Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Гидравлические и пневматические приводы мехатронных и робототехнических системСтр 1 из 5Следующая ⇒
Гидравлические и пневматические приводы МЕХАТРОННЫХ и робототехнических СИСТЕМ
Великий Новгород 2017
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования «Новгородский государственный университет имени Ярослава Мудрого» Политехнический институт Кафедра “Мехатроники”
Гидравлические и пневматические приводы МЕХАТРОННЫХ и робототехнических СИСТЕМ методические указания к контрольной работе по дисциплине «Гидравлические и пневматические приводы мехатронных и робототехнических систем» по направлению подготовки 15.03.06 - «Мехатроника и робототехника», ЗФО
Великий Новгород 2017
УДК 629.113 Печатается по решению РИС НовГУ
Рецензент кандидат технических наук, доцент Е.И. Никитин
«Гидравлические и пневматические приводы мехатронных и робототехнических систем»: Метод. указания к контрольной работе студентов ЗФО / Сост. А. М. Абрамов; НовГУ. – В. Новгород, 2017.– 23 с.
Приведена рабочая программа и методика выполнения контрольной работы по дисциплине «Гидравлические и пневматические приводы мехатронных и робототехнических систем». Предназначена для студентов ЗФО по направлению подготовки 15.03.06 - «Мехатроника и робототехника».
УДК 629.113
Ó Новгородский государственный университет, 2017 Ó Абрамов А.М. составление, 2017 СОДЕРЖАНИЕ Введение……………………..............................................................................5 1. Цели и задачи учебного модуля……………………………………………5 2. Рабочая программа…………………………………………………………..7 3. Вопросы для самоконтроля теоретических знаний по модулю…………. 9
4. Контрольная работа……………………………………………………..….11 Список литературы………………………………………………...……….....23
ВВЕДЕНИЕ
Методические указания предназначены для студентов ЗФО по направлению подготовки 15.03.06 - «Мехатроника и робототехника». Содержат перечень тем изучаемых в рамках дисциплины «Гидравлические и пневматические приводы мехатронных и робототехнических систем» и задание для выполнения контрольной работы.
Введение Основные понятия и определения для изучения гидро- и пневмоприводов и их элементов. Место указанных приводов в мехатронике и робототехнике. Обозначение элементов гидравлических и пневматических приводов по ЕСКД. Обобщенная схема современного автоматизированного гидро- и пневмопривода. Классификация гидравлических и пневматических приводов. Пневматические приводы Области использования пневматических систем Использование пневматических систем в промышленных технологических системах. Области наиболее благоприятного и эффективного использования пневматических систем. Использование пневматических систем: транспорт, индустрия развлечений, военная техника, техника чрезвычайных ситуаций, промышленное оборудование. Физические основы пневматики Пневматический привод. Основные свойства сжатого воздуха. Физические основы пневматического привода. Основные газовые законы. Динамика пневматического привода. Способы регулирования скорости перемещения рабочих органов исполнительных устройств пневматических систем. Состав технологических производственных пневматических систем и требования по их проектированию. Исполнительные устройства пневматических мехатронных и робототехнических систем Исполнительные устройства пневматических мехатронных и робототехнических систем. Классификация исполнительных устройств. Конструкция штоковых и бесштоковых пневматических цилиндров. Поворотные исполнительные устройства. Модульные решения исполнительных устройств. Особенности использования крепежных элементов исполнительных устройств. Мембранные приводы. Рекомендации по выбору параметров исполнительных устройств.
Гидравлические приводы Вопросы для самоконтроля теоретических знаний по модулю
«Гидравлические и пневматические приводы мехатронных И робототехнических систем»
1. Основные понятия и определения для изучения гидро- и пневмоприводов и их элементов. 2. Место указанных приводов в мехатронике и робототехнике. 3. Обозначение элементов гидравлических и пневматических приводов по ЕСКД. Обобщенная схема современного автоматизированного гидро- и пневмопривода. Классификация гидравлических и пневматических приводов. 4. Использование пневматических систем в промышленных технологических системах. Области наиболее благоприятного и эффективного использования пневматических систем. 5. Пневматический привод. Основные свойства сжатого воздуха. 6. Физические основы пневматического привода. Основные газовые законы. 7. Динамика пневматического привода. Способы регулирования скорости перемещения рабочих органов исполнительных устройств пневматических систем. 8. Состав технологических производственных пневматических систем и требования по их проектированию. 9. Исполнительные устройства пневматических мехатронных и робототехнических систем. Классификация исполнительных устройств. 10. Конструкция штоковых и бесштоковых пневматических цилиндров. Поворотные исполнительные устройства. 11. Модульные решения исполнительных устройств. 12. Мембранные приводы. 13. Распределительные пневматические устройства. Клапанный и золотниковый тип устройств. 14. Принципы построения распределительных устройств. Пилотное управление. Бистабильные и моностабильные распределители. 15. Использование распределительных устройств как элементов памяти в системах управления. 16. Ручное дублирование в распределительных устройствах. 17. Обозначение входов и выходов распределительных устройств. Основные технические характеристики распределительных устройств. 18. Обратные клапаны. Клапаны быстрого выхлопа. 19. Пневматические логические элементы. 20. Устройства подготовки сжатого воздуха. Состав устройств. Фильтры-влагоотделители. 21. Классы качества подготовки сжатого воздуха. 22. Регуляторы давления. Конструкции, принципы работы и особенности использования. Маслораспылительные устройства. Случаи их обязательного использования. 23. Физические и теоретические основы гидравлического привода. 24. Классификация гидравлических систем. Области рационального использования гидравлических систем. 25. Структура гидравлического привода. 26. Свойства жидкостей, используемых в гидроприводе. 27. Энергообеспечение гидравлических систем. Насосные станции, насосно-аккумуляторные и насосно-мультипликационные установки, пневмогидравлические системы. 28. Направляющие гидроаппараты (распределители, обратные клапаны, клапаны давления). Гидроаппараты управления расходом (клапаны давления, дроссели, регуляторы расхода, дросселирующие распределители). 29. Гидродвигатели. Гидравлические цилиндры и моторы. 30. Регулирование скорости гидродвигателя (объемное, дроссельное, ступенчатое). Синхронизация гидродвигателей.
31. Уравнение движения поршня гидравлического цилиндра. 32. Коэффициент полезного действия и тепловой расчет гидросистемы. 33. Принципы управления гидравлическими и пневматическими технологическими системами. 34. Синтез гидравлических и пневматических систем. Графоаналитический способ синтеза гидравлических и пневматических систем. 35. Основы релейно-контактного управления гидро- и пневмосистемами. Источники питания для управления устройствами гидро- и пневмоавтоматики. 36. Принципы построения принципиальных схем релейно-контактного управления в устройствах гидро- и пневмоавтоматики. Прямое и непрямое управление. 37. Управление с использованием промышленных контроллеров. Реализация сервисных функций. 38. Основы эксплуатации гидравлических и пневматических мехатронных систем.
Контрольная работа
Контрольная работа – самостоятельная работа студента по дисциплине «Гидравлические и пневматические приводы мехатронных и робототехнических систем». При выполнении контрольной работы каждый студент выполняет 8 практических упражнений. Контрольная работа оформляется в виде пояснительной записки, написанной аккуратно и четко, согласно правилам оформления текстовых конструкторских документов (ГОСТ 19600-74). Формат бумаги А4 (210 х 297 мм). Обязательно наличие полей: слева – 25 мм, справа – 15 мм, сверху и снизу – по 20 мм.
Упражнение 1. Упражнение 2. Упражнение 3.
Логическая ‘‘И”- функция
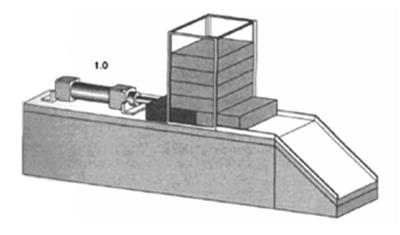
Постановка задачи. Шток поршня цилиндра 1.1 должен выдвигаться только в том случае, если деталь установлена на станке, защитная сетка опущена и оператором нажата кнопка распределителя. После отпускания кнопки распределителя или смещения защитной сетки из её нижнего положения, поршень цилиндра 1.0 должен вернуться в своё исходное положение.
Рис. 5. Эскиз объекта управления.
Задание: 1. Составьте и нарисуйте принципиальную схему системы. 2. Обозначьте элементы схемы и все присоединительные линии (каналы).
Рис. 6. Принципиальная схема системы.
Вопросы:
1. Объяснить, как поведёт себя шток цилиндра, если на короткое время нажать кнопку, а затем отпустить её. 2. Описать принцип действия системы, используя её принципиальную схему.
Упражнение 4 Функция «ИЛИ»
Постановка задачи Для подачи деталей из магазина используется цилиндр двустороннего действия. Шток поршня цилиндра выдвигается полностью при нажатии на кнопку или ножную педаль. При достижении крайнего выдвинутого положения шток должен начать втягиваться. Для опроса конечного положения должен использоваться 3\2-распределитель с управлением от рычага с роликом.
Рис. 7. Эскиз объекта управления.
Задание: 1. Составить и нарисовать принципиальную пневматическую схему системы. 2. Обозначить элементы и пронумеровать все их присоединительные линии (каналы).
Рис.8. Принципиальная схема системы.
Вопросы: 1. Как поведёт себя шток цилиндра, если на короткое время нажать кнопку или педаль, а затем отпустить? 2. Описать принцип действия системы, используя её принципиальную схему. Упражнение 5 Упражнение 6. Клапан быстрого выхлопа Постановка задачи
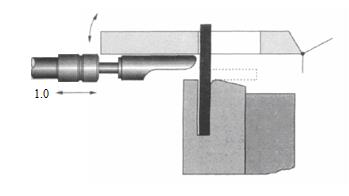
При совместном срабатывании распределителя с управлением от кнопки и концевого выключателя, управляемого рычагом с роликом, гибочный инструмент наезжает на кромка заготовки и кантует материал. Инструмент приводится в движение штоком цилиндра двустороннего действия. Для повышения скорости выдвижения штока в схеме должен быть использован клапан быстрого выхлопа. Скорость втягивания штока поршня должна быть регулируемой. Если какая-либо из кнопок будет отпущена, шток цилиндра медленно возвращается в исходное положение.
Рис.11. Эскиз объекта управления.
Составить и нарисовать принципиальную схему системы. Обозначить элементы и пронумеровать все их присоединительные линии (каналы). Описать принцип действия системы, используя её принципиальную схему.
Задание. 1. Как поведёт себя шток цилиндра, если после начала движения штока отпустить кнопку?
Рис.12. Принципиальная схема системы. Вопросы: 1. Описать принцип действия системы, используя её принципиальную схему. 2. Как поведёт себя шток цилиндра, если после начала движения штока отпустить кнопку? Упражнение 7. Управление по давлению
Постановка задачи. Тиснение на пластмассовые детали наносится штампом, приводимым в движение цилиндром двустороннего действия. Штамп опускается на деталь при нажатии кнопки, а возвращается в исходное положение автоматически, когда шток достигнет крайнего положения и давление в поршневой полости повысится до установленного значения. Достижение крайнего выдвинутого положения штока контролируется концевым выключателем, управляемым от рычага с роликом. Усилие тиснения должно быть настраиваемым. Давление в поршневой полости цилиндра должно измеряться с помощью манометра.
Рис.13. Эскиз объекта управления.
Задание: 1.Составить и нарисовать принципиальную схему системы. 2. Обозначить элементы и пронумеровать все их присоединительные линии (каналы).
Рис.14. Принципиальная схема системы. Вопросы: 1. Как поведёт себя шток цилиндра, если на короткое время нажать кнопку, а затем отпустить её? 2. Описать принцип действия системы, используя её принципиальную схему. Упражнение 8. Клапан выдержки времени Постановка задачи. Для прижимания склеиваемых деталей друг к другу используется цилиндр двустороннего действия. При нажатии на кнопку шток поршня прессового цилиндра выдвигается. Когда пресс прижмет деталь, он должен остаться в этом положении в течении 6 секунд, после чего шток должен автоматически вернуться в исходное положение. Начало нового цикла возможно только при условии полного втягивания штока и сохранении этого положения в течении 5 секунд. За это время склеенные детали вручную вынимаются из пресса, а на их место устанавливаются новые. Выдвижение штока цилиндра должно происходить медленно, а втягивание относительно быстро, но с возможностью регулирования скорости.
Рис. 15. Эскиз объекта управления.
Задание: 1. Составить и нарисовать принципиальную схему системы. 2. Обозначить элементы схемы и пронумеровать все их присоединительные линии (каналы).
Рис.16. Принципиальная схема системы.
Вопросы: 1. Как поведёт себя шток цилиндра, если на короткое время нажать кнопку, а затем отпустить её? 2. Описать принцип действия системы, используя её принципиальную схему.
СПИСОК ЛИТЕРАТУРЫ 1. Гидравлика: учебник: для вузов: в 2 т. Т. 1: Основы механики жидкостей и газов / В. И. Иванов [и др.]. - М.: Академия, 2012. – 188 с. 2. Гидравлика: учебник: для вузов: в 2 т. Т. 2: Гидравлические машины и приводы / В. И. Иванов [и др.]. - М.: Академия, 2012. – 282 с. 3. Гидравлика, гидромашины и гидроприводы: учеб. для техн. вузов / авт.:Т. М. Башта [и др.]. - 2-е изд., перераб. - М.:Альянс, 2013. – 422с. 4. Беленков Ю. А. Гидравлика и гидропневмопривод: учебник: по спец. 190201 - "Автомобиле- и тракторостроение" / Ю. А. Беленков, А. В. Лепешкин, А. А. Михайлин. - М.: БАСТЕТ, 2013. – 405 с. 5. Клюкин В.Ю. Гидравлические и пневматитические элементы и приводы: Учеб. пособие. Ч.1. Пневматические приводы /В. Ю. Клюкин, В.С. Харитонов, А.М.Абрамов; НовГУ им. Ярослава Мудрого.–Великий Новгород, 2016. – 98 с. 6. Клюкин В.Ю. Гидравлические и пневматитические элементы и приводы: Учеб. пособие. Ч.2. Гидравлические приводы /В. Ю. Клюкин, В.С. Харитонов, А.М.Абрамов; НовГУ им. Ярослава Мудрого.–Великий Новгород, 2017. – 232 с. 7. Клюкин В. Ю. Гидропневмопривод. Цикловые системы управления пневмоприводом: учеб. пособие / В. Ю. Клюкин, А. В. Смородов, В. С. Харитонов; С.-Петерб. гос. политехн. ун-т. - СПб.: Издательство Политехн. ун-та, 2009. – 47 с. 8. Пневмогидропривод и автоматика / В. Ю. Клюкин, В. С. Харитонов — СПб. Изд-во Политехн. ун-та, 2007 9. Гидравлика и гидропневмопривод: учебник: для вузов / авт.: Т. А. Артемьева [и др.]; под ред. С. П. Стесина. - 5-е изд., перераб. - М.: Академия, 2014. – 348 с. 10. Лозовецкий, В. В. Гидро- и пневмосистемы транспортно-технологических машин: учеб. пособие для вузов / В. В. Лозовецкий. - СПб.: Лань, 2012. – 554 с. 11. Гусев А. А. Гидравлика. Теория и практика: учеб. для вузов: по техн. направлениям и спец. / А. А. Гусев; Моск. гос. строит. ун-т. - 2-е изд., испр. и доп. - М.: Юрайт, 2015. – 285 с. Гидравлические и пневматические приводы МЕХАТРОННЫХ и робототехнических СИСТЕМ
Великий Новгород 2017
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования «Новгородский государственный университет имени Ярослава Мудрого» Политехнический институт Кафедра “Мехатроники”
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 563; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.84.155 (0.097 с.) |