Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
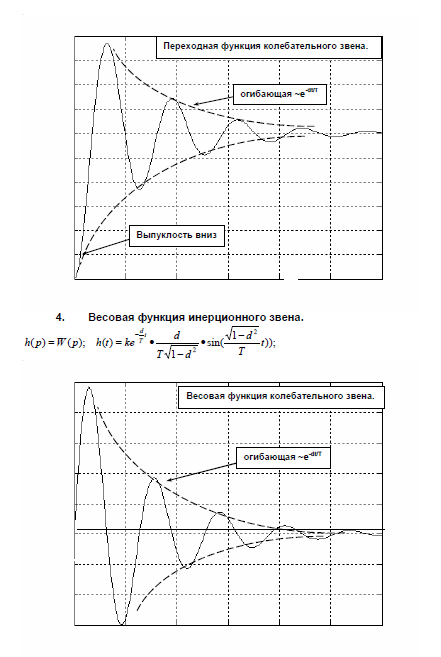
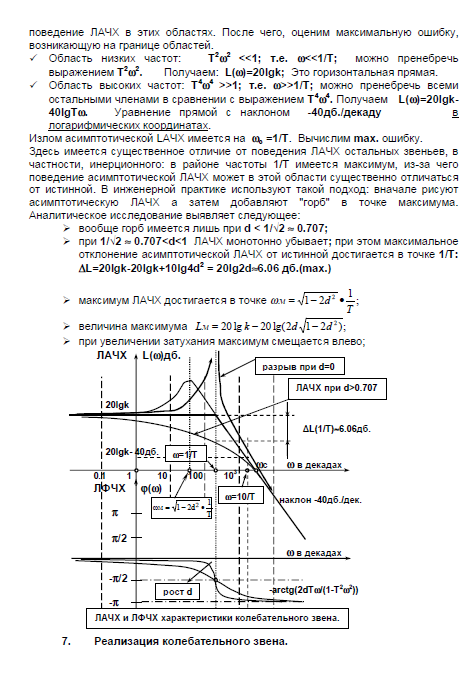
Колебательное звено. Уравнение колебательного звена. Получение передаточной функции, временных и частотных функций и построение временных и частотных характеристик колебательного звена
18 Виды соединений звеньев в структурных схемах и правила их преобразования Структурная схема САУ в простейшем случае строится из элементарных динамических звеньев. Но несколько элементарных звеньев могут быть заменены одним звеном со сложной передаточной функцией. Для этого существуют правила эквивалентного преобразования структурных схем. Рассмотрим возможные способы преобразований. 14
19. Последовательное соединение (рис.28) – выходная величина предшествующего звена подается на вход последующего. При этом можно записать: y1 = W1 15 yn = W1 где То есть цепочка последовательно соединенных звеньев преобразуется в эквивалентное звено с передаточной функцией, равной произведению передаточных функций отдельных звеньев. 19.
y = y1 + y2 + … + yn = (W1 + W2 + … + W3)yo = Wэкв где То есть цепочка звеньев, соединенных параллельно – согласно, преобразуется в звено с передаточной функцией, равной сумме передаточных функций отдельных звеньев.
19. Параллельно – встречное соединение (рис. 30а) – звено охвачено положительной или отрицательной обратной связью. Участок цепи, по которому сигнал идет в противоположном направлении по отношению к системе в целом (то есть с выхода на вход) называется цепью обратной связи с передаточной функцией Wос. При этом для отрицательной ОС:
y = Wпu; y1 = Wосy; u = yo – y1, следовательно y = Wпyo – Wпy1 = Wпyo –WпWocy = > y(1 + WпWoc) = Wпyo = > y = Wэквyo
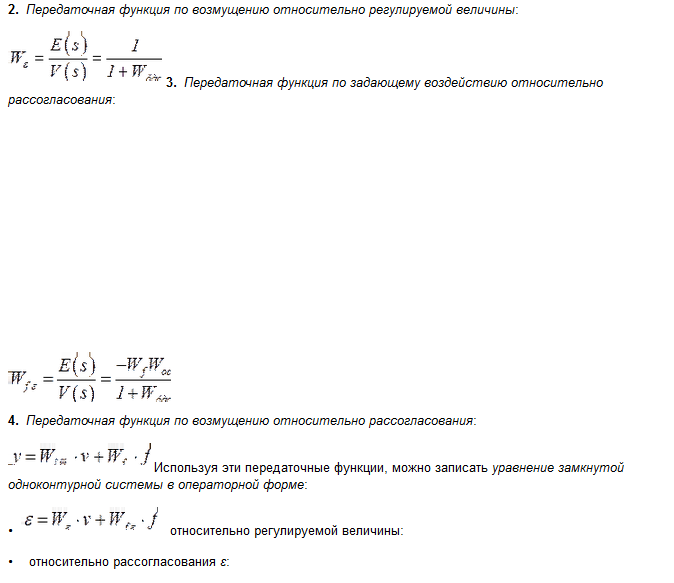
19 Передаточные функции одноконтурной системы относительно выходной величины и ошибки ре
Понятие устойчивости систем управления. Необходимое и достаточное условие устойчивости линейных систем автоматического управления. Влияние корней характеристического уравнения на характер переходного процесса в системе
Понятие устойчивости На любую систему автоматического управления всегда действуют различные внешние возмущающие воздействия, которые могут нарушать ее нормальную работу. Устойчивость является одним из основных требований, предъявляемых к САУ. Неустойчивые системы не работоспособны. Поэтому важно уметь определять и соответствующим выбором структуры и параметров системы обеспечивать ее устойчивость.
В простейшем случае понятие устойчивости связано со способностью системы возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния.Если система неустойчива, то она не возвращается в состояние равновесия, из которого ее вывели, она либо удаляется от него, либо совершает вокруг него недопустимо большие колебания.Наглядно устойчивость равновесия может быть представлена следующим образом. Рассмотрим некоторую вогнутую поверхность, в которой расположен шар (рис.1). Положение равновесия шара характеризуется точкой А0. При всяком отклонении шара от положения равновесия, например в точку А1, он будет стремиться снова возвратиться к положению равновесия – в точку А0 (при отсутствии сил трения). Такое положение равновесия устойчиво. Случай, изображенный на рисунке 2 соответствует неустойчивому положению равновесия.
Рисунок 1 Рисунок 2
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 92; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.171.20 (0.005 с.) |



 yo; y2 = W2
yo; y2 = W2  .
. Параллельно – согласное соединение (рис.29) – на вход каждого звена подается один и тот же сигнал, а выходные сигналы складываются. Тогда:
Параллельно – согласное соединение (рис.29) – на вход каждого звена подается один и тот же сигнал, а выходные сигналы складываются. Тогда: .
.