
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Технічна реалізація послідовних коректуючих пристроїв
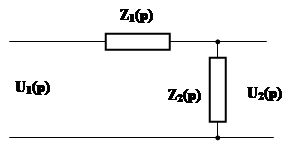
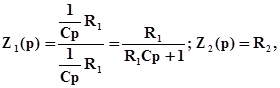
Найпростішими і досить поширеними коректуючими пристроями у схемах систем автоматизованого та автоматичного управління є пасивні чотириполюсники, побудовані на RС-елементах (резисторах та конденсаторах). У багатьох книгах з теорії автоматичного управління [3, 6, 7] є спеціальні таблиці, які містять схеми пасивних коректуючи пристроїв, функції передачі, логарифмічні характеристики й формули для розрахунків параметрів, що відповідають цим пристроям. Найбільш повну таблицю пасивних коректуючих пристроїв наведено в праці [3]. Функції передачі пасивних чотириполюсників найпростіше визначити таким чином. Опори ділянок кола слід записати в операторній формі, тобто прийняти: для ємності ZС(p) = l/Cp,для активного опору ZR(p) = R. Після цього електричне коло слід перетворити в еквівалентний Г-подібний чотириполюсник, схему якого показано на рисунку 2.16. Якщо припустити, що навантаження відсутнє, тобто знехтувати струмом вихідного кола коректуючої ланки порівняно із струмом вхідного кола, то функцію передачі можна визначити як відношення:
Рисунок 2.16 – Г-подібний пасивний чотириполюсник
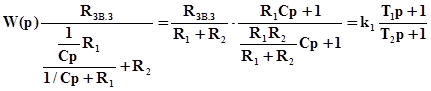
Пасивні чотириполюсники дешеві, надійні, мають досить велику різноманітність схем, у кожній з яких можна змінювати її параметри в широких межах. Проте пасивні чотириполюсники послабляють сигнал внаслідок втрат енергії в резисторах, крім того, на їх характеристики істотно впливає опір навантаження. Тому в схемах застосовуються коректуючі пристрої на базі операційних підсилювачів. При визначенні функції передачі кола з операційним підсилювачем припустимо, що коефіцієнт підсилення kі вхідний опір Rвхприблизно дорівнюють нескінченності; підсилювач вважається безінерційним. Операційний підсилювач, як правило, має інвертуючий та неінвертуючий входи. При збільшенні напруги на інвертуючому вході вихідна напруга зменшується. Інвертуючий вхід дає можливість створювати від'ємний зворотний зв'язок. Схему коректуючого кола з операційним підсилювачем показано на рисунку 2.17. 3 прийнятого припущення про те, що Rвх»¥, випливає, що вхідний струм Iвх дорівнює нулю, тому струм зворотного зв'язку І2дорівнює вхідному струму I1. Напруга на інвертуючому вході операційного підсилювача UBX дорівнює нулю. Це пояснюється тим, що при k = ¥ будь-яке відхилення UΒΧ від нульового значення було б нескінченно підсилене, передане через коло зворотного зв'язку на вхід підсилювача і, будучи інвертоване відносно напруги UΒΧ, скомпенсувало б її. За цих умов досить просто визначити функцію передачі кола з операційним підсилювачем. Для схеми на рисунку 2.17
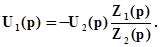
UВХ(р) = U1(p) – I1(p)Z1(p); UВХ(p) - UВИХ(p) = I2(p)Z2(p), але, якщо врахувати, що UВХ = 0, I1 = I2, тоді:
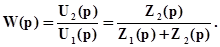
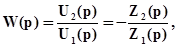
Звідси функція передачі матиме вигляд:
де Z1(p), Z2(p)– повні опори в операторній формі.
Рисунок 2.17 – схема коректуючого кола з операційним підсилювачем Пропорційний регулятор (П-регулятор). Схему регулятора показано на рисунку 2.18,а.Його функція передачі має вигляд:
Інтегральний регулятор (І-регулятор). Схему регулятора показано на рисунку 2.18,б. Вважаючи, що Z1(p)=R; Z2(p)=1/Cp,функцію передачі дістанемо з (1.20):
де T = RC – стала інтегрування. Пропорційно-інтегральний регулятор (ПІ-регулятор). Схему регулятора показано на рисунку 2.18,в.Для цієї схеми:
Тому функція передачі має наступний вигляд:
де kn= R2/R1– коефіцієнт передачі пропорційної складової; Tі = CR1 – стала інтегрування.
Рисунок 2.18 – Електричні схеми типових регуляторів на операційних підсилювачах Диференціальний регулятор (Д-регулятор). Схему регулятора показано на рисунку 2.18,г.Для цієї схеми:
де ТД = RC. Розглянута схема Д-регулятора не забезпечує якісне диференціювання через те, що вона має властивість підсилювати високочастотні порешкоди, які є увхідному сигналі. Дещо обмежити струм перешкоди можна, якщо послідовно з конденсатором C ввімкнути резистор С з невеликим опором (на рисунку 2.18,г цей резистор зображено штриховою лінією). Високоякісний Д-регулятор можна дістати, якщо в коло зворотного зв'язку ввімкнути інтегратор [7]. Схему такого регулятора зображено на рисунку 2.19. Підсилювач DA2,який працює в режимі інвентора, призначений для збереження від'ємного знака зворотного зв'язку.
Функція передачі регулятора має наступний вигляд:
Поклавши R1 = R2 = R3 = R4,дістанемо W(p) = -R5Cp = -ТДр, де ТД = R5C.
Рисунок 2.19– Покращена електрична схема Д-регулятора Пропорційно-диференціальний регулятор (ПД-регулятор). Схему такого регулятора показано на рисунку 2.18,д. Для неї справедливі співвідношення:
тому
де kП=R2/R1; TД=R2C. Пропорційно-інтегрально-диференціальний регулятор (ПІД-регуляmop). Схему регулятора показано на рисунку 2.18,е.Для неї:
а функція передачі має вигляд:
де kП=(R2C2+ R1C1)/ R1C2; TД= R2C1; Tі= R1C2. Коректуючі пристрої на базі операційних підсилювачів мають такі позитивні властивості, як незалежність коефіцієнта передачі від розкиду параметрів внаслідок стабілізуючої дії від'ємного зворотного зв'язку, малий вхідний струм схеми, що забезпечує близький до холостого ходу режим роботи пристрою, ввімкненого до входу операційного підсилювача. Зауважимо, що комбіновані регулятори (ПІ ПД, ПІД) звичайно дістають за рахунок паралельного з'єднання відповідних простих регуляторів (П, I, Д). Для підсилювання вихідних сигналів цих регуляторів використовується додатковий операційний підсилювач. Схема в такому разі дещо ускладнюється, але в ній забезпечується можливість незалежного регулювання складових вихідного сигналу комбінованого регулятора. Приклад. Нехай ЛАЧХ LК(w) коректуючої ланки, визначеної як різниця LБ (w)– LВ(w) відповідає наступній функції передачі:
При цьому згідно побудованій ЛАЧХ коректуючої ланки визначені T1=1/w2=1/10=0,1(c); T2=1/w3=1/125=0,008(c). Порівнюючи функцію передачі коректуючої ланки з таблицею 1 обчислюємо параметри R1 R2, Cсхеми коректуючої ланки за допомогою формул з таблиці 1. Незалежних співвідношень для розрахунку параметрів – два, невідомих параметрів – три, тому якщо задати один з них, можна знайти решту. Приймаємо C=2 мкФ=2×10-6Ф. Тоді: R1=T1/C =-0.l/2×10-6 = 5×104 Ом = 50 кОм. Далі, через те що k = T2/T1=0,08 і
Вибираємо номінали резисторів R1 = 51 кОм; R2 =4.3 кОм. Вибрана коректуюча ланка є пасивним чотириполюсником з коефіцієнтом передачі, меншим за одиницю (k =0.08). Для збереження незмінним коефіцієнта передачі розімкнутої системи необхідно застосувати додатковий підсилювач, коефіцієнт підсилення якого kзадовольняє умову: kkП=1, звідки kП=1/k=1/0.08=12.5.
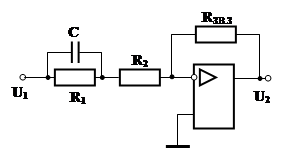
Якщо є можливість збільшити у 12,5 разів коефіцієнт підсилення підсилювача вихідної системи, то додатковий підсилювач не потрібен. Коректуючу ланку, синтез якої виконано, можна також реалізувати на базі операційного підсилювача, використавши схему на рисунку 2.20.
Рисунок 2.20 – Електрична схема інтегро-диферецюючого коректуючого ланцюга Дійсно, згідно з виразом (1.20) функція передачі цієї схеми
збігається з функцією передачі інтегро-диференціюючого коректуючого ланцюга. Різниця полягає тільки в тому, що коефіцієнт передачі kмає різні значення. Відповідно до ЛАЧХ коректуючої ланки Lκ(w) коефіцієнт передачі кореектуючої ланки має дорівнювати одиниці, тому в схемі на рисунку 1.20 слід прийняти RЗВ.З=R1+R2.Решта параметрів схеми такі самі, як і параметри розглянутого раніше пасивного чотириполюсника.
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-06-26; просмотров: 106; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.219.215.75 (0.017 с.) |
 (2.20)
(2.20) 3 виразу (2.20) випливає, що вибір відповідних значень Z1(p) і Z2(p) дає можливість на базі операційного підсилювача створити різноманітні типи регуляторів (коректуючих пристроїв).
3 виразу (2.20) випливає, що вибір відповідних значень Z1(p) і Z2(p) дає можливість на базі операційного підсилювача створити різноманітні типи регуляторів (коректуючих пристроїв). (2.21)
(2.21) (2.22)
(2.22)
 (2.23)
(2.23)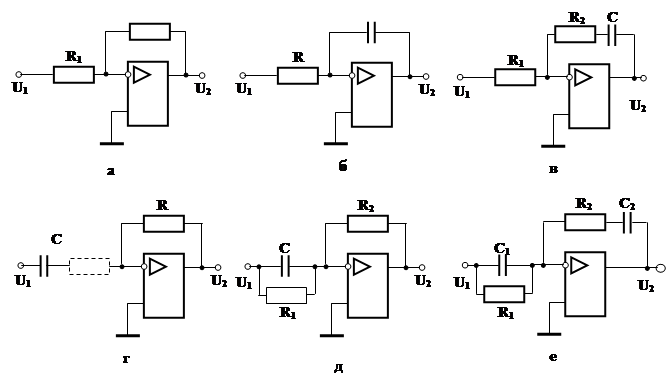
 (2.24)
(2.24) (2.25)
(2.25)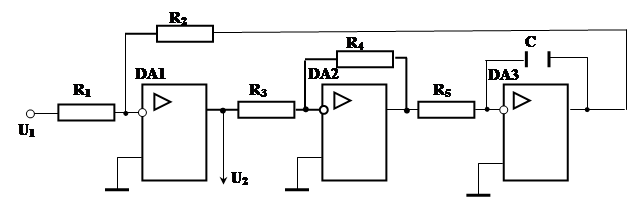
 (2.26)
(2.26)
 (2.27)
(2.27) (2.28)
(2.28)
 (2.29)
(2.29)


