
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Задачи синтеза систем управления. Коррекция систем управления. Корректирующие устройства
Корректирующие устройства Корректирующие устройства систем регулирования осуществляют преобразование сигнала управления. С этой целью их составляют из элементов, которые удобно называть преобразовательными. Используются электрические, механические, гидравлические, пневматические и иные преобразовательные элементы. Пассивные четырехполюсники постоянного тока. Это электрические цепи из резисторов, конденсаторов и индуктивностей. Общая схема пассивного четырехполюсника показана на рис.
Входное и выходное напряжения постоянного тока обозначены соответственно через и1 и и2;z1 =R + 1/(C1s)+L1s и z2 =R + 1/(C2s)+L2s - операторы сопротивлений четырехполюсника; Ri, Ci, Li — соответственно активные сопротивления, емкости и индуктивности; zh— полное сопротивление нагрузки.
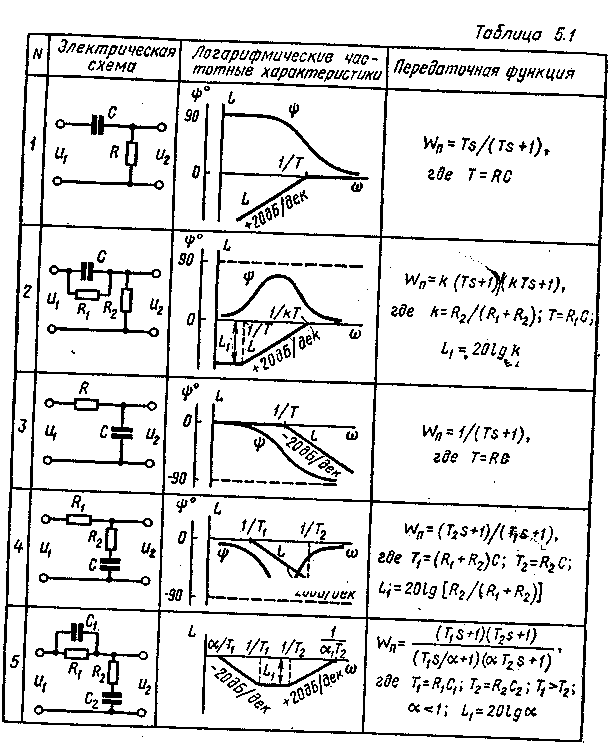
Wu (s) = z2(s)/[z1(s)+z2(s)] Варьируя вид операторов сопротивлений z1(s) и z2(s) и значения Ri, Ci, Li можно получить большое количество четырехполюсников, описываемых различными передаточными функциями Wn. Стоимость пассивных четырехполюсников низкая, а стабильность параметров достаточно высокая. Этими достоинствами объясняется широкое использование их в системах автоматического регулирования, у которых сигналом управления является напряжение постоянного тока. Основной недостаток пассивных четырехполюсников заключается в том, что они ослабляют сигнал; кроме того, при конечном значении полного сопротивления нагрузки преобразование сигнала отклоняется от желаемого, соответствующего виду передаточной функции Wn. Наиболее характерные схемы пассивных четырехполюсников постоянного тока показаны в табл. Там же приведены их передаточные функции и логарифмические частотные характеристики. Принято разделять четырехполюсники на дифференцирую
ПОСТАНОВКА ЗАДАЧИ УПРАВЛЕНИЯ Суть вопроса сводится к выбору такого управления u, при котором выходное значение y объекта управления совпадало бы с задающим значением s или их разница лежала бы в допустимых пределах при изменении внешнего возмущающего воздействия f и a.Возмущение f называется координатным, а возмущение a – пара-метрическим. Под влиянием внешних возмущений, информации о которых часто недостаточно, взаимосвязь между входом и выходом объекта становится неоднозначной и неопределенной, что сильно затрудняет решение задачи. Координатное возмущение есть неизвестная величина со стороны нагрузки на объект управления, которая проявляется в виде неконтролируемых произвольных изменений технологических параметров и по характеру изменения во времени может быть импульсной и медленно меняющейся. Параметрическое возмущение есть неизвестная величина из некоторого ограниченного множества, в результате действия которой происходит медленное изменение параметров объекта управления. Следует отметить принципиальное различие между этими двумя типами возмущений. Рассмотрим случай, когда на объект управления об W p() со входным сигналом u и выходом y действуют оба типа возмущающих воздействий.
|
||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 108; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.216.190.167 (0.005 с.) |
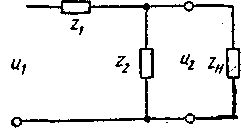
 Если напряжение u2 приложено к нагрузке с бесконечно большим полным сопротивлением zh, то передаточная функция пассивного четырехполюсника
Если напряжение u2 приложено к нагрузке с бесконечно большим полным сопротивлением zh, то передаточная функция пассивного четырехполюсника


