемент тактовой последовательности б), то за время Т в последней окажется один лишний элемент. Для обеспечения правильного приема считывание этого лишнего элемента на приеме запрещается специальной кодовой комбинацией, передаваемой по специальному дополнительному каналу. При Ви>Вс применяют «—стаффинг». В этом случае «лишний» элемент образуется в передаваемом сообщении, поэтому он в сопровождении специальных команд передается по дополнительному каналу. При выборе Ви=Вс вследствие нестабильности скоростей возникают ситуации, когда Ви<Вс или Ви>Вс, поэтому в зависимости от сложившихся условий передачи применяют как «+стаффинг», так и «—стаффинг». Отсюда название «двусторонний стаффинг». Согласование источника стартстопных сигналов с синхронным каналом. Стартстопные сигналы относятся к сигналам известной структуры. Они занимают промежуточное положение между изохронным и анизохронными сигналами. Момент появления старт-стопного сигнала на приеме неизвестен, но после появления старт-стопного перехода нетрудно предсказать появление ЗМ внутри стартстопной кодовой комбинации. Знание структуры стартстопного сигнала упрощает задачу сопряжения источника стартстопных сигналов с синхронным каналом и позволяет существенно повысить коэффициент использования синхронного канала по сравнению со случаем, когда передаваемые сообщения имеют четко выраженную анизохронную структуру. Передача стартстопных сигналов осуществляется следующим образом. Поступающий от ИС стартстопный сигнал регенерируется устройством, принцип действия которого аналогичен работе приемника телеграфного аппарата. Каждая стартовая посылка отмечает начало стартстопного цикла и по стартстопному переходу формируются импульсы стробирования, соответствующие серединам принимаемых информационных сигналов в данном телеграфном знаке. Например, при работе кодом МТК-2 со скоростью 50 Бод формируется семь импульсов стробирования, относящих друг от друга на 20 мс, первый из которых отстоит на 10 мс от стартстопного перехода. Регенерированный сигнал запоминается в промежуточных накопителях и затем считывается из них распеделителем. Таким образом формируется изохронный сигнал, который может быть передан по синхронному каналу.
Для передачи стартстопных сигналов со скоростью 50 Бод кодом МТК-2 достаточно иметь импульсную несущую последовательность, имеющую скорость 50…51 имп./с. Таким образом, в одном и том же синхронном канале кодозависимых каналов может быть организованно в 3 раза больше, чем кодонезависимых с d=8,33% и использованием метода СИП.
|
||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-29; просмотров: 571; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.143.181 (0.015 с.) |

 , (2.9)
, (2.9) Dt — интервал времени между двумя соседними импульсами несущей, определяющий скорость передачи импульсной последовательности Вс. Очевидно, что Вс=fн, где fн—частота импульсной последовательности.
Dt — интервал времени между двумя соседними импульсами несущей, определяющий скорость передачи импульсной последовательности Вс. Очевидно, что Вс=fн, где fн—частота импульсной последовательности.
 (2.10)
(2.10) (2.11)
(2.11)