
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Описание лабораторной установки. Методика проведения эксперимента
Методика проведения эксперимента Обработка экспериментальных данных Содержание отчёта 9. Контрольные вопросы ЛАБОРАТОРНАЯ РАБОТА № 3 МОНТАЖ АППАРАТОВ МЕТОДОМ ВЫЖИМАНИЯ Введение Метод выжимания со скользящим по рельсам подъёмным порталом является разновидностью безъякорных способов подъёма вертикальных аппаратов. Основными преимуществами метода выжимания являются: 1) метод можно применять в стеснённых условиях монтажной площадки; 2) отсутствие затрат на устройство расчалок и якорей для удержания портала в рабочем положении; 3) контроль работы полиспастов, расположенных на небольшой высоте, и испытания такелажных средств в начале подъёма; 4) небольшие горизонтальные усилия на фундамент аппарата; 5) возможность равномерного распределения нагрузок по высоте аппарата за счёт применения тросовых подвесок.
Цель работы Определение усилия в такелажной оснастке при различных углах подъёма колонны методом выжимания.
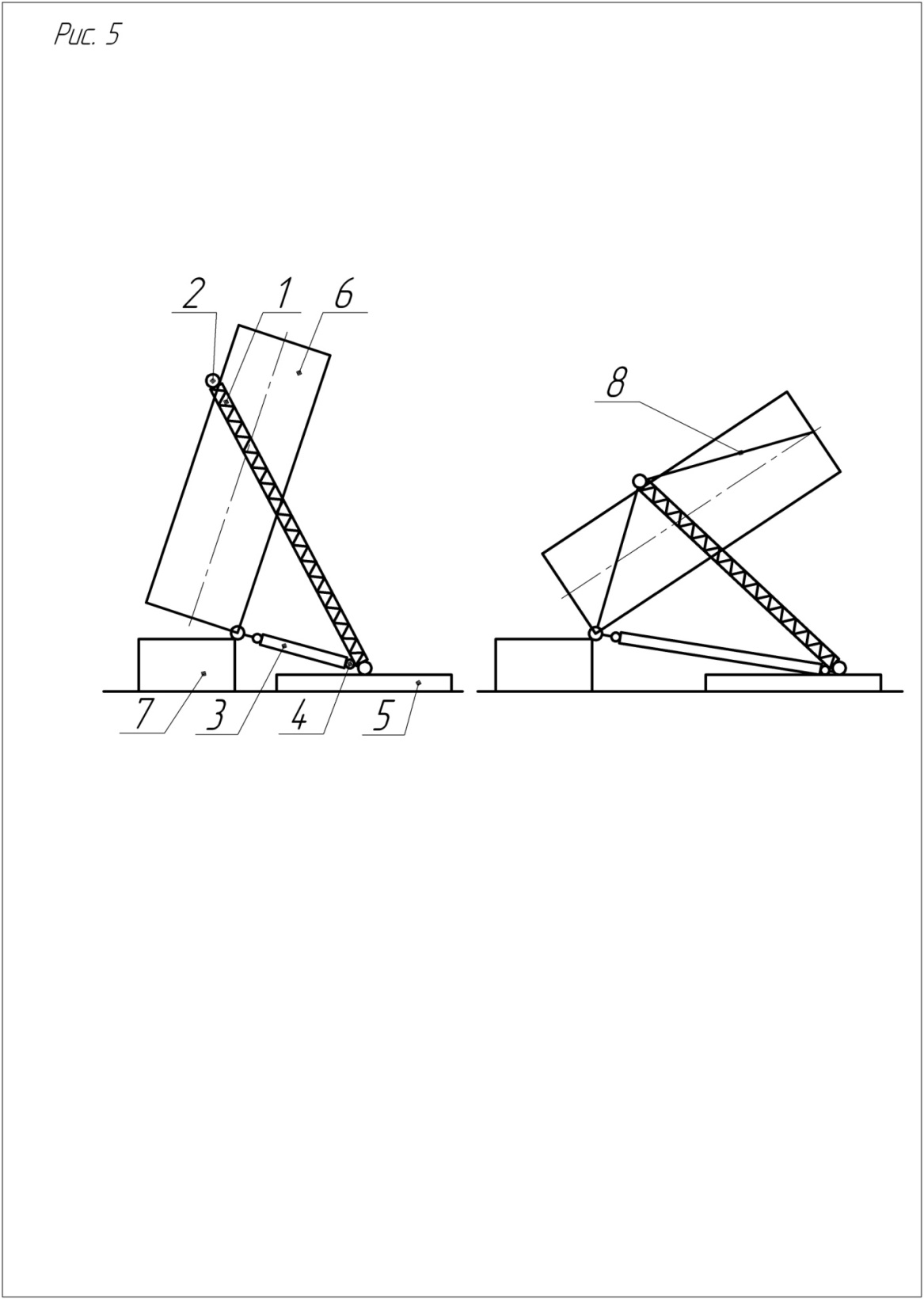
Содержание работы Теоретическая часть Монтаж вертикальных аппаратов методом выжимания производят следующим образом (рис. 1). Аппарат 6 закрепляют в поворотном шарнире 7. Подъёмный портал 1 располагают по оси поднимаемого аппарата и верхней частью закрепляют в шарнире 2 (обычно на верхней образующей аппарата), рисунок 1,а или через гибкие тросовые подвески 8 (рис. 1,б). Нижнюю часть портала, снабженную опорными катками с шарниром 4, устанавливают на рельсы 5. Грузовые полиспасты 3 соединяют нижней частью портала с поворотным шарниром аппарата. При работе полиспастов портал, перемещаясь по рельсам, поднимает аппарат в вертикальное положение.
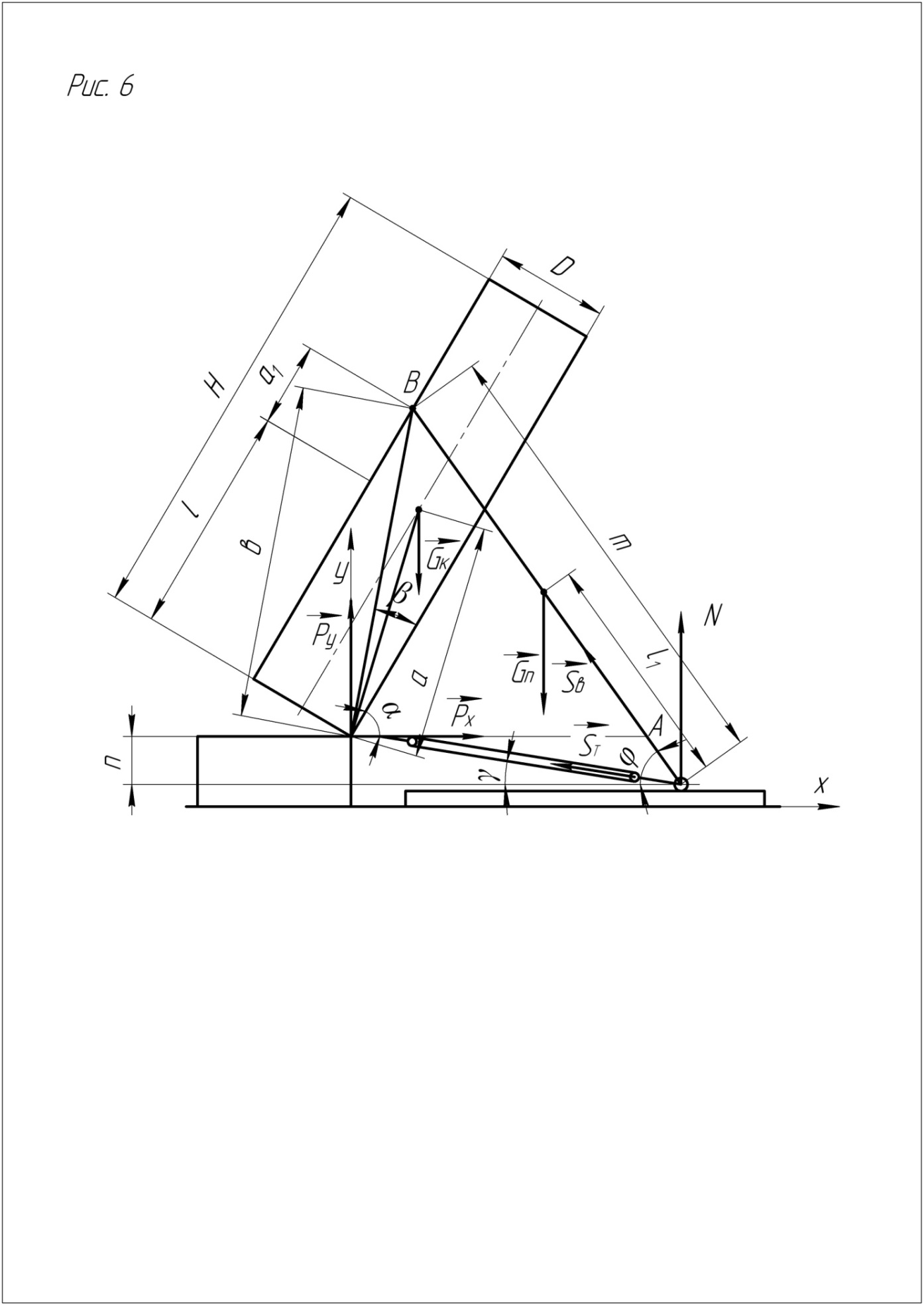
а б А – закреплённым на оси в верхней образующей аппарата; б – с помощью тросовых подвесок. Рисунок 1 – Монтаж аппарата методом выжимания Расчётная схема подъёма аппаратов методом выжимания представлена на рисунке 2. Расчётные усилия на грузовые полиспасты при данной схеме подъёма зависят от геометрии кинематической схемы, которая исключает использование растяжек и якорей, а также весовых и габаритных характеристик поднимаемого оборудования. Максимальные усилия при данном методе подъёма возникают в начальный момент и, как правило, они принимаются за расчётные.
Как известно, усилия в такелажной оснастке зависят от положения центра тяжести аппарата, точки закрепления портала, его длины и веса.
Рисунок 2 – Расчётная схема усилий при подъёме аппарата методом выжимания Таким образом, для определения усилий, возникающих в портале SB (усилие выжимания), в тяговом полиспасте S Т, в шарнире Р X, Ру, а также на направляющие рельсы N необходимо знание геометрических характеристик данной кинематической схемы подъёма. Из условия равновесия системы определим усилие выжимания с учётом веса портала:
где
Зная усилие SB, определим вертикальное давление N портала на рельсы. При известных направлениях усилия выжимания и усилия N из силового треугольника находим по теореме синусов усилие:
Проектируя все силы на ось ОХ, при условии равновесия, получим:
Тогда усилие ST с использованием (2) определим из выражения:
Опорная вертикальная составляющая реакции поворотного шарнира с учётом веса портала имеет вид:
Горизонтальное усилие, действующее на шарнир, определяется как:
где μ – коэффициент трения (μ = 0,1 – для катковых опор; μ = 0,3 – для скользящих опор); S л – тяговое усилие лебёдки; χ – угол между осью полиспаста и ходовой ниткой. Если на лебёдку трос сбегает с неподвижного полиспаста, то в формуле (6) усилие S л имеет знак «плюс», если с неподвижного полиспаста – то знак «минус». При подъёме аппарата по схеме (рис. 1, а) рекомендуется строповку портала на верхней образующей аппарата производить из условий: 1) вблизи центра тяжести аппарата: a ≥ 7· c, (7)
где с – разность отметок осей шарнира аппарата и верхнего шарнира портала в исходном положении аппарата; 2) оптимальное расположение места крепления портала на верхней образующей аппарата: b = a ·(1÷1,2). (8) 3) минимальная длина портала определяется из соотношения: m ≥ 1,1·(b + n). (9) Рассчитанная длина портала должна обеспечивать размещение рабочих полиспастов при конечном вертикальном положении аппарата, что иногда проверяется графическим построением схемы подъёма в масштабе. Если при расчёте усилий вес портала не учитывается, то расчётную силу тяжести принимают равной:
Коэффициент k выбирается в зависимости от веса аппарата (табл. 1).
Таблица 1 – Зависимость коэффициента K от веса аппарата
Аналитический расчёт усилий, возникающих в такелажной оснастке, не исключает графического построения этапов подъёма аппарата данным методом, из которых могут быть определены значения, как усилий, так и углов наклона аппарата, портала, рабочего полиспаста.
|
||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-20; просмотров: 220; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.189.22.136 (0.007 с.) |
 , (1)
, (1)
 .
. . (2)
. (2) . (3)
. (3) . (4)
. (4) . (5)
. (5) , (6)
, (6) . (10)
. (10)


