Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Описание технологической установки
Грузоподъемный кран – устройство, предназначенное для подъема и транспортировки грузов, зацепленного с помощью грузового крюка или другого грузозахватного инструмента. По исполнению краны можно разделить на несколько основных типов: стреловые краны, краны мостового типа, краны штабелеры. Мостовой кран представляет собой мост, перемещающийся по крановым путям на ходовых колесах, которые установлены на концевых балках. Тележка мостового крана представляет собой грузоподъемную машину циклического действия, предназначенную для подъема, перемещения груза, удерживаемого грузозахватным устройством (крюк).
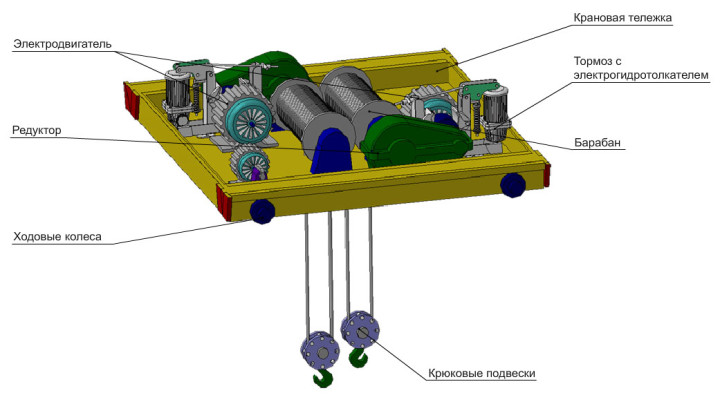
Рисунок 1.1. Устройство тележка мостового крана и электрического привода Грузовая тележка - это важнейшая составная часть мостового крана. Она включает механизмы подъема грузов и передвижения самой тележки. Традиционно она состоит из рамы, сваренной из продольных и поперечных балок, которая опирается на ходовые колеса. В качестве механизма подъема чаще всего используется электрическая таль (тельфер). Также она может оборудоваться дополнительными механизмами, в частности, ограничителем высоты подъема. Рама тележки имеет очень жесткую конструкцию. На ней располагается: · Механизм подъема; · Механизм передвижения; · Предмет для распределения тока; · Механизм безопасности. Механизм безопасности обеспечивает нормальное передвижение и подъем грузов. К устройствам для безопасности относят предметы, которые ограничивают высоту подъема груза и грузоподъемность. Также к безопасности относится такой механизм подъема, который автоматически отключается при подъеме груза на максимальную высоту, а также при подъеме груза, вес которого превышает допустимый вес на 10%.
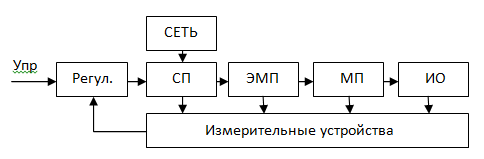
1.1 Устройство электропривода Функциональная схема электропривода показана на рисунке 1.1.1.
Рисунок 1.1.1. Функциональная схема электропривода механизма передвижения тележки крана Функциональные элементы: · Регулятор предназначен для управления процессами, протекающими в электроприводе; · Силовой преобразователь (СП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного и переменного тока; · Электромеханический преобразователь (ЭМП) — двигатель постоянного или переменного тока, предназначен для преобразования электрической энергии в механическую; · Механический преобразователь (МП) (редуктор) может изменять скорость вращения; · Упр – управляющее воздействие; · ИО — исполнительный орган. Функциональные части: · Силовая часть или электропривод с разомкнутой системой регулирования; · Механическая часть; · Система управления электропривода [2]. 1.2 Принцип действия электропривода Электропривод использующийся в нашем микроконтроллерном устройстве выполнен на базе трёхфазного мостового несимметричного силового преобразователя. На выходе преобразователя формируется напряжение регулируемой амплитуды и частоты, подаваемое на обмотки статора двигателя. Используя сигналы обратной связи по току и напряжению, система управления вычисляет неизмеряемые переменные, регулирует скорость двигателя в соответствии с получаемым заданием[3]. Работа электропривода осуществляется следующим образом. При наличии рассогласования на входе регулятора скорости, на его выходе формируется сигнал, пропорциональный этому рассогласованию, который, сравниваясь с текущим значением тока якоря, поступает на вход регулятора тока. Регулятор тока усиливает эту разность и подает управляющее напряжение на схему формирования управляющих импульсов, функция которой заключается в формировании и распределении импульсов управления силовыми тиристорами. По мере уменьшения рассогласования (под действием отрицательной обратной связи по частоте вращения) происходит стабилизация часты вращения двигателя на уровне, пропорциональном напряжению задания. Коэффициент усиления системы регулирования обеспечивает необходимый диапазон регулирования и достаточную точность поддержания частоты вращения при различных возмущающих воздействиях[4].
1.3 Основные параметры и требования к электроприводам Электропривод большинства грузоподъёмных машин характеризуется повторно-кратковременным режимом работы при большей частоте включения, широком диапазоне регулирования скорости и постоянно возникающих значительных перегрузках при разгоне и торможении механизмов. Все это предъявляет к электрооборудованию ряд специфических требований, основными из которых являются: высокая надежность, бесперебойность работы, поддержание заданной скорости и заданного ускорения и замедления. При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями: исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствам, а также конструктивное исполнение двигателя по способу монтажа и крепления [5]. Для качественного выполнения подъема, спуска и перемещения грузов электропривод крановых механизмов должен удовлетворять следующим основным требованиям: § Регулирование угловой скорости двигателя в сравнительно широких пределах в связи с тем, что тяжелые грузы целесообразно перемещать с меньшей скоростью, а пустой крюк или ненагруженную тележку – с большей скоростью для увеличения производительности крана. Пониженные скорости необходимы также для осуществления точной остановки транспортируемых грузов с целью ограничения ударов при их посадке; § Ограничение ускорений до допустимых пределов при минимальной длительности переходных процессов. Первое условие связано с ослаблением ударов в механических передачах при выборе зазора, с предотвращением пробуксовки ходовых колес тележек и мостов, с уменьшением раскачивания подвешенного на канатах груза при интенсивном разгоне и резком торможении механизмов передвижения; второе условие необходимо для обеспечения высокой производительности крана; § Реверсирование электропривода и обеспечение его работы как в двигательном режиме, так и в тормозном режиме[6]. 1.4 Выбор разрабатываемого узла В ходе выполнения выпускной квалификационной работы была смоделирована и разработана система управления электроприводом механизма передвижения тележки крана. В разработанную систему входит двигатель постоянного тока, управляемый выпрямитель, микроконтроллерное устройство для управления. Также в системе присутствуют датчики для реализации программного регулятора, семисегментные индикаторы, клавиатура и интерфейс для связи с внешними устройствами. Разработанная система может применяться в технологическом процессе предприятий, занимающихся производством грузоподъемного оборудования.
ТЕХНИЧЕСКОЕ ЗАДАНИЕ В работе требуется разработать микроконтроллерное устройство для управления электроприводом механизма передвижения тележки крана. Для этого требуется синтезировать устройства, для управления движением двухмассовой электромеханической системой, содержащей силовой преобразователь (СП) напряжения и электродвигатель (ЭД) постоянного тока независимого возбуждения, связанный с рабочим органом (РО) вязкоупругой кинематической передачей. Рисунок 2.1. Функциональная схема объекта управления По техническому заданию необходимо произвести расчет силового преобразователя для трёхфазной мостовой несимметричный схемы. Напряжение сети 380/220 В, возможное отклонение напряжения – 5%. Предполагается наличие измерителей (датчиков) напряжения (ИН), тока (ИТ), момента (ИМ) и скорости (ИС). 2.1 Исходные данные объекта управления 1. Максимальная угловая скорость ЭД: ΩМ =100 рад/с 2. Максимальный момент нагрузки: Мс = 81.4 Н∙м 3. Момент инерции ротора ЭД: J1 = 0,5 кг∙м2 4. Момент инерции механической части РО: J2 = 0,45 кг∙м2 5. Номинальное напряжение ЭД: Uн = 220 В 6. Активное сопротивление якорной цепи: Ra = 0,48 Ом 7. Индуктивность якорной цепи: La = 0,014 Гн 8. Конструктивная постоянная ЭД: С = 1,99 Вб 9. Номинальный ток ЭД: Iн = 44 А 10. Максимальный ток ЭД: Iм = 3∙Iн 11. Постоянная времени СП: Тсп = 0,0033 с при Р > 3 кВт (P = 3,18 кВт) 12. Коэффициент передачи - датчика напряжения Кдн = 0,05; - датчика тока Кдт = 0,076 В/А; - датчика скорости Кдс = 0,05 В∙с; - датчика момента Кдм = 0,05 В/Н∙м. 13. Приведенный коэффициент жесткости механической части: С12 = 234 Н∙м/рад. Коэффициент внутреннего вязкого трения: b12 = 1,49 Н∙м∙c/рад. 2.2 Технические требования к системе автоматического управления 1. Максимально допустимая относительная погрешность стабилизации углового положения: ΔМ = 0.5% от заданного углового перемещения; 2. Полоса пропускания: 7 Гц; 3. Время восстановления положения при ступенчатом изменении момента нагрузки от нулевого до максимального значения (время возврата положения к значению, равному 3∙ΔМ): Tв ≤ 1с; 4. Пеpеpегулиpование скорости: σ ≤ 20%. 2.3 Технические требования к микроконтроллерному устройству управления
МКУ должно включать в себя: 1. Базовый микроконтроллер (32-х разрядный); 2. Оперативные периферийные устройства: светодиодные семисегментные индикаторы (3 знакомест), клавиатура (8 клавиш), внешние прерывания (3 линии); 3. Внешние устройства: § Входные: АЦП (5 каналов, 10 разрядный, Uвх = 0...10 В); § Выходные: схема управления ключами трёхфазного мостового несимметричного силового преобразователя. 4. Интерфейс для связи с дополнительными внешними устройствами: USB; 5. Подключение SD-карты памяти через интерфейс SDIO. 6. Разработку детальной блок-схемы алгоритма, реализующего опрос нулевого(CH0), первого(CH1) и второго(CH2) каналов. Для визуального отображения изменения значения напряжения следует использовать жидкокристаллический дисплей с интервалом T=0.5c.
|
|||||||||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 89; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.130.19 (0.029 с.) |