
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
На выполнение выпускной квалификационной работыСтр 1 из 18Следующая ⇒
З А Д А Н И Е На выполнение выпускной квалификационной работы
3. Содержание работы (перечень вопросов, подлежащих разработке):
МИНОБРНАУКИ РОССИИ федеральное государственное бюджетное образовательное учреждение высшего образования «ИВАНОВСКИЙ ГОСУДАРСТВЕННЫЙ ЭНЕРГЕТИЧЕСКИЙ УНИВЕРСИТЕТ ИМЕНИ В.И.ЛЕНИНА» Факультет электромеханический Кафедра электроники и микропроцессорных систем Направление подготовки 11.03.04:06 «Электроника и наноэлектроника» Направленность (профиль) образовательной программы «Промышленная электроника»
КАЛЕНДАРНЫЙ ПЛАН подготовки выпускной квалификационной работы
УДК 681.532.52 Пояснительная записка содержит 91 страницу, 42 рисунка, 8 таблиц, список используемых источников из 27 наименований, 7 приложений.
СИЛОВОЙ ПРЕОБРАЗОВАТЕЛЬ, ЭЛЕКТРОПРИВОД, РЕГУЛЯТОР, МИКРОКОНТРОЛЛЕРНОЕ УСТРОЙСТВО. Выпускная квалификационная работа посвящена разработке микроконтроллерного устройства для управления электроприводом механизма передвижения тележки крана. В пояснительной записке приведено описание принципиальной схемы силового преобразователя, функциональной и принципиальной схем электромеханической системы автоматического управления и информационно-управляющего микроконтроллерного устройства, блок-схема и листинг программы, осуществляющей подсчет и визуальное отображение в двоичном коде периода T импульсов, поступающих с внешнего генератора. Также описывается организационная структура предприятия.
ANNOTATION The graduation paper contains 91 pages, 62 figures, 20 tables, 40 sources and 7 annexes.
POWER CONVERT, ELECTRIC DRIVER, REGULATOR,
The final qualifying work is devoted to the development of a microcontroller device for controlling the electric drive mechanism of the crane truck. The explanatory note describes the circuit diagram of the power converter, the functional and circuit diagrams of the electromechanical automatic control system and the information and control microcontroller device, a block diagram and a listing of the program that performs the calculation and visual display in binary code of the period T of pulses from an external generator. The organization structure of the enterprise is also discussed.
С О Д Е Р Ж А Н И Е ВВЕДЕНИЕ.. 9 1 ОПИСАНИЕ ТЕХНОЛОГИЧЕСКОЙ УСТАНОВКИ.. 10 Исходные данные объекта управления.. 14
2.2 Технические требования к системе автоматического управления.. 15 2.3 Технические требования к микропроцессорной системе управления.. 15 3 РАСЧЕТ СИЛОВОГО ПРЕОБРАЗОВАТЕЛЯ.. 16 Параметры цепи нагрузки. 17 3.1.4 Схема преобразования. 17 Фазовый вентиль. 26 Выбор типа охладителя. 30 Коэффициент мощности. 42 Блок АЦП.. 73 Подключение индикации. 77 Внешние прерывания. 80 СПИСОК СОКРАЩЕНИЙ
ВВЕДЕНИЕ На сегодняшний день крановое электрооборудование является одним из основных средств комплексной механизации всех отраслей экономики России. В настоящее время грузоподъемные машины выпускаются большим числом заводов. Эти машины используются во многих отраслях народного хозяйства, металлургии, строительстве, при добыче полезных ископаемых, машиностроении, транспорте и в других отраслях. Задачей выпускной квалификационной работы является разработка микроконтроллерного устройства для управления электроприводом механизма передвижения тележки крана. Основные требования, предъявляемые к электроприводу: высокая надежность, бесперебойность работы, поддержание заданной скорости и заданного ускорения и замедления, регулирование угловой скорости двигателя в широких пределах, реверсирование электропривода и обеспечение его работы как в двигательном, так и в тормозном режиме. Перемещение будет осуществляться при помощи управления электродвигателем с реверсом для передвижения тележки в обе стороны. Силовой преобразователь может быть выполнен по трехфазной нулевой схеме выпрямления. Он преобразует переменное трехфазное напряжение сети в постоянное. Данная схема позволяет управлять выпрямленным напряжением, подаваемым на двигатель, скорость вращения которого зависит от этого напряжения. Микропроцессорная система управления предназначена для поддерживания технических требований САУ и заданного параметра управления – скорости вращения электропривода. Другими задачами МКУ являются: управление углом отпирания тиристоров мостовой схемы выпрямления, обработка сигналов прерываний, обработка информации с датчиков тока, напряжения, момента и скорости.
ТЕХНИЧЕСКОЕ ЗАДАНИЕ В работе требуется разработать микроконтроллерное устройство для управления электроприводом механизма передвижения тележки крана. Для этого требуется синтезировать устройства, для управления движением двухмассовой электромеханической системой, содержащей силовой преобразователь (СП) напряжения и электродвигатель (ЭД) постоянного тока независимого возбуждения, связанный с рабочим органом (РО) вязкоупругой кинематической передачей.
Рисунок 2.1. Функциональная схема объекта управления По техническому заданию необходимо произвести расчет силового преобразователя для трёхфазной мостовой несимметричный схемы. Напряжение сети 380/220 В, возможное отклонение напряжения – 5%. Предполагается наличие измерителей (датчиков) напряжения (ИН), тока (ИТ), момента (ИМ) и скорости (ИС). 2.1 Исходные данные объекта управления 1. Максимальная угловая скорость ЭД: ΩМ =100 рад/с 2. Максимальный момент нагрузки: Мс = 81.4 Н∙м 3. Момент инерции ротора ЭД: J1 = 0,5 кг∙м2 4. Момент инерции механической части РО: J2 = 0,45 кг∙м2 5. Номинальное напряжение ЭД: Uн = 220 В 6. Активное сопротивление якорной цепи: Ra = 0,48 Ом 7. Индуктивность якорной цепи: La = 0,014 Гн 8. Конструктивная постоянная ЭД: С = 1,99 Вб 9. Номинальный ток ЭД: Iн = 44 А 10. Максимальный ток ЭД: Iм = 3∙Iн 11. Постоянная времени СП: Тсп = 0,0033 с при Р > 3 кВт (P = 3,18 кВт) 12. Коэффициент передачи - датчика напряжения Кдн = 0,05; - датчика тока Кдт = 0,076 В/А; - датчика скорости Кдс = 0,05 В∙с; - датчика момента Кдм = 0,05 В/Н∙м. 13. Приведенный коэффициент жесткости механической части: С12 = 234 Н∙м/рад. Коэффициент внутреннего вязкого трения: b12 = 1,49 Н∙м∙c/рад. 2.2 Технические требования к системе автоматического управления 1. Максимально допустимая относительная погрешность стабилизации углового положения: ΔМ = 0.5% от заданного углового перемещения; 2. Полоса пропускания: 7 Гц; 3. Время восстановления положения при ступенчатом изменении момента нагрузки от нулевого до максимального значения (время возврата положения к значению, равному 3∙ΔМ): Tв ≤ 1с; 4. Пеpеpегулиpование скорости: σ ≤ 20%. 2.3 Технические требования к микроконтроллерному устройству управления МКУ должно включать в себя: 1. Базовый микроконтроллер (32-х разрядный); 2. Оперативные периферийные устройства: светодиодные семисегментные индикаторы (3 знакомест), клавиатура (8 клавиш), внешние прерывания (3 линии); 3. Внешние устройства: § Входные: АЦП (5 каналов, 10 разрядный, Uвх = 0...10 В); § Выходные: схема управления ключами трёхфазного мостового несимметричного силового преобразователя.
4. Интерфейс для связи с дополнительными внешними устройствами: USB; 5. Подключение SD-карты памяти через интерфейс SDIO. 6. Разработку детальной блок-схемы алгоритма, реализующего опрос нулевого(CH0), первого(CH1) и второго(CH2) каналов. Для визуального отображения изменения значения напряжения следует использовать жидкокристаллический дисплей с интервалом T=0.5c. Расчетный ток нагрузки В отсутствии графика нагрузки вентильного преобразователя в качестве расчетного примем номинальный ток нагрузки
Параметры цепи нагрузки Для двигателя постоянного тока активное сопротивление его якорной цепи RЯЦ, состоит из сопротивлений обмоток якоря RЯ, дополнительных полюсов RДП и компенсационной RК, может быть вычислено по приближённой формуле: где UdH – номинальное напряжение, В; IdH – номинальный ток, А; PH – номинальная мощность, Вт, электродвигателя постоянного тока.
Собственная индуктивность якоря двигателя постоянного тока определяется по формуле Лиумвиля - Уманского:
где KL = 10 – конструктивный коэффициент,
3.1.4 Схема преобразователя На рис.3.1.4.1 представлена схема преобразователя. Согласно заданию в качестве преобразователя возьмем трёхфазную мостовую несимметричную схему.
Рис.3.1.4.1 Трехфазная мостовая несимметричная схема 3.2 Выбор вида связи выпрямителя с сетью В этом разделе выбирается элемент, связывающий вентильную схему с сетью переменного тока (согласующий трансформатор или токоограничивающий реактор – ТОР). Основой для принятий решения являются номинальные напряжения сети (фазное
3.3 Выбор согласующего трансформатора или токоограничивающего реактора В качестве звена, согласующего выпрямительный блок с сетью переменного тока, может использоваться согласующий трансформатор либо токоограничивающий реактор. Согласующий трансформатор может применяться для следующих целей: 1. изменить величину переменного напряжения сети в соответствии с принятой схемой выпрямления; 2. преобразовать число фаз сети переменного напряжения и/или задать среднюю точку; 3. своим сопротивлением понизить токи короткого замыкания при внутренних и внешних повреждениях в выпрямителе и ограничить скорость нарастания прямого тока вентилей в коммутационных процессах. ТОР может выполнить только третью задачу. Следовательно, для трехфазной мостовой несимметричной схемы необходим дополнительный анализ. Преобразователь должен обеспечить номинальное напряжение на нагрузке в нормальных режимах работы с учетом минимально допустимых углов регулирования, возможных понижения сети и падений напряжения в элементах установки (вентильной схеме, сглаживающем реакторе, соединительных проводах).
где
Ток на входе вентильного преобразователя (ток вторичной обмотки трансформатора или ТОР) где
Для мостовых трехфазных схем возможно применение токоограничивающего реактора при выполнении условия:
Условия для использования токоограничивающего реактора не выполняются, следовательно, в качестве элемента, связывающего вентильную схему с сетью переменного тока, возьмем согласующий трансформатор. 3.4 Выбор и проверка согласующего трансформатора Габаритная мощность трансформатора определяется по выражению, кВА, где
Далее необходимо подобрать соответствующий однофазный трансформатор, отвечающий следующим условиям: где Выберем трансформатор ТС-15/0.6. Технические данные: Номинальный вторичной ток трансформатора рассчитывается по формуле: где
Выбранный трансформатор подходит по всем условиям проверки. Определим индуктивное где
При использовании согласующего трансформатора в дальнейших расчетах будем учитывать, что к выпрямителю подводится номинальное переменное напряжение, создаваемое вторичной обмоткой
3.5 Расчет регулировочной характеристики Регулировочной характеристикой является аналитическая или графическая зависимость напряжения на выходе выпрямителя от угла регулирования. Исходными данными для ее построения служат напряжение, подводимое к вентильной схеме В качестве расчетного примем режим непрерывных токов при работе на активно-индуктивную нагрузку. Регулировочная характеристика строится без учета падения напряжения в выпрямителе и в цепи выпрямленного тока. 1. Выпрямленное напряжение преобразователя при угле регулирования где 2. Регулировочная характеристика для трёхфазного мостового несимметричного преобразователя:
Рис. 3.3.1. Регулировочная характеристика. По полученной характеристике определим минимальный (начальный) угол управления,
Фазный вентиль Коэффициент формы тока вентиля КФ определяется следующим образом: Среднее значение тока где
Дополнительные данные. Определим скорость нарастания тока в эквивалентном вентиле при включении. Ее максимальное значение определяется выражением: где
Предварительный выбор и расчет диодов и тиристоров Выбор типа охлаждения. Охладители предназначены для отвода тепла от полупроводникового прибора и создания приемлемого теплового режима. Для выбранных полупроводниковых приборов рекомендуемые охладители: — для тиристора О151-80, — для диода О231-80.
Проверка по аварийному току Для защиты вентилей полупроводниковых преобразователей в аварийных режимах работы используются быстродействующие автоматические воздушные выключатели. В этом случае при анализе теплового режима можно считать, что через вентиль проходит один импульс аварийного тока и выделяется количество тепла, соответствующее тепловому эквиваленту Для тиристора: Для диода: Полупроводниковый прибор будет устойчив к тепловому воздействию аварийного тока при выполнении условия:
Условие (3.8.1.5.2.2) не выполняется. Следовательно, требуется защита вентилей плавкими предохранителями.
Коэффициент мощности Коэффициент мощности где Активная мощность определяется мощностью, отдаваемой в нагрузку, и потерями мощности в элементах преобразователя Потребление реактивной мощности Q преобразователем складывается из двух составляющих: где Для согласующего трансформатора потребление реактивной мощности определяется только величиной тока нагрузки преобразователя:
где Потребление реактивной мощности вентильной схемой Для выпрямителя, как и для любой электрической установки с несинусоидальными токами, коэффициент мощности Для трёхфазной мостовой несимметричной схемы
Рассчитаем и построим кривые коэффициентов мощности в зависимости от тока нагрузки при Результаты расчетов занесем в таблицу 3.10.3.1
Таблица 3.10.3.1. Результаты расчетов мощностей и коэффициента мощности
Рис.3.10.3.1. Кривые коэффициента мощности в зависимости от тока нагрузки при разных углах регулирования. Из рисунка 3.10.3.1 видно, что чем выше угол управления, тем меньше коэффициент мощности преобразователя, так как интервал рекуперации тока в питающую сеть становится длительнее, мощность, отдаваемая в нагрузку, уменьшается, а потребление реактивной мощности вентильной схемы увеличивается. Вывод В данном курсовом проекте была разработана схема управляемого трехфазного мостового выпрямителя с системой импульсно-фазового управления (СИФУ) силовыми ключами. Были проведены расчеты, в ходе которых: - был выбран элемент, трехфазный трансформатор типа ТС-15/0.6, удовлетворяющий всем критериям проверки, который согласует питающую сеть и силовые ключи; - рассчитана и построена регулировочная характеристика выпрямителя, по которой найдены начальный и конечный углы регулирования, которые составили 65эл. гр. и 147 эл. гр. Соответственно; - расчитана необхадимая индуктивность цепи нагрузки(пункт 3.6.1), обеспечивающей непрерывный ток во всем диапазоне изменения нагрузки, которая показала, что индуктивность якоря не достаточна для заданных параметров схемы, поэтому потребовалось использование сглаживающего реактора; - для четырех углов управления, включая начальный и конечный, были построены внешние характеристики УВ, представленные на рисунке 3.4.1, рассчитана и построена линия граничных токов для возможности выбора необходимой индуктивности якоря, чтобы обеспечивать непрерывный ток преобразователя; - был проведен расчет рабочих и аварийных режимов работы трансформатора. Исходя из данных, полученных из анализа рабочего режима, был выбран тиристор серии Т152-80 и диод Д132-80, совместимый с тиристором охладитель О151-80 и совместный с диодом охладитель О231-80. Проверка вентиля показала, что выбранный тиристор проходит по допустимому значению аварийного тока, поэтому нет необходимости устанавливать плавкие предохранители. Основные элементы защиты представляют собой автоматические воздушные выключатели QF1 типа А3712Б и QF2 типа А3711Б (пункт 3.9.) Для преобразователя были определены его энергетические характеристики – коэффициента полезного действия (рисунок 3.10.2.1) и коэффициента мощности (рисунок 3.10.3.1). Из рисунка 3.10.3.1 видно, что чем выше угол управления, тем меньше коэффициент мощности преобразователя, так как интервал рекуперации тока в питающую сеть становится длительнее, мощность, отдаваемая в нагрузку, уменьшается, а потребление реактивной мощности вентильной схемы увеличивается. . Наибольший коэффициент мощности 0.625. Также по заданию была разработана СИФУ тиристорами, которая включает в себя схему синхронизации с сетью, необходимую, для определения точек коммутации и передачи этих данных на микроконтроллер STM32F103ZF. В микроконтроллере посредством внутреннего таймера отсчитывается заданный угол регулирования и отправляется импульс, который через оптрон MOC3061-M поступает на управляющий электрод тиристора, открывая его.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 92; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.128.199.88 (0.143 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 =
=  = 44 A.
= 44 A. (3.1.3)
(3.1.3)
 (3.1.2)
(3.1.2) – число полюсов электродвигателя, NH – номинальная скорость вращения, об/мин. Для номинальной скорости NH =1433,121 об/мин.
– число полюсов электродвигателя, NH – номинальная скорость вращения, об/мин. Для номинальной скорости NH =1433,121 об/мин.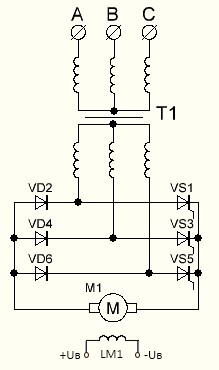
 и линейное
и линейное  ) и нагрузки –
) и нагрузки –  и схема выпрямления.
и схема выпрямления.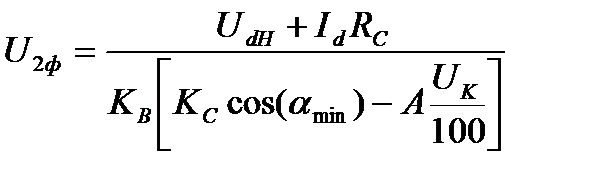 , (3.3.1)
, (3.3.1) ), В;
), В;  – падение напряжения на активных сопротивлениях цепи выпрямленного тока (вентилях, сглаживающем реакторе, соединительных проводах), предварительно можно принять
– падение напряжения на активных сопротивлениях цепи выпрямленного тока (вентилях, сглаживающем реакторе, соединительных проводах), предварительно можно принять  ;
;  – коэффициент схемы выпрямления (для трёхфазной мостовой несимметричной схемы выпрямления
– коэффициент схемы выпрямления (для трёхфазной мостовой несимметричной схемы выпрямления  );
);  – коэффициент, учитывающий возможное падение напряжения сети, в соответствии с ГОСТ 13109-87 на зажимах электроприемников в нормальных режимах допускается отклонение напряжения
– коэффициент, учитывающий возможное падение напряжения сети, в соответствии с ГОСТ 13109-87 на зажимах электроприемников в нормальных режимах допускается отклонение напряжения  , следовательно,
, следовательно,  (расчетным является значение
(расчетным является значение  );
);  – минимальный угол регулирования для нереверсивного преобразователя при согласованном управлении;
– минимальный угол регулирования для нереверсивного преобразователя при согласованном управлении;  – коэффициент наклона внешней характеристики выпрямителя (для трёхфазной мостовой несимметричной схемы выпрямления
– коэффициент наклона внешней характеристики выпрямителя (для трёхфазной мостовой несимметричной схемы выпрямления  ), учитывающий понижение напряжения на выходе выпрямителя при коммутации токов вентилей;
), учитывающий понижение напряжения на выходе выпрямителя при коммутации токов вентилей;  – напряжение короткого замыкания трансформатора, %, предварительно можно принять
– напряжение короткого замыкания трансформатора, %, предварительно можно принять  .
.
 (3.3.2)
(3.3.2) – коэффициент фазного тока при активно–индуктивной нагрузке (
– коэффициент фазного тока при активно–индуктивной нагрузке ( );
);  – коэффициент, учитывающий отклонение формы тока от прямоугольного,
– коэффициент, учитывающий отклонение формы тока от прямоугольного,  .
. А.
А. , (3.3.3)
, (3.3.3) условие не выполняется.
условие не выполняется. , (3.4.1)
, (3.4.1) – коэффициент типовой мощности трансформатора (
– коэффициент типовой мощности трансформатора ( ).
). кВА
кВА ,
, ,
, , (3.4.2)
, (3.4.2) ,
, ,
,  ,
,  ,
,  – номинальные значения мощности, первичного и вторичного напряжения и вторичного тока трансформатора.
– номинальные значения мощности, первичного и вторичного напряжения и вторичного тока трансформатора. =15 кВА,
=15 кВА,  В,
В,  В,
В,  Вт,
Вт,  Вт,
Вт,  %.
%. , (3.4.3)
, (3.4.3) – число фаз вторичной обмотки (m2=3);
– число фаз вторичной обмотки (m2=3);  – коэффициент схемы (
– коэффициент схемы ( ).
). А
А ,
, 
 и активное
и активное  сопротивления, Ом, приведенные ко вторичному напряжению, и коэффициент трансформации
сопротивления, Ом, приведенные ко вторичному напряжению, и коэффициент трансформации  :
: ,
,  ,
,  , (3.4.4;3.4.5;3.4.6)
, (3.4.4;3.4.5;3.4.6) – потери короткого замыкания в трансформаторе, Вт.
– потери короткого замыкания в трансформаторе, Вт. Ом,
Ом,  Ом,
Ом, 
 В.
В. определяется:
определяется: , (3.5.1)
, (3.5.1)  – коэффициент схемы (для трёхфазных схем
– коэффициент схемы (для трёхфазных схем  ).
). В (3.5.2)
В (3.5.2) ,
,
 необходимый для ограничения выходного напряжения номинальной величины (UH=220 В), и максимальный (конечный) угол
необходимый для ограничения выходного напряжения номинальной величины (UH=220 В), и максимальный (конечный) угол  , необходимый для обеспечения минимального напряжения (Umin=22 В).
, необходимый для обеспечения минимального напряжения (Umin=22 В). эл. гр.
эл. гр.  эл. гр.
эл. гр. , где b=180 градусов
, где b=180 градусов (3.7.3.1)
(3.7.3.1) и амплитуда импульсного рабочего напряжения
и амплитуда импульсного рабочего напряжения  для фазного вентиля определяются следующим образом:
для фазного вентиля определяются следующим образом: , (3.7.3.2)
, (3.7.3.2) , (3.7.3.3)
, (3.7.3.3) – коэффициент среднего тока вентиля (
– коэффициент среднего тока вентиля ( );
);  – коэффициент, учитывающий неравномерность распределения тока по фазам и зависящий от точности работы системы управления, при допуске на несимметрию углов управления по фазам в 3 градуса
– коэффициент, учитывающий неравномерность распределения тока по фазам и зависящий от точности работы системы управления, при допуске на несимметрию углов управления по фазам в 3 градуса  ;
;  – число параллельных приборов в эквивалентном вентиле (
– число параллельных приборов в эквивалентном вентиле ( );
);  – коэффициент равномерности деления тока по полупроводниковым приборам (1);
– коэффициент равномерности деления тока по полупроводниковым приборам (1);  – коэффициент обратных напряжений данной схемы (
– коэффициент обратных напряжений данной схемы ( );
);  – число последовательно соединенных приборов в схеме эквивалентного вентиля (
– число последовательно соединенных приборов в схеме эквивалентного вентиля ( );
);  – коэффициент равномерности деления напряжения по последовательно соединенным приборам (
– коэффициент равномерности деления напряжения по последовательно соединенным приборам ( ).
).
 А,
А, В.
В. (5.14)
(5.14)  – число фаз согласующего трансформатора в контуре коммутации тока вентиля.
– число фаз согласующего трансформатора в контуре коммутации тока вентиля. А/c.
А/c. . Защитный показатель вентиля определяется по значению ударного неповторяющегося тока
. Защитный показатель вентиля определяется по значению ударного неповторяющегося тока  следующим выражением,
следующим выражением,  .
. (3.8.1.5.2.1)
(3.8.1.5.2.1)

 (3.8.1.5.2.2)
(3.8.1.5.2.2) .
. в общем случае может быть определен как отношение активной мощности, потребляемой из сети
в общем случае может быть определен как отношение активной мощности, потребляемой из сети  , к полной мощности
, к полной мощности  :
: , (3.10.3.1)
, (3.10.3.1) – потребление реактивной мощности преобразователем.
– потребление реактивной мощности преобразователем. (3.10.3.2)
(3.10.3.2) (3.10.3.3)
(3.10.3.3) ,
,  – потребление реактивной мощности согласующим трансформатором и вентильной схемой.
– потребление реактивной мощности согласующим трансформатором и вентильной схемой. (3.10.3.4)
(3.10.3.4) – число фаз вторичной обмотки трансформатора,
– число фаз вторичной обмотки трансформатора,  – ток холостого тока трансформатора, %.
– ток холостого тока трансформатора, %. :
: (3.10.3.5)
(3.10.3.5) определяется произведением коэффициентов искажения
определяется произведением коэффициентов искажения  и сдвига
и сдвига  первичного преобразователя:
первичного преобразователя: (3.10.4.6)
(3.10.4.6) при
при  <(
<( ) и
) и  при (
при ( , а
, а  (3.10.4.7)
(3.10.4.7) ,
,  и
и  углах регулирования, полученных из регулировочной характеристики. Токи нагрузки задавать:
углах регулирования, полученных из регулировочной характеристики. Токи нагрузки задавать:  0,2; 0,4; 0,6; 0,8; 1,0; 1,2
0,2; 0,4; 0,6; 0,8; 1,0; 1,2  . Напряжение на нагрузке
. Напряжение на нагрузке  определяется по внешней характеристике при принятых углах регулирования
определяется по внешней характеристике при принятых углах регулирования  и тока нагрузки
и тока нагрузки  .
.


 65 эл. гр.
65 эл. гр.




