
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет валов и подшипников главной передачи
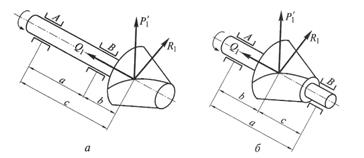
Валы главной передачи рассчитываются на прочность и жесткость под действием максимально возможного крутящего момента. Надежность и жесткость валов главной передачи, срок службы подшипников определяются, исходя из реакций в опорах, зависящих от значений сил, действующих в зацеплении (рис. 5.11).
Рис. 5.11. Силы, действующие на ведущую коническую шестерню главной передачи: а - с консольной установкой; б – с установкой на дополнительной опоре; А и Б – опоры вала Общая сила взаимодействия шестерен раскладывается по трем осям на окружную, осевую и радиальную силы, значения которых могут быть определены по следующим формулам. Для ведущей шестерни конической главной передачи с пересекающимися осями шестерен: окружная сила P1 = где rср1 – средний радиус начального конуса шестерни; rср1 = r01 – 0,5Lsinδ1; r01 – радиус основания начального конуса шестерни; L – длина зуба по образующей начального конуса; δ1 – половина угла начального конуса шестерни; осевая сила Q1 = где β1 – угол спирали зуба ведущей шестерни в среднем сечении; α – угол зацепления; радиальная сила R1 = В указанных формулах знак «+» - при одинаковых направлениях вращения и спирали; «-» - при разных направлениях вращения и спирали; знак «+» соответствует направлению осевой силы Q1 к основанию конуса шестерни, а радиальной силы R1 к оси вала шестерни. Поскольку у ведомой и у ведущей шестерен такой конической передачи углы спирали в среднем сечении равны (β1 = β2), имеет место равенство сил: P1 = P2; Q1 = R2; R1 = Q2. Для ведущей шестерни гипоидной главной передачи: окружная сила P1 = осевая сила Q1 =
радиальная сила R1 = Для ведомой шестерни гипоидной главной передачи: окружная сила P2 = P1 осевая сила Q2 = радиальная сила R2 = При определении Lω и mt заложены допускаемые контактные напряжения на поверхности зуба [ RA = RB = где rср –радиус начального конуса ведущей шестерни в среднем сечении. По данным опорным реакциям далее проводится расчет валов и подшипников аналогично расчетам коробки передач (3.16…3.17 и 3.19…3.24). Расчет валов на проводится с определением прогибов в горизонтальной и вертикальной плоскостях. При консольном расположении ведущей шестерни (рис. 5.11,а) прогиб вала в горизонтальной плоскости определится по формуле: fг = P где E – модуль упругости 1-го рода; J – момент инерции сечения вала при изгибе. Прогиб в вертикальной плоскости определится по формуле: fв = R При установке вала на дополнительной опоре (рис. 5.11,б) прогибы вала:
в горизонтальной плоскости fг = P в вертикальной плоскости fв = R Допустимые прогибы валов и смещения шестерен приведены на рис (5.9). Дифференциал 5.2.1. Назначение и требования к дифференциалам. Типы дифференциалов Дифференциалом называется механизм трансмиссии, распределяющий подводимый к нему момент между ведущими колесами одного моста или между ведущими мостами и позволяющий ведомым валам вращаться с неодинаковой угловой скоростью. По месту расположения и выполняемым функциям дифференциалы подразделяются на межколесные и межосевые. Межколесный дифференциал устанавливается в ведущем мосту, обеспечивает вращение колес с разной угловой скоростью при движении автомобиля на повороте или неровных дорогах и исключает при этом их скольжение и буксование. Межосевой дифференциал устанавливается в раздаточной коробке, распределяет момент между ведущими мостами полноприводного автомобиля и предотвращает циркуляцию мощности в трансмиссии. К дифференциалу, как механизму трансмиссии, кроме общих требований предъявляются дополнительные требования, обусловленные его назначением, в соответствии с которыми он должен: • распределять крутящий момент между ведущими колесами и мостами пропорционально нагрузке, действующей на них, и обеспечивать автомобилю наилучшие тягово-скоростные свойства, проходимость, управляемость и устойчивость; • иметь минимальные габаритные размеры; •. Иметь высокое значение КПД. Типы дифференциалов по расположению, внутреннему трению, по распределению крутящего момента и по конструкции приведены на рис. 5.12…5.16.

Рис. 5.12. Типы и классификация дифференциалов
В качестве межколесного дифференциала применяются шестеренчатые симметричные дифференциалы (рис. 5.13, а), в котором полуосевые шестерни имеют одинаковый диаметр и равное число зубьев. Такого типа дифференциалы применяются и в качестве межосевого на автомобилях с колесной формулой 4×4. На грузовых автомобилях с колесной формулой 6×6 применяются несимметричные дифференциалы, которые распределяют крутящий момент между передним ведущим мостом и ведущими мостами задней тележки не поровну, а пропорционально нагрузке на них. В таких дифференциалах полуосевые шестерни не одинакового диаметра. Наиболее распространены несимметричные дифференциалы в виде планетарного механизма (рис. 5.13, г), в котором шестерни 3 и 4 неодинакового диаметра и с разным количеством зубьев. Корпус 1 такого дифференциала соединен осями (водилом) с сателлитами 2, а те в свою очередь с шестернями 3 и 4, передающими крутящий момент соответственно на заднюю тележку и передний ведущий мост.
Рис. 5.13. Схемы шестеренчатых дифференциалов: а, б – симметричные; в, г – несимметричные; 1 – корпус; 2 – сателлит; 3, 4 – полуосевые шестерни Несимметричный конический дифференциал, приведенный на (рис. 5.13, в), имеет полуосевые шестерни 3 и 4 разного диаметра и с разным количеством зубьев, соединенные с коническими сателлитами 2, оси которых не лежат на одной прямой.. Шестеренчатый дифференциал (рис. 5.13) состоит из корпуса 1, сателлитов 2 и полуосевых шестерен 3 и 4, которые полуосями соединены с ведущими колесами автомобиля. На легковых автомобилях применяются дифференциалы с двумя сателлитами, расположенными на пальце, а на грузовых с четырьмя сателлитами, размещенными на шипах крестовины. При прямолинейном движении по ровной дороге ведущие колеса вращаются с одинаковой скоростью, сателлиты не вращаются вокруг своей оси, корпус дифференциала, сателлиты и полуосевые шестерни вращаются как одно целое. На ведущие колеса передаются одинаковые крутящие моменты. При движении автомобиля на повороте внутреннее колесо проходит меньшее расстояние, чем внешнее. Полуосевая шестерня со стороны этого колеса замедляет свое вращение. При этом сателлиты начинают вращаться вокруг осей и ускоряют вращение полуосевых шестерен внешнего колеса. В результате внешнее и внутреннее колеса вращаются с разной угловой скоростью, обеспечивая качение колес без скольжения и буксования. Шестеренчатые дифференциалы имеют малое внутреннее трение и коэффициент блокировки kб, представляющий собой отношение момента трения Mтр к моменту на коробке дифференциала Mд (kб = Шестеренчатый дифференциал, у которого полуосевые шестерни не одинакового размера и имеют не одинаковое число зубьев являются несимметричными (рис. 5.13, в, г). При этом по конструкции они могут быть конические (в) и цилиндрические (г). Несимметричный дифференциал, как правило, устанавливается в раздаточных коробках полноприводных автомобилей с колесной формулой 6×6 для распределения крутящего момента между передним и задними мостами пропорционально действующим на них нагрузкам. Кулачковые дифференциалы имеют повышенное внутреннее трение и применяются, как правило, на автомобилях повышенной проходимости. Конструктивно они изготавливаются с горизонтальным (рис. 5.14,а) или с радиальным (рис. 5.14,б) расположением сухарей. Сухари могут располагаться в один или в два ряда в отверстиях обоймы 2 корпуса 1 дифференциала между полуосевыми звездочками 4 и 5, установленными на шлицах полуосей. В таком дифференциале сухари выполняют роль сателлитов.
Рис. 5.14. Кулачковые (а, в) и червячные (в, г) дифференциалы: 1 – корпус; 2 – обойма; 3- сухарь; 4, 5 – звездочки; 6, 8 – червяки; 7 – червяк - сателлит; 9, 10 – полуосевое червячное колесо При прямолинейном движении автомобиля по ровной дороге сухари неподвижны по отношению к обойме и полуосевым звездочкам, упираются своими торцами в профилированные кулачки полуосевых звездочек и расклинивают их. Все детали дифференциала вращаются как одно целое и ведущие колеса моста вращаются с одинаковой угловой скоростью. При движении автомобиля на повороте или по неровной поверхности дороги одно колесо вращается медленнее, а другое быстрее; сухари начинают перемещаться в обойме и скользить по профилированной поверхности звездочек, обеспечивая ведущим колесам возможность вращаться с разной угловой скоростью. При таком перемещении сухарей в дифференциале увеличивается внутреннее трение, что способствует повышению проходимости автомобиля. Коэффициент блокировки таких дифференциалов может составлять значения kб = 0,3…0,5. Червячные дифференциалы могут быть с сателлитами (рис. 5.14, в) и без сателлитов (рис. 5.14, г). Крутящий момент в дифференциале с сателлитами передается от корпуса 1 через палец (крестовину) на сателлиты 7, червяки 6 и 8 к полуосевым червячным колесам 9 и 10 и далее на полуоси автомобиля. В дифференциале без сателлитов червячные шестерни 6 и 8 соединены осями с корпусом дифференциала 1 и находятся в зацеплении между собой. Крутящий момент передается от корпуса дифференциала 1 к червячным шестерням 6 и 8, а от них червячным колесам 9 и 10. Червячные дифференциалы имеют повышенное внутренне трение, что способствует улучшению проходимости автомобиля. Коэффициент блокировки таких дифференциалов может составлять значения kб = 0,8. Однако они наиболее сложны по конструкции, дороже других при изготовлении, так как червячные колеса изготавливаются из оловянистой бронзы. КПД таких дифференциалов значительно меньше, чем в других конструкциях, что приводит к заметным потерям мощности в трансмиссии. Конструкция дифференциалов Конструкция межколесного симметричного шестеренчатого конического дифференциала приведена на рис. 5.15. Неразъемный корпус 1 такого дифференциала осью (рис. 5.15, а) или крестовиной (рис. 5.15, б) соединен с сателлитами 2, которые в свою очередь соединены с полуосевыми шестернями 3. Сателлиты и полуосевые шестерни исполняются прямозубыми. Число зубьев сателлитов и полуосевых шестерен может быть четным и нечетным, но для обеспечения сборки должно обеспечиваться условие:
где Zш – число зубьев полуосевой шестерни;
nс – число сателлитов; k – целое число. Для уменьшения трения в таких дифференциалах часто трущиеся поверхности разъединяют антифрикционными шайбами 4. Торцовые поверхности сателлитов и внутреннюю поверхность корпуса делают сферической формы, что способствует лучшему центрированию и более точному зацеплению конической зубчатой передачи.
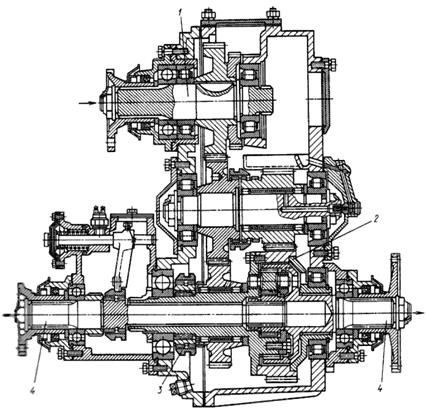
Рис. 5.15. Конструкция межколесного симметричного шестеренчатого дифференциала: а – с двумя сателлитами; б – с четырьмя сателлитами Конструкция несимметричного межосевого дифференциала автомобиля КАМАЗ-4310 приведена на рис. 5.16. Такой дифференциал распределяет момент между передним мостом и задней тележкой в отношении, равном отношению диаметра начальной окружности солнечной шестерни к диаметру начальной окружности эпициклического колеса. Привод к переднему мосту постоянно включен, а дифференциал имеет принудительную блокировку, осуществляемую с помощью пневматического привода. Крутящий момент от ведущего вала 1 через шестерни промежуточного вала передается на корпус дифференциала 2 и далее к ведомым валам 4.
Рис. 5.16. Конструкция раздаточной коробки с несимметричным межосевым дифференциалом автомобиля КАМАЗ-4310 5.2.3. Кинематические и динамические связи в дифференциале Дифференциалы, применяемые в трансмиссии автомобилей, представляют собой трехзвенный планетарный механизм с двумя степенями свободы. Дифференциал включает в себя: корпус с осью или крестовиной в качестве водила, сателлиты (два или четыре) и две полуосевые шестерни (рис. 5.13). Рассмотрим кинематические связи. Уравнение кинематики дифференциала получают путем остановки водила. Тогда внутреннее передаточное число дифференциала определится p = где z1 и z2 –число зубьев полуосевых шестерен; ω1, ω2, ωд – угловые скорости полуосевых шестерен и корпуса дифференциала. Проведя преобразование уравнения (5.22), получим уравнение кинематики дифференциала: ω1 - pω2 = (1- p)ωд. (5.23) Если внутренне передаточное число (или кинематический параметр) p = -1, т.е. z1 = z2, то дифференциал симметричный (знак «-» указывает, что при остановке водила полуосевые шестерни вращаются в разные стороны). Если кинематический параметр p ≠ 1, то дифференциал несимметричный. При подстановке в уравнение (5.23) кинематического параметра p = -1 получим кинематическое уравнение для симметричного дифференциала: ω1 + ω2 = 2ωд. (5.24) Рассмотрим силовые соотношения. Из условия равновесия внешних моментов, приложенных к дифференциалу, следует: M1 + M2 = Mд, (5.25) где M1, M2 и Мд – моменты на полуосях и корпусе дифференциала. Из условия равенства суммы мощностей на полуосях и мощности на корпусе дифференциала за вычетом мощности потерь на трение (N1 + N2) = (Nд – Nтр), используя уравнение кинематики ω1 - pω2 = (1- p)ωд, можно записать для симметричного дифференциала: M1ω1 + M2ω2 = Mд 0,5(ω1 + ω2) - Nтр. (5.26) Решая совместно (5.25) и (5.26) при условии ω1 > ω2 (полуось, передающая M1 - забегающая; полуось, передающая M2 – отстающая) момент на отстающей полуоси равен: M1(от) = 0,5 (Mд + Mтр); (5.27) момент на забегающей полуоси равен: M2(заб) = 0,5 (Mд - Mтр). (5.28) В уравнениях (5.27) и (5.28) Mтр - общий момент трения в дифференциале, который может быть получен из соотношения: Mтр = Коэффициент блокировки дифференциала представляют в виде отношения момента трения к моменту на коробке дифференциала, т.е. kб = Нередко коэффициент блокировки дифференциала представляют в виде отношения момента на отстающем валу к моменту на забегающем валу:
В зависимости от типа дифференциала коэффициент блокировки в таком представлении изменяется в диапазоне: Симметричный межколесный и межосевой дифференциалы существенно снижают проходимость автомобиля при попадании одного колеса (или моста) в условие малого сцепления колес с опорной поверхностью. Рассмотрим движение ведущего моста в условиях не одинакового сцепления под левым и правым колесами (рис. 5.17): под левым колесом с минимальным коэффициентом сцепления φmin, под правым колесом с максимальным коэффициентом сцепления φmax.
Рис. 5.17. Схема к анализу влияния дифференциала на проходимость Касательные реакции на левом колесе будет составлять Rxлев = Rzл φmin; касательная реакция на правом колесе при симметричном дифференциале не может быть больше, чем Rxправ = Rzп φmin. Тогда суммарная реакция ∑ Rx = 2 Rz φmin. Может иметь место такое значение φmin, что движение автомобиля будет невозможно: одно колесо буксует, второе стоит на месте. При блокировке дифференциала касательная реакция на левом колесе Rxлев = Rzл φmin; касательная реакция на правом колесе Rxправ = Rzп φmax; суммарная реакция ∑ Rx = Rz (φmin + φmax). В этом случае суммарная реакция значительно выше. Наличие повышенного внутреннего трения в дифференциале позволяет улучшить проходимость за счет увеличения момента на отстающем колесе. Преобразуем уравнения (5.27) и (5.28), для чего вынесем за скобки Mд: M1(от) = 0,5 Mд (1+ M2(заб) = 0,5 Mд(1 - Определим оптимальный коэффициент блокировки дифференциала для рассмотренных выше условий (рис. 5.17), полагая, что моменты на левом и правом колесах равны: Mлев = Rz φminrд; (5.31) Mправ = Rz φmaxrд, (5.32) где rд – динамический радиус колеса. Тогда максимальный коэффициент блокировки получим отношением:
При предельных значениях коэффициента сцепления под правым колесом φmax = 0,8 и под левым колесом φmin = 0,1 коэффициент блокировки требуется не более 8,0. Считается, что для повышения проходимости автомобиля иметь коэффициент блокировки дифференциала в пределах
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-05; просмотров: 110; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.226.28.197 (0.056 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 , (5.6)
, (5.6) (tgαcos δ1±sinβ1 cosδ1) (5.7)
(tgαcos δ1±sinβ1 cosδ1) (5.7) (tgαcos δ1±sinβ1 sinδ1). (5.8)
(tgαcos δ1±sinβ1 sinδ1). (5.8) ; (5.12)
; (5.12) ] и допускаемы напряжения изгиба [σF], поэтому заданные долговечность и прочность главной передачи обеспечена. Полученные при расчетах по формулам (5.6…5.14) значения сил P, Q и R используются при определении реакций в опорах A и B (рис. 5.11):
] и допускаемы напряжения изгиба [σF], поэтому заданные долговечность и прочность главной передачи обеспечена. Полученные при расчетах по формулам (5.6…5.14) значения сил P, Q и R используются при определении реакций в опорах A и B (рис. 5.11): ; (5.15)
; (5.15) , (5.16)
, (5.16) (5.17)
(5.17) - Q
- Q  . (5.18)
. (5.18) ; (5.19)
; (5.19) . (5.20)
. (5.20) 







 По
По





 ), составляет kб = 0,05…0,15.
), составляет kб = 0,05…0,15.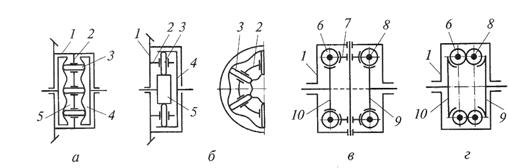
 = k, (5.21)
= k, (5.21)
 =
=  , (5.22)
, (5.22) . (5.29)
. (5.29) =
=  . (5.30)
. (5.30)
 ) = 0,5 Mд (1+ kб); (5.27*)
) = 0,5 Mд (1+ kб); (5.27*) ) = 0,5 Mд (1- kб). (5.28*)
) = 0,5 Mд (1- kб). (5.28*) =
=  =
=  =
=  . (5.33)
. (5.33)


