
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Суммарная диаграмма тангенциальных сил
Для многоцилиндрового двигателя строится суммарная диа- Для двигателя с равными интервалами между вспышками суммарный крутящий момент будет периодически изменяться: для четырехтактного двигателя – через Θ = 720°/ i; для двухтактного – через Θ = 360°/ i, где i – число цилиндров. Обычно tΣ строится графически, при этом кривая за цикл
Рис. 11. Построение сил P, N, S, K и Т по углу поворота коленчатого вала
Полученные таким путем участки кривой наносятся на один
где F 1 и F 2 – положительная и отрицательная площади на диа- По величине Т определяют крутящий момент одного цилиндра (МН∙м): МКР. Ц = Т ∙ R. (4.15)
Силы, действующие на шатунные шейки коленчатого вала
Силы, действующие на шатунные шейки рядных и V -образных двигателей, определяют аналитическим способом или графическим построением. Рядные двигатели Аналитически результирующая сила, действующая на шатунную шейку рядного двигателя (рис. 13а):
где Р К = S + P S – сила, действующая на шатунную шейку по криво- Направление результирующей силы R Ш. Ш для различных поло- tg ψ = T / PK. (4.17) Результирующую силу R Ш. Ш, действующую на шатунную шейку, можно получить геометрическим сложением силы Р К, действующей Графическое построение силы R Ш. Ш в зависимости от угла по-
Рис. 13. Силы, действующие: а – на шатунную шейку вала; б – на колено вала
При рассмотрении силы R Ш. Ш как суммы сил Т и Р К по- Из точки О Ш – полюса диаграммы – по оси абсцисс Для получения полярной диаграммы концы результирующих
На рис. 14б, в полярная диаграмма нагрузки на шатунную шейку построена геометрическим сложением сил К и Р S. Различие заключается в построении сил К: в первом случае они определены геометрическим сложением сил Т и Z, т. е. Построение полярной диаграммы нагрузки на шатунную шейку (см. рис. 14в) геометрическим сложением суммарной силы К, действующей по оси шатуна, с центробежной силой инерции Р S . Ш, действующей по кривошипу, осуществляется следующим образом. Из точки О, представляющей собой центр условно неподвижной коренной шейки, радиусом, равным в принятом масштабе радиусу кривошипа, описывают окружность. Из точки О' – центра шатунной шейки в в.м.т. – проводят вторую окружность радиусом, равным в том же масштабе длине шатуна. Окружность с центром О делят на равное число частей (обычно на 12 или 24). Через точки деления из центра О проводят лучи до пересечения с окружностью, проведенной из точки О'. Эти лучи представляют собой относительные положения оси условно вращающегося цилиндра двигателя. Принято, что цилиндр вращается с угловой скоростью, равной Для нахождения результирующей силы R Ш. Ш необходимо переместить полюс О' по вертикали на величину силы Р S . Ш (постоянной по величине Чтобы геометрически сложить векторы сил К и Р S . Ш для какого-либо положения кривошипа (например, 23), достаточно провести из полюса О Ш вектор О Ш 23. Этот вектор, являющийся геометрической суммой векторов О Ш О' = Р S . Ш и О' 23 = К 23, по величине и направлению соответствует искомой силе Р S . Ш . 23. Таким образом, векторы, соединяющие начало координат (по- Для получения результирующей силы R К = R Ш. Ш + Р S . К (см. рис. 13б), действующей на колено вала и изгибающей шатунную шейку, необходимо полюс О Ш переместить по вертикали (см. рис. 14) на величину цен-тробежной силы инерции вращающихся масс кривошипа Р S . K = – m K ∙ R ∙ ω 2 в точку О К. Построение результирующих сил R К для углов φ 13 = 390º показано на рис. 14б, в. Аналитически сила (см. рис. 14б)
где R P. K = P R + P S. K = Z + R S . Ш + R S . К = К + Р S – сила, действующая на колено вала по кривошипу (на рис. 14б показано построение силы R K 1 Для определения средней результирующей силы за цикл R Ш. Ш. СР,
Рис. 15. Диаграмма нагрузки на шатунную шейку в прямоугольных координатах V -образные двигатели При определении результирующих сил, действующих на шатунную шейку V -образного двигателя, необходимо учитывать конструктивное выполнение соединения шатунов с коленчатым валом. Для V -образных двигателей с сочлененными шатунами (с шатунной шейкой соединен только один шатун) результирующую силу R Ш. Ш. Σ, действующую
Силы Т Σ и Р К. Σ определяют табличным способом с учетом порядка работы двигателя Т Σ = Т Л + Т П, Р К. Σ = Р К. Л + Р К. П = Z Л + P S . Ш. Л + Z П + P S . Ш. П = Z Σ + P S . Ш. Σ.. Углы поворота коленчатого вала в V -образных двигателях отсчитывают от положения первого кривошипа, соответствующего в.м.т.
Рис. 16. Силы, действующие на шатунную шейку коленчатого вала
Если интервалы между рабочими ходами правых и левых цилиндров на различных кривошипах одинаковы, то суммарные силы, определенные для первого кривошипа, могут быть использованы и для других криво-шипов. Для V -образных двигателей с одинаковыми шатунами, расположен-ными рядом на одной шейке, результирующие силы P S . Ш. Л и P S . Ш. П, действующие на соответствующие участки шатунной шейки, определяют-ся раздельно так же, как и для однорядного двигателя. Однако для при-ближенного определения результирующей силы Р К. Σ, действующей
R K . Σ = P Ш. Ш + P S . К. (8.30) Полярные диаграммы нагрузок на шатунную щеку и на колено вала Результаты динамического расчета заносят в табл. 9.
Таблица 9. Результаты динамического расчета
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 .
.
 ,
, Рис. 12. Построение кривой суммарного крутящего момента четырехцилиндрового четырехтактного двигателя
Рис. 12. Построение кривой суммарного крутящего момента четырехцилиндрового четырехтактного двигателя
 , (4.16)
, (4.16)

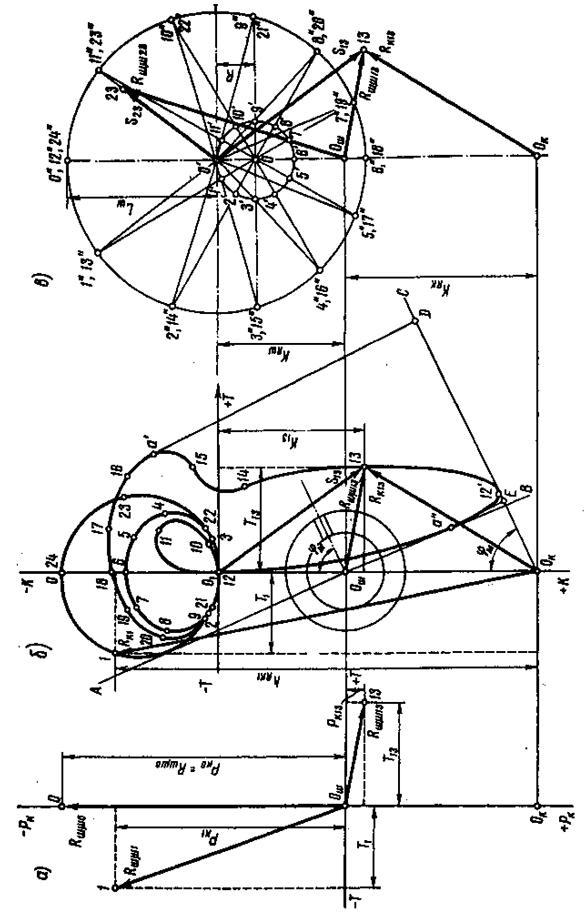
 , и показано построение силы К 13, соответствующей углу φ 13 = 390° поворота кривошипа; во втором силы К, предварительно подсчитанные аналитически, непосредственно суммиру-ются с силой Р S . Ш.
, и показано построение силы К 13, соответствующей углу φ 13 = 390° поворота кривошипа; во втором силы К, предварительно подсчитанные аналитически, непосредственно суммиру-ются с силой Р S . Ш. ,
,
 .
.







