
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Описание лабораторной установки
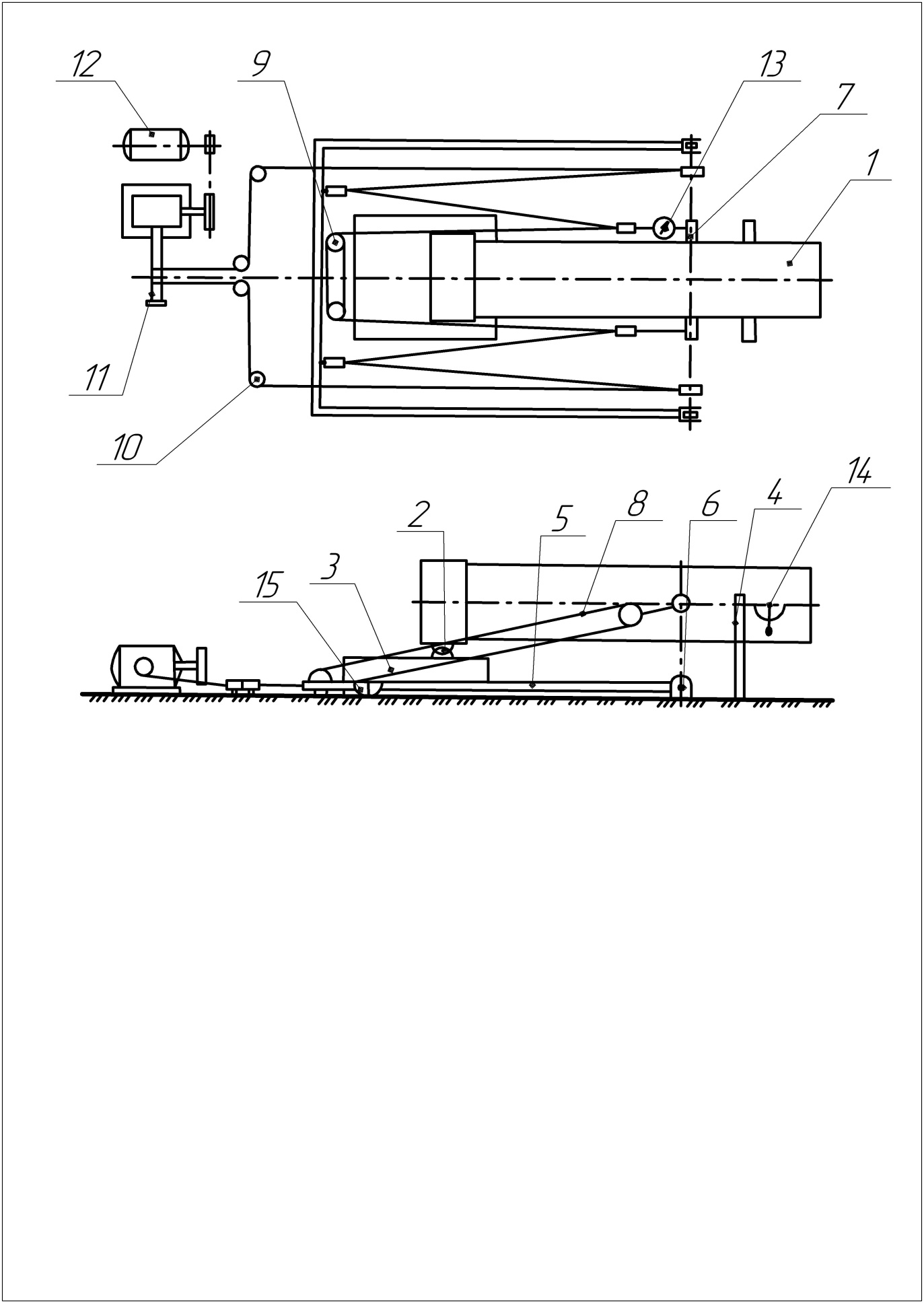
Схема установки приведена на рисунке 4. В исходном положении колонна 1 закреплена у основания в шарнире 2 фундамента аппарата 3 и верхним концом уложена на опору 4. Монтажный портал 5 расположен оголовком в сторону фундамента колонны и закреплён на шарнирных опорах 6, установленных на одной вертикали с монтажными штуцерами 7 (т.е. местом строповки аппарата). Грузовые полиспасты 8 с уравнительными блоками 9 связывают портал 5 с монтажными штуцерами 7. Тяговые ветви полиспастов через отводные ролики 10 связаны с барабанами лебёдки 11, приводимыми во вращение электродвигателем 12. для изменения тягового усилия в процессе подъёма портала и колонны в одну из ветвей полиспаста вмонтирован динамометр 13. Углы наклона портала и колонны измеряются с помощью угломеров 14 и 15.
Рисунок 4 – Схема запасовки полиспастов
Методика проведения эксперимента 1. Включить электродвигатель тяговой лебёдки. Зафиксировать усилие в грузовых полиспастах в начальный момент подъёма портала. 2. Замерить угол наклона портала и усилие в полиспастах в момент срыва аппарата. 3. В процессе подъёма аппарата через каждые ≈ 10° (по угломеру колонны) замерять усилие в грузовых полиспастах, а также фиксировать соответствующие углы наклона портала. 4. При достижении нулевого усилия в полиспастах включить тяговую лебёдку и замерить углы наклона колонны и портала, соответствующие положению неустойчивого положения равновесия системы колонна-портал. 5. Спустить портал и колонну в исходное положение включением реверса тяговой лебёдки.
Обработка экспериментальных данных Результаты измерений занести в таблицу. Привести расчётные значения измеренных величин. Усилия в тяговых полиспастах для 1 и 2 этапов подъёма рассчитываются по формулам (4) и (18). Угол подъёма портала в момент отрыва колонны от опоры φ0, а также угол неустойчивого равновесия системы портал-колонна α 0 определяется по формулам (10) и (22). При проведении опытов нет необходимости строго выдерживать указанные значения углов φ и α. Результаты сопоставления опытных и расчётных значений (% расхождения) заносится в таблицу. На основании полученных данных необходимо построить графики зависимости Sn расч. = f (φ) для 1-го этапа и Sn расч. = f (α) для 2-го этапа подъёма, на которые необходимо нанести экспериментальные точки.
Содержание отчёта Протокол отчёта должен содержать цель и содержание работы, основные расчётные формулы, схему лабораторной установки, её техническую характеристику, таблицу опытных и расчётных данных. Графики Sn расч. (φ) и Sn расч. (α) должны быть оформлены на миллиметровой бумаги или с использованием пакетов прикладных программ для ЭВМ. В отчёте необходимо привести примеры расчёта тягового усилия для 1-го и 2-го этапов подъёма, а также φ0 и α0. Отчёт должен содержать выводы по результатам проделанных опытов.
9. Контрольные вопросы 1. В чем заключается безъякорный метод подъёма вертикальных аппаратов? 2. Назовите преимущества и недостатки данного метода подъёма. 3. Какие требования к взаимному расположению портала и колонны? 4. В какой момент времени возникают максимальные усилия: в тяговом полиспасте, в шарнире колонны, в шарнире портала, в самом портале? 5. Как изменяются усилия в такелажной оснастке в процессе подъёма? 6. Чем определяется выбор или расчёт основных характеристик портала и грузовых полиспастов?
ЛАБОРАТОРНАЯ РАБОТА № 2 МОНТАЖ АППАРАТОВ МЕТОДОМ «ПАДАЮЩЕГО» ШЕВРА Введение Цель работы Определение усилия в такелажной оснастке при различных углах подъёма колонны методом «падающего» шевра (портала).
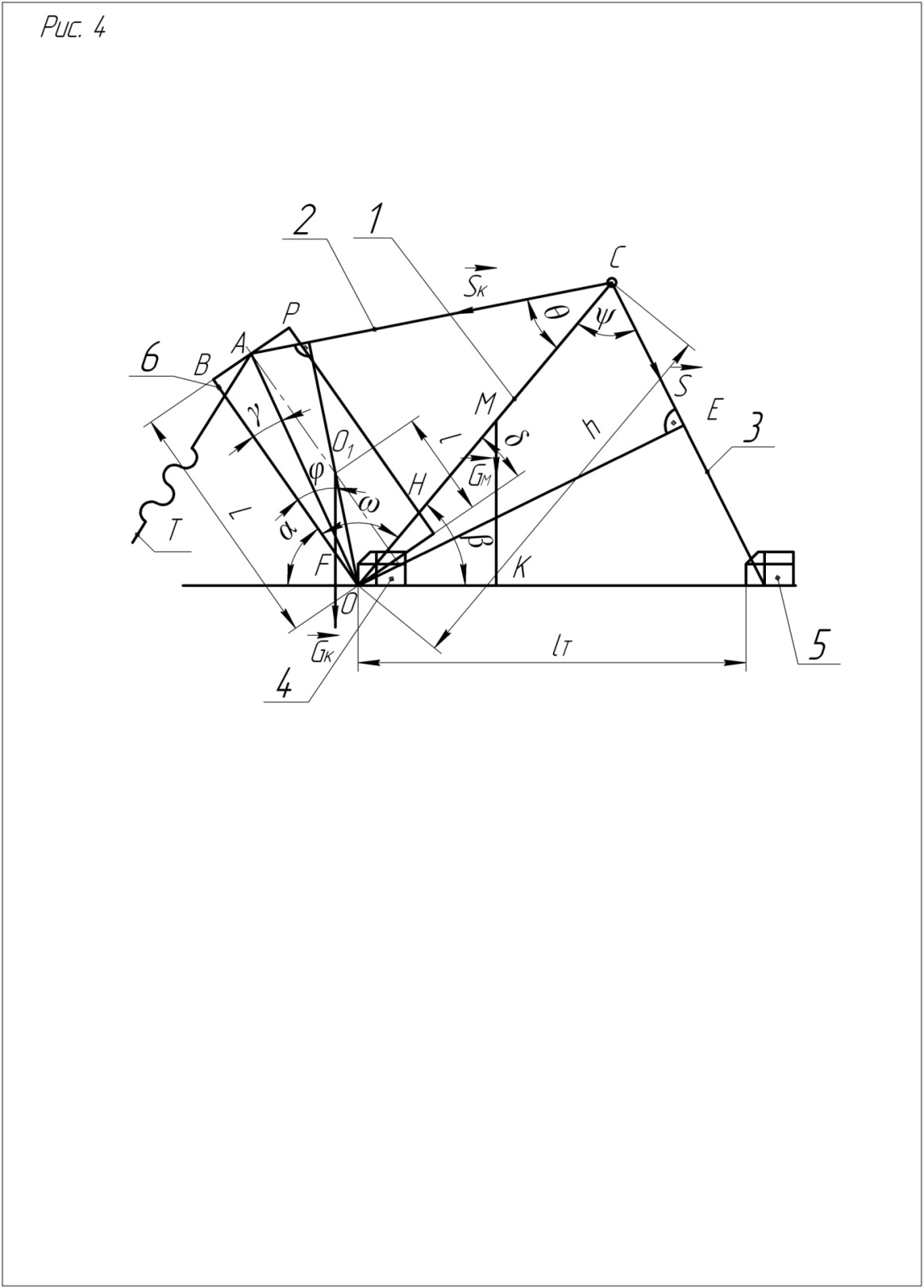
Содержание работы Теоретическая часть При подъёме аппаратов методом «падающего» шевра одновременно с переходом аппарата из горизонтального положения в вертикальное вокруг шарниров наклоняются к земле «падающие» порталы. На расчётной кинематической схеме (рис. 1) проведена основная такелажная оснастка, применяющаяся при подъёме вертикальных аппаратов методом «падающего» шевра, которая работает следующим образом.
Рисунок 1 – Монтаж аппарата методом «падающего» шевра «Падающий» портал 1 укрепляют на опорном шарнире 4 вертикально или с небольшим отклонением от вертикали в сторону вершины аппарата 6. Верх портала соединяют тросы 2 с вершиной аппарата и тяговым полиспастом 3, соединенным с лебёдкой-якорем 5. При натяжении тягового полиспаста 3 портал наклоняется и тянет за собой аппарат. Когда портал займет горизонтальное положение или близкое к нему, поднимаемый аппарат занимает положение, близкое к проектному (вертикальному). При переходе аппаратом положения неустойчивого равновесия его притормаживают оттяжкой 7. Использование А-образных «падающих» порталов даёт ряд преимуществ перед неподвижно установленными мачтами, применяемыми для монтажа аппаратов: 1) высота портала принимается меньше, чем высота мачт; 2) менее трудоёмки операции монтажа и демонтажа портала; 3) компенсация нагрузок на фундамент аппарата за счёт совмещения в одном шарнире опор аппарата и портала; 4) отсутствие боковых расчалок и якорей для крепления порталов. При монтаже крупногабаритного тяжеловесного оборудования нагрузки на грузовой полиспаст будут функциями весовых характеристик такелажных средств, в частности, веса портала. Поэтому в таких случаях необходимо расчёт усилий, возникающих в такелажной оснастке, проводить с учётом их весовых характеристик. Рассматривая равновесие системы колонна-портал относительно точки О для определения усилия в тросовом соединении оголовка портала с колонной, получим:
Подставляя уравнения (2-4) в уравнение (1) и решив его относительно неизвестной S к, получим выражение:
По известной величине усилия, возникающего в тросовом соединении (5), подбирается диаметр тросов и число ниток, а также проверяется прочность узлов аппарата, к которым крепится тросовая стяжка. Определение усилия в тяговом полиспасте портала проводится из уравнения равновесия:
Окончательно уравнение для определения усилия в тяговом полиспасте с учётом уравнений (2-3) имеет вид:
По известной величине усилия в тяговом полиспасте Sn подбирается диаметр тросов, количество ниток полиспаста, блоки полиспаста, унифицированная тяговая лебёдка и якорь. Выбор оптимальных размеров и расположения такелажных средств при подъёме вертикальных аппаратов методом А-образного «падающего» портала проводят, учитывая следующие соотношения и положения: 1) высота портала принимается равной: h = l ·(1,4-2,4); (9)
2) расстояние от опор портала до основного якоря равно: lm = l ·(5-7); (10) 3) расстояние от основания аппарата до места его строповки: L = l ·(1,3-1,4); (11) 4) угол предварительного наклона портала от вертикали в сторону поднимаемого аппарата 10÷17o; 5) место строповки аппарата выбирают из условия обеспечения прочности аппарата и минимальных нагрузок на такелажные средства; 6) выбор места крепления портала проводится из условия обеспечения подъёма аппарата в нейтральное положение за один приём, при этом наиболее оптимальным является такое, при котором ось повторного шарнира аппарата и поворотных шарниров портала совмещаются в данной конструкции; 7) при ограниченной грузоподъёмности подъёмных и тяговых полиспастов, а также порталов, смещают оси шарниров шевра к центру тяжести аппарата, так как в этом случае уменьшаются максимальные нагрузки на полиспасты в момент отрыва аппарата от земли.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-20; просмотров: 134; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.102.112 (0.012 с.) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 (1)
(1) (2)
(2) (3)
(3) (4)
(4) (5)
(5) (6)
(6) (7)
(7) (8)
(8)


