Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Выходные каскады систем автоматического управленияСтр 1 из 7Следующая ⇒
СХЕМОТЕХНИКА Конспект лекций
Санкт-Петербург 2018 г.
СОДЕРЖАНИЕ ВВЕДЕНИЕ …………………………………………………………………….. 3 ВЫХОДНЫЕ КАСКАДЫ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ…………………………………………………………………. 4 Режимы работы усилителей мощности (УМ). ……………………………… 4 Усилитель мощности с трансформаторным выходом, работающий в режимах класса А и В................................................................ 7 ЭЛЕКТРИЧЕСКИЕ ФИЛЬТРЫ……………………………………………….. 8 Основные понятия и определения…………………………………………….. 8 Активные фильтры НЧ первого порядка……………………………………. 10 Активные фильтры НЧ второго порядка…………………………………..... 12 Гираторы……………………………………………………………………… 14 СЕТЕВЫЕ ИСТОЧНИКИ ПИТАНИЯ ЭЛЕКТРОННЫХ СХЕМ………… 16 Сетевые трансформаторы……………………………………………………. 16 Одно- и двухполупериодные выпрямители………………………………… 17 Емкостной сглаживающий фильтр…………………………………………. 20 СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ……………………………………… 22 Параметрический стабилизатор напряжения……………………………... 22 Компенсационный стабилизатор напряжения ……………………………. 25 ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ И ИХ КЛАССИФИКАЦИЯ…………………………………………………. 27 Резистивные датчики ……………………………………………………….. 27 Мостовая схема включения. ………………………………………………… 29 Потенциометрические датчики……………………………………………….31 Индуктивные датчики ……………………………………………………….. 34 Емкостные датчики ………………………………………………………….. 36 ДИСКРЕТНЫЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ ПЕРЕМЕЩЕНИЙ………………………………….. 37 Абсолютные датчики углового положения………………………………… 37 Преобразователи углового перемещения накопительного типа…………. 42 Литература……………………………………………………………………. 43 Введение Данный курс лекций позволяет получить представление о принципе работы ряда электронных устройств, входящих в состав типовой системы автоматического управления. В самых общих чертах контур автоматического управления содержит датчик некоторой физической величины, устройство сравнения ее значения с заданным, предварительный усилитель сигнала ошибки, возможно, некоторый функциональный преобразователь (например, дифференциатор, интегратор, частотный фильтр и т.д.), усилитель мощности и исполнительное устройство. Кроме того все составные части системы должны получать энергию от некоторого источника питания.
Значительное количество информации по маломощным усилителям и функциональным преобразователям изучалось в курсе «Электроника». В текущем курсе предлагается рассмотреть: - аналоговые и цифровые датчики для преобразования различных неэлектрических физических величин в электрические, - активные электрические фильтры - варианты усилителей мощности для переменного аналогового сигнала - простейшие источники питания, включая стабилизированные
Акцент сделан на основных принципах построения схем, без углубления в вопросы их усовершенствования. Выходные каскады систем автоматического управления Целью работы систем автоматического управления является управление каким-либо параметром объекта (скоростью, перемещением, температурой и т.д.). Непосредственно эту задачу выполняет исполнительное устройство (двигатель, нагреватель и др.). В системах с электрическим управлением сигнал на исполнительное устройство поступает с силового выходного каскада системы управления, являющегося усилителем мощности.
Электрические фильтры Основные понятия и определения Электрический фильтр – это четырехполюсник, пропускающий из входной цепи в выходную определенный диапазон частот сигналов в виде напряжения или тока. Электрические фильтры классифицируются по нескольким группам (табл.1): · низкочастотные – это такие четырехполюсники, которые беспрепятственно пропускают частоты от нуля до некоторой частоты среза fср; · высокочастотные – это такие четырехполюсники, которые пропускают частоты от частоты среза (fср) до бесконечности; · полосовые – это такие четырехполюсники, которые пропускают частоты от частоты f1 до 22, а остальные частоты не пропускают;
· заграждающие – это четырехполюсники, противоположные полосовым, т.е. частоты от частоты f1 до f2 не пропускают, а все остальные пропускают. В таблице 1 зона пропускания обозначена как ЗП, а зона заграждения – как ЗЗ. Таблица 1
Пассивный фильтр — электронный фильтр, состоящий только из пассивных компонентов, таких как катушки индуктивности, конденсаторы и резисторы. Пассивные фильтры не требуют никакого источника энергии для своего функционирования. В отличие от активных фильтров в пассивных фильтрах не происходит усиления сигнала по мощности. Обычно пассивные фильтры являются линейными. Пассивные фильтры используются повсеместно в радио- и электронной аппаратуре, например в акустических системах, источниках бесперебойного питания и т. д. Активные RC фильтры, т.е. фильтры, имеющие в своем составе усилительные элементы, применяются на частотах ниже 100 кГц. Применение положительной обратной связи позволяет увеличивать добротность полюса фильтра. При этом полюс фильтра можно реализовать на RC элементах, которые значительно дешевле, чем катушки индуктивности. Кроме того, величина емкости конденсатора, входящего в состав активного фильтра, может быть уменьшена, так как в ряде случаев усилительный элемент позволяет увеличивать ее эффективное значение. Применение конденсаторов с малой емкостью позволяет выбирать их типы, обладающие малыми потерями и высокой стабильностью параметров. При проектировании активных фильтров фильтр заданного порядка разбивается на звенья первого и второго порядка. Результирующая АЧХ получится перемножением характеристик всех звеньев. Применение активных элементов (транзисторов, операционных усилителей) позволяет исключить влияние звеньев друг на друга и проектировать их независимо. Это обстоятельство значительно упрощает и удешевляет проектирование и настройку активных фильтров Активные фильтры НЧ первого порядка. На рисунке 4 приведена схема активного RC фильтра нижних частот первого порядка на операционном усилителе. Величинами сопротивления резистора R2 и емкости конденсатора C1 можно задать его частоту среза, то есть определить полосу пропускания данной схемы активного фильтра.
В схеме, приведенной на рисунке 4, коэффициент усиления определяется отношением резисторов R2 и R1:
а эффективная величина емкости конденсатора C1 увеличивается в коэффициент усиления плюс единица раз за счет эффекта Миллера.
Следует отметить, что подобный способ увеличения значения емкости приводит к уменьшению динамического диапазона схемы в целом. Поэтому к данному способу увеличения емкости конденсатора прибегают в крайних случаях. Обычно обходятся интегрирующей RC-цепочкой, в которой уменьшение частоты среза достигается увеличением сопротивления резистора при постоянном значении емкости конденсатора. Для того, чтобы устранить влияние цепей нагрузки, на выходе RC-цепочки обычно ставится буферный усилитель с единичным коэффициентом усиления по напряжению (рис.5).
Тем не менее, при достаточно низкой частоте среза фильтра низких частот может потребоваться большое значение емкости конденсатора. Электролитические конденсаторы, обладающие значительной емкостью, не подходят для создания фильтров из-за большого разброса параметров и низкой стабильности. Конденсаторы, выполненные на основе керамики с большим значением электрической постоянной ε, тоже не отличаются стабильностью значения емкости. Поэтому применяются высокостабильные конденсаторы малой емкости, и их значение увеличивается в схеме активного фильтра, приведенной на рисунке 4. Активные фильтры НЧ второго порядка. Еще больше распространены схемы активных фильтров второго порядка, позволяющие реализовать большую крутизну спада АЧХ по сравнению со схемой первого порядка. Наибольшее распространение получила схема Саллена-Кея, приведенная на рисунке 6.
Амплитудно-частотная характеристика этой схемы подобна АЧХ звена второго порядка пассивного LC фильтра. Ее вид приведен на рисунке 7.
Частота резонанса полюса при этом может быть определена из формулы:
а его добротность:
Частоты нулей в идеальном случае равны бесконечности. В реальной схеме зависят от конструкции печатной платы и параметров использованных резисторов и конденсаторов. Схема Саллена-Кея позволяет максимально упростить выбор элементов схемы. Обычно конденсаторы C1 и C2 выбирают одинаковой емкости. Резисторы R1 и R2 выбирают одинакового сопротивления. Сначала задаются значением емкостей C1 и C2. Как уже обсуждалось выше, их емкости стараются выбрать минимальными. Именно такие конденсаторы обладают максимально стабильными характеристиками. Затем определяют значение сопротивления резисторов R1 и R2:
Резисторы R3 и R4 в схеме Саллена-Кея определяют коэффициент усиления по напряжению точно так же, как и в обычной схеме инвертирующего усилителя. В схеме активного фильтра именно эти элементы будут определять добротность полюса (Qp).
В схеме активного RC фильтра усилитель охвачен как отрицательной, так и положительной обратной связью. Глубина положительной обратной связи определяется соотношением резисторов R1R2 или конденсаторов C1C2. Если добротность полюса задавать за счет этого соотношения (отказаться от равенства сопротивлений или конденсаторов), то операционный усилитель можно охватить 100% отрицательной обратной связью и обеспечить единичный коэффициент усиления активного элемента. Это позволит упростить схему звена второго порядка. Упрощенная схема активного RC фильтра второго порядка показана на рисунке 8.
К сожалению, при единичном коэффициенте усиления можно задаваться только одинаковыми значениями сопротивлений R1 и R2, а необходимую добротность получать соотношением емкостей. Поэтому расчет начинается с задания номинального значения резисторов R1 = R2 = R. Тогда емкости можно рассчитать следующим образом:
Гираторы Применение катушек индуктивности в малогабаритных устройствах затруднено. Габариты катушек относительно велики, и поэтому их трудно поместить внутри интегральной микросхемы. Однако катушкой индуктивности можно считать любое устройство, ток через которое пропорционален напряжению, приложенному к нему, умноженному на время действия этого напряжения. Существуют красивые схемотехнические решения, позволяющие изготовить из конденсаторов, резисторов и операционных усилителей устройство, обладающее описанным свойством. Такая схема может применяться везде, где применяется катушка индуктивности. Исключением являются силовые устройства, так как интегральный аналог не накапливает энергию в отличие от настоящей катушки индуктивности. Изменение тока эмулируется за счет потребления энергии из цепей питания. Схема простейшего гиратора, интегрального аналога катушки индуктивности, приведена на рис.9
Рисунок 9 Схема на рис. 9А - простейший пример гиратора. Она действительно имитирует катушку, соединенную с общим проводом, причем не только ее индуктивность, но и внутреннее омическое сопротивление. Для типичных операционных усилителей этот резистор не может быть меньше нескольких килоом. Поэтому получается катушка с достаточно большим внутренним сопротивлением. В приведенной схеме сопротивление резистора R1 - определяется нагрузочной способностью операционного усилителя, резистор R2 - порядка 10 кОм. Принцип работы схемы: приложенное напряжение постепенно заряжает конденсатор C1 через резистор R3. Напряжение на выходе операционного усилителя, благодаря отрицательной обратной связи, меняется так, чтобы поддерживать равенство потенциалов на обоих входах операционного усилителя. Поэтому напряжение на R1 практически равно напряжению на конденсаторе C1 (напряжение на R2 близко к нулю ввиду малых входных токов операционного усилителя). Ток через резистор R1 по закону Ома равен напряжению, деленному на сопротивление. Таким образом, ток через резистор постепенно нарастает со временем пропорционально напряжению на С1. Резистор R1 выбирается много меньше, чем R3, поэтому входной ток схемы практически равен току через R1. Полное входное сопротивление схемы Zвх = (R1+jωC1R1R3), то есть эквивалентная индуктивность катушки Lэкв = C1R1R3, а ее омическое сопротивление равно сопротивлению резистора R1.
Нередко возникает необходимость получить «подвешенную» катушку индуктивности, у которой ни один из выводов не соединен с общим проводом. Для этого можно применить схему, изображенную на рис.9В. Это две схемы по рис.9А, включенные навстречу друг другу. При этом важно обеспечить идентичность номиналов используемых конденсаторов и резисторов. Желательно применение элементов с погрешностью параметров не более 1%. Во всех схемах используется операционный усилитель с высоким входным сопротивлением. Сетевые трансформаторы. Сетевые трансформаторы до недавнего времени можно было встретить практически в любом электроприборе. С помощью именно сетевого трансформатора (обычно однофазного) напряжение бытовой сети 220В с частотой 50 Гц понижается до уровня, необходимого электронной схеме, например 5, 12, 24 или 48 вольт. Сетевые трансформаторы относятся к низкочастотным трансформаторам. Часто сетевые трансформаторы выполняются с несколькими вторичными обмотками, чтобы несколько источников напряжения можно было бы использовать для питания различных частей схемы. Современные сетевые трансформаторы конструктивно выполняются на Ш-образных, стержневых или тороидальных сердечниках из набора пластин электротехнической стали, на которые навиваются обмотки. Тороидальная форма магнитопровода позволяет получить более компактный трансформатор. Если сравнить трансформаторы равной габаритной мощности на тороидальном и на Ш-образном сердечниках, то тороидальный будет занимать меньше места, к тому же площадь поверхности тороидального магнитопровода полностью охватывается обмотками, нет пустого ярма, как в случае с броневым Ш-образным или стержневым сердечниками. Однако технологически изготовление тороидального трансформатора сложнее и дороже, чем броневого или стержневого. Стабилизаторы напряжения
Стабилизаторы предназначены для стабилизации постоянного напряжения на нагрузке при колебаниях сетевого напряжения и изменении потребляемого нагрузкой тока. Стабилизаторы подразделяются на параметрические и компенсационные. Стабильность выходного напряжения оценивают коэффициентом стабилизации Кст.
Резистивные датчики Основными типами резистивных датчиков являются потенциометрические датчики, тензорезисторы и терморезисторы. Потенциометрические датчики применяют чаще всего для измерения перемещений. Главное их достоинство в простоте и отсутствии необходимости последующего усиления. Основными недостатками их являются наличие скользящего электрического контакта, необходимость относительно больших перемещений движка и значительного усилия для его перемещения. Тензорезистор представляет собой тонкую (15-60 мк) проволоку, уложенную зигзагом и наклеенную на специальную бумагу. Такой элемент приклеивают прочным клеем к детали для измерения ее деформации. Измерение деформации основано на изменении сопротивления проволочки при ее растяжении или сжатии, происходящем при деформации детали. Тензодатчики широко применяют для измерения деформации деталей в самых различных областях техники. Они характеризуются малым относительным изменением сопротивления не более 1%, что требует измерительных схем высокой чувствительности. Статическая характеристика проволочных датчиков имеет линейный вид, т.е. чувствительность проволочных датчиков практически постоянна. Для измерения применяют проволочные датчики из материала типа константана с небольшой чувствительностью, но с малым температурным коэффициентом сопротивления. Сопротивление таких датчиков обычно равно 100 - 200 Ом. С целью повышения чувствительности применяют датчики из сплавов типа элинвара, характеризуемых относительно высоким температурным коэффициентом сопротивления. Сопротивление таких датчиков выбирают равным 500-1000 Ом. Для увеличения чувствительности применяют включение в мостовую схему двух или даже четырех одинаковых проволочных датчиков. Терморезисторы получили широкое распространение для измерения температур различных сред в пределах от - 50 до +800° С. Действие электрических терморезисторов основано на свойстве некоторых материалов менять свое электрическое сопротивление при изменении температуры. Для изготовления термометров сопротивления используют медь, никель, сталь, платину и другие металлы. Медь применяют при измерении температур в пределах до 180° С, сталь и никель до 300° С в атмосфере, свободной от влаги и коррозионных газов, особенно сернистых; платину от - 200 до +900° С в агрессивных средах. Сопротивление таких датчиков выбирают равным 40-100 Ом. В последнее время в качестве термометров сопротивления используют термисторы, которые изготовляют из полупроводников, представляющих собой оксиды, сульфиды, карбиды металлов с большим отрицательным температурным коэффициентом. Термисторы изготовляют прессованием и обжигом измельченных и очищенных материалов, а затем покрывают защитным слоем эмали или лака, имеющих одинаковый с исходными материалами коэффициент расширения.
Мостовая схема включения.
Одна из наиболее распространенных схем включения резистивных датчиков – мостовая.
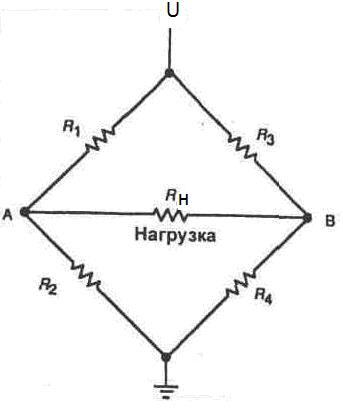
Стандартная мостовая схема изображена на рисунке 23.
Рисунок 23
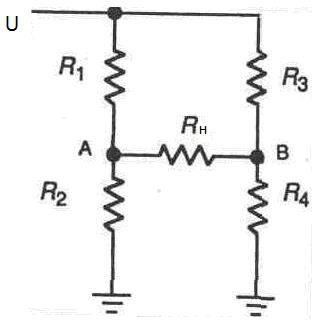
Мостовая схема — это по существу два делителя напряжения, параллельно подключенные к источнику питания. Это четко можно видеть по мостовой схеме, представленной в виде, показанном на рисунке 24. Выходной сигнал снимается между двумя выходами делителей напряжения (точки А и В). Такой тип выхода называется дифференциальным (или симметричным) выходом.
Рисунок 24
Основное нейтральное состояние в мостовой схеме называется равновесием моста. Уравновешенный мост — это такой мост, выходное напряжение которого равно нулю. Такое состояние имеет место в том случае, когда выходное напряжение одного делителя напряжения равно выходному напряжению другого делителя напряжения, относительно массы. Если ввести в мостовую схему один или больше резистивных элементов с варьируемым сопротивлением, можно легко привести мост к такому уравновешенному состоянию. Равновесие моста имеет место в том случае, если сопротивления моста связаны следующим соотношением: R1/R2= R3/R4 Если вместо одного из резисторов моста (например, R2), включить резистивный датчик (скажем, терморезистор), а вместо R1 – подстроечный резистор и затем уравновесить мост, то далее любое изменение сопротивление датчика приведет к разбалансировке моста и появлению напряжения на нагрузке. Причем полярность этого напряжения будет зависеть от того, в какую сторону изменилось сопротивление. Таким образом напряжение на нагрузке будет являться мерой отклонения сопротивления датчика от исходного значения. В нашем примере это напряжение будет также мерой отклонения температуры от исходного значения. Если относительное изменение сопротивления составляет не более единиц процентов, то зависимость напряжения на нагрузке от изменения сопротивления можно считать линейной. По такому принципу строятся мостовые схемы измерительных преобразователей температуры (на терморезисторах), деформации (на тензорезисторах), магнитного поля (на магниторезисторах) и т.д.
Потенциометрические датчики Потенциометрический датчик представляет собой переменный резистор, к которому приложено питающее напряжение, его входной величиной является линейное или угловое перемещение токосъемного контакта, а выходной величиной – напряжение, снимаемое с этого контакта, изменяющееся по величине при изменении его положения. Потенциометрические датчики предназначены для преобразования линейных или угловых перемещений в электрический сигнал. Электрическая схема потенциометрического датчика приведена на рис. 25
Рисунок 25
По способу выполнения сопротивления потенциометрические датчики делятся на - проволочные с непрерывной намоткой; - с резистивным слоем.
Проволочные потенциометрические датчики предназначены для более точных измерений. Как правило их конструкции представляют собой каркас из гетинакса, текстолита или керамики, на который в один слой, виток к витку намотана тонкая проволока, по зачищенной поверхности которой скользит токосъемник. Диаметр проволоки определяет класс точности потенциометрического датчика (высокий-0,03-0,1 мм, низкий 0,1-0,4 мм). Материалы провода: манганин, фехраль, сплавы на основе благородных металлов. Токосъемник выполнен из более мягкого материала, чтобы исключить перетирание провода. Преимущества потенциометрических датчиков: -простота конструкции; -малые габариты и вес; -высокая степень линейности статических характеристик; -стабильность характеристик; -возможность работы на переменном и постоянном токе. Недостатки потенциометрических датчиков: -наличие скользящего контакта, который может стать причиной отказов из-за окисления контактной дорожки, перетирания витков или отгибания ползунка; -искажение статической характеристики под влиянием нагрузки; -сравнительно небольшой коэффициент преобразования; -наличие зоны нечувствительности у проволочных потенциометрических датчиков.
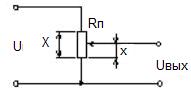
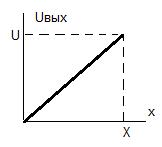
Статическую характеристику нереверсивного потенциометрического датчика (См. рисунок 26) рассмотрим на примере потенциометрического датчика с непрерывной намоткой. К зажимам потенциометра прикладывается переменное или постоянное напряжение U. Входной величиной является перемещение X, выходной − напряжение Uвых. Для режима холостого хода статическая характеристика датчика линейна т.к. справедливо соотношение: Uвых=(U/Rп)r, где Rп- сопротивление обмотки; r- сопротивление части обмотки. Учитывая, что r/Rп=x/l, где l - общая длина намотки, получим Uвых=(U/l)x=Kx [В/м], где К - коэффициент преобразования (передачи) датчика.
Рисунок 26
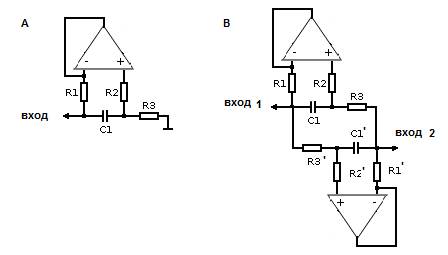
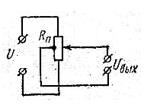
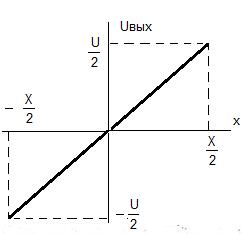
Очевидно, что такой датчик не будет реагировать на изменение знака входного сигнала (датчик нереверсивный). Существуют схемы чувствительные к изменению знака, например, схема на рис. 27. Статическая характеристика такого датчика имеет вид представленный на рисунке 28
Рисунок 27
Рисунок 28
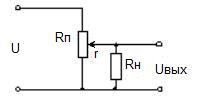
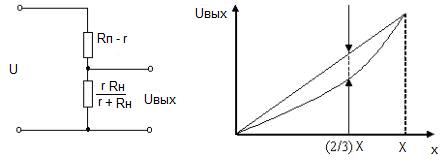
Полученные идеальные характеристики могут существенно отличатся от реальных за счет наличия различного рода погрешностей: 1.Зона нечувствительности. Выходное напряжение меняется дискретно от витка к витку, т.е. возникает эта зона, когда при малой величине перемещения Uвых не меняется. Величина скачка напряжения определяется по формуле: DU=U/W, где W- число витков. Порог чувствительности определяется диаметром намоточного провода 2. Неравномерность статической характеристики из-за непостоянства диаметра провода, удельного сопротивления и шага намотки. 3. Погрешность от люфта, возникающего между осью вращения движка и направляющей втулкой (для уменьшения используют поджимные пружины). 4. Погрешность от трения. При малых мощностях элемента приводящего в движение щетку потенциометрического датчика может возникать за счет трения зона застоя. 5. Погрешность от влияния нагрузки. При активной нагрузке (рис. 29) изменяется статическая характеристика (рис.30). Т.е. Uвых=f(r) зависит от Rн. При Rн>>Rп можно показать, что Uвых=(U/Rп)r; При Rн, сравнимом с R, зависимость нелинейна, и максимальная погрешность датчика будет при отклонении движка на (2/3))l. Обычно выбирают Rн/Rп=10…100. Величина ошибки при x=(2/3)l может быть определена из выражения: E=4/27η, где η=Rп/Rн - коэффициент нагрузки.
Рисунок 29
а б a - Эквивалентная схема потенциометрического датчика с нагрузкой, б - Влияние нагрузки на статическую характеристику потенциометрического датчика. Рисунок 30
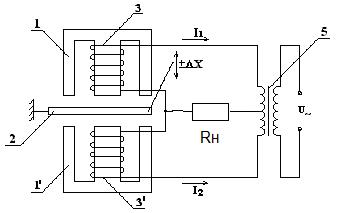
Индуктивн ые датчики. Принцип их работы основан на изменении индуктивного сопротивления катушки с ферромагнитным сердечником. Датчики индуктивности широко применяют благодаря их существенным достоинствам: простоте, надежности и отсутствию скользящих контактов; возможности непосредственного использования показывающих приборов за счет относительно большой величины отдаваемой электрической мощности; возможности работы на переменном токе промышленной частоты. Основной областью применения индуктивных датчиков является измерение угловых и линейных механических перемещений. Изменение входного параметра в датчиках индуктивности преобразуется в изменение индуктивности катушки благодаря перемещению якоря, сердечника или катушки. Индуктивные датчики применяют только на относительно низких частотах (до 3000-5000 Гц), так как на высоких частотах резко возрастают потери в стали на перемагничивание и реактивное сопротивление обмотки. Для устранения недостатков, свойственных рассмотренному датчику индуктивности, которые состоят в том, что для измерения перемещения якоря в обоих направлениях необходимо иметь начальный воздушный зазор, т.е. и начальную силу тока, из-за чего создается неудобство в измерении, значительные погрешности от колебаний температуры и питающего напряжения, а также для устранения электромеханического усилия притяжения якоря, зависящего от величины воздушного зазора, применяют дифференциальный индуктивный датчик. Дифференциальные индуктивные датчики (рис.31) представляет собой совокупность двух нереверсивных датчиков и выполняются в виде системы, состоящей из двух магнитопроводов с общим якорем и двумя катушками.
Рисунок 31
Для питания дифференциально-индуктивного датчика используют трансформатор 5 с выводом средней точки на вторичной обмотке. Между ним и общим концом обеих катушек включается прибор 4. Воздушный зазор 0,2-0,5 мм. При среднем положении якоря, когда воздушные зазоры одинаковы, индуктивные сопротивления катушек 3 и 3' одинаковы следовательно величины токов в катушках равны I1=I2 и результирующий ток в приборе равен 0. При небольшом отклонении якоря в ту или иную сторону под действием контролируемой величены Х меняются величины зазоров и индуктивностей, прибор регистрирует разностный ток I1-I2, он является функцией смещения якоря от среднего положения. Разность токов создает падение напряжения на нагрузке Rн. Характеристика индуктивного датчика имеет вид, показанный на рис 32
Рисунок 32 Полярность выходного тока остается неизменной независимо от знака изменения полного сопротивления катушек. При изменении направления отклонения якоря от среднего положения меняется на противоположную (на 180°) фаза тока на выходе датчика. При использовании фазочувствительных выпрямительных схем можно получить индикацию направления перемещения якоря от среднего положения. Информативная способность индуктивного датчика в значительной мере определяется его погрешностью преобразования измеряемого параметра. Суммарная погрешность индуктивного датчика складывается из большого числа составляющих погрешностей. Можно выделить следующие погрешности индуктивного датчика: 1) Погрешность от нелинейности характеристики. Является существенной и в большинстве случаев определяет диапазон измерения датчика. 2) Температурная погрешность. Ввиду большого числа зависимых от температуры параметров составных частей датчика может достичь больших величин и является существенной. 3) Технологические погрешности. Возникают вследствие технологических отклонений взаимного положения деталей датчика, разброса параметров деталей и обмоток при изготовлении, влияния технологических зазоров и натягов в соединении деталей и в направляющих. Емкостные датчики
представляет собой обычный плоский или цилиндрический конденсатор, изменение емкости которого происходит либо за счет перемещения одной из пластин, либо за счет изменения диэлектрической постоянной среды ε, находящейся между пластинами.
Для двухобкладочного плоского конденсатора электрическая емкость определяется выражением: С = ε0ε S / h где ε 0 - диэлектрическая постоянная; ε - относительная диэлектрическая проницаемость среды между обкладками; S - активная площадь обкладок; h - расстояние между обкладками конденсатора. Зависимости C (S) и C (h) используют для преобразования механических перемещений в изменение емкости.
Емкостные датчики, также как и индуктивные, питаются переменным напряжением (обычно повышенной частоты - до десятков мегагерц). В качестве измерительных схем обычно применяют дифференциальные схемы (подобные примененным в дифференциальных индуктивных датчиках) и схемы с использованием резонансных контуров. В последнем случае, как правило, используют зависимость частоты колебаний генератора от емкости резонансного контура, т.е. датчик имеет частотный выход.
Достоинства емкостных датчиков - простота, высокая чувствительность и малая инерционность. Недостатки - влияние внешних электрических полей, относительная сложность измерительных устройств.
Емкостные датчики применяют для измерения угловых перемещений, очень малых линейных перемещений, вибраций, скорости движения и т. д.,
Емкостные преобразователи, диэлектрическая проницаемость ε которых изменяется за счет перемещения, деформации или изменения состава диэлектрика, применяют в качестве датчиков уровня непроводящих жидкостей, сыпучих и порошкообразных материалов, толщины слоя непроводящих материалов (толщиномеры), а также контроля влажности и состава вещества.
СХЕМОТЕХНИКА Конспект лекций
Санкт-Петербург 2018 г.
СОДЕРЖАНИЕ ВВЕДЕНИЕ …………………………………………………………………….. 3 ВЫХОДНЫЕ КАСКАДЫ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ…………………………………………………………………. 4 Режимы работы усилителей мощности (УМ). ……………………………… 4 Усилитель мощности с трансформаторным выходом, работающий в режимах класса А и В................................................................ 7 ЭЛЕКТРИЧЕСКИЕ ФИЛЬТРЫ……………………………………………….. 8 Основные понятия и определения…………………………………………….. 8 Активные фильтры НЧ первого порядка……………………………………. 10 Активные фильтры НЧ второго порядка…………………………………..... 12 Гираторы……………………………………………………………………… 14 СЕТЕВЫЕ ИСТОЧНИКИ ПИТАНИЯ ЭЛЕКТРОННЫХ СХЕМ………… 16 Сетевые трансформаторы……………………………………………………. 16 Одно- и двухполупериодные выпрямители………………………………… 17 Емкостной сглаживающий фильтр…………………………………………. 20 СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ……………………………………… 22 Параметрический стабилизатор напряжения……………………………... 22 Компенсационный стабилизатор напряжения ……………………………. 25 ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ И ИХ КЛАССИФИКАЦИЯ…………………………………………………. 27 Резистивные датчики ……………………………………………………….. 27 Мостовая схема включения. ………………………………………………… 29 Потенциометрические датчики……………………………………………….31 Индуктивные датчики ……………………………………………………….. 34 Емкостные датчики ………………………………………………………….. 36 ДИСКРЕТНЫЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ ПЕРЕМЕЩЕНИЙ………………………………….. 37 Абсолютные датчики углового положения………………………………… 37 Преобразователи углового перемещения накопительного типа…………. 42 Литература……………………………………………………………………. 43
|
|||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 85; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.30.253 (0.229 с.) |